热熔胶搅拌釜固体物料加料用真空上料系统及真空负压上料方法与流程
[0001]
本发明属于热熔胶生产设备自动化控制领域,具体涉及一种热熔胶搅拌釜固体物料加料用真空上料系统及其真空负压上料方法。
背景技术:
[0002]
热熔胶是一种可塑性的粘合剂,其无毒无味,属环保型化学产品。搅拌釜是热熔胶生产的核心设备,其包括搅拌釜、物料上料系统。搅拌釜用于生成热熔胶,上料系统用于对搅拌釜进行物料进料。
[0003]
但是,现有的热熔胶搅拌釜固体物料上料系统存在如下缺陷和不足:(1)人工加料,直接向搅拌釜内人工投料,对投料速度无法精确控制,有的人投料快,有的人投料慢,即使同一人其投料的一致性也难以保证,因而在加料的时间稳定性、加料速度、加料量等方面存在不确定性,而且操作工人的劳动强度大;(2)储料仓有粉尘外溢,现场粉尘多,生产环境恶劣,影响操作工人的身体健康;(3)生产效率较低。
技术实现要素:
[0004]
针对现有技术存在的缺陷和不足,本发明提供一种热熔胶搅拌釜固体物料加料用真空上料系统,以保证搅拌釜在生产过程中加料时间确定、加料量确定、加料速度确定,提高产品的稳定性和一致性,同时改善生产现场环境,降低操作工人劳动强度,并显著提高生产效率。
[0005]
为了解决以上技术问题,本发明所采用的技术方案如下:
[0006]
本发明的第一方面,提供一种热熔胶搅拌釜固体物料加料用真空上料系统,包括至少一个真空上料子系统,其特征在于:每个所述真空上料子系统包括1台搅拌釜、1台真空上料机、1个真空泵系统、至少1个储料仓和对应个数的小袋拆袋机、以及必要的真空管道和阀门;其中,每个所述真空上料子系统中,所述小袋拆袋机的出料口与对应的所述储料仓的进料口相连通,所述储料仓的出料口通过真空管道与所述真空上料机的进料口相连通,所述真空上料机的出料阀口通过下料管道与所述搅拌釜的进料口相连通,所述真空上料机还与对应的所述真空泵系统相连通。
[0007]
进一步地,每个所述真空上料子系统包括两个或两个以上储料仓和对应个数的小袋拆袋机,所述储料仓相互并联且选择储料仓时互锁连锁,每个所述真空上料子系统每次只对其中一个所述储料仓的物料进行真空输送;所述储料仓的出料口通过共用的真空管道与所述真空上料机的进料口相连通;每个所述真空泵系统包括1个水环真空泵和1个气罐。
[0008]
进一步地,所述热熔胶搅拌釜固体物料加料用真空上料系统包括两个或两个以上相互并联的所述真空上料子系统,两个或两个以上所述真空上料子系统相互独立工作,分别向各对应所述真空上料子系统的所述真空上料机进行真空负压上料。
[0009]
进一步地,每个所述储料仓上均设有在线式料仓称重传感器,用于对储料仓进行
实时称重。
[0010]
进一步地,每个所述小袋拆袋机上均设有粉尘过滤器和除尘风机,用于防止拆袋投料时小袋拆袋机有粉尘外溢。
[0011]
进一步地,每个所述真空上料子系统中,所述储料仓与对应的所述真空上料机之间的共用真空管道上依次设有2个真空压力传感器,用于检测真空管道内的真空压力。
[0012]
进一步地,每个所述储料仓的出料口处均连接有两根吸气管道,所述吸气管道上均设有手动蝶阀,每个手动蝶阀的进气端还设有单向阀,用于确保所述储料仓内的物料不外泄。
[0013]
进一步地,每个所述储料仓的出料口处的真空管线上和第二根所述吸气管道上分别设有出料气动蝶阀和吸气气动蝶阀。
[0014]
进一步地,每台所述真空上料机内均设有粉尘过滤器,每台所述真空上料机上还设有一个料位传感器;和/或,每个所述真空上料机安装有称重传感器。
[0015]
进一步地,每个所述真空上料机的出料口管道上依次设有出料气动蝶阀和气动球阀。
[0016]
进一步地,每个所述真空上料机均与压缩空气管道相连接,其压缩空气管道上设有第一电磁阀,用于在真空吸料时以脉冲方式开启该第一电磁阀以反吹粉尘过滤器,将粉尘过滤器上的粉尘反吹入真空上料机腔室内。
[0017]
进一步地,每个所述真空上料机上还设有第二电磁阀,该第二电磁阀的一端与所述真空上料机相连,另一端与大气相连,在所述搅拌釜下料前先开启该第二电磁阀而破真空,以确保真空上料机下料顺畅。
[0018]
进一步地,每个所述真空上料机与对应的所述真空泵系统之间的真空管道上均设有真空气动蝶阀,并且该真空气动蝶阀与所述第二电磁阀状态互锁。
[0019]
进一步地,每个所述小袋拆袋机的进料端均与压缩空气管道相连接,并且其压缩空气管道上均设有反吹电磁阀,以对所述小袋拆袋机内的粉尘过滤器进行反吹粉尘。
[0020]
进一步地,每台所述搅拌釜上设有真空压力检测器和在线式料仓称重传感器,用于实时检测搅拌釜内的真空压力以及对搅拌釜内的物料进行实时称重。
[0021]
本发明的第二方面,提供一种利用上述热熔胶搅拌釜固体物料加料用真空上料系统进行真空负压上料的方法,该方法包括以下步骤:
[0022]
(1)物料准备:启动所述小袋拆袋机,所述小袋拆袋机上的除尘风机和反吹电磁阀运行,打开投料口,将物料从投料口投入对应的储料仓,投料时所述除尘风机一直运行,反吹电磁阀以脉冲方式运行,利用压缩空气将粉尘吹入储料仓内,实现反吹粉尘;
[0023]
(2)实时称重:利用所述储料仓上所设的在线式称重传感器对物料实时称重,根据储料仓容量、每个搅拌釜需要的物料量进行投料;
[0024]
(3)产生真空:所述真空泵系统设有压力控制器,在压力控制器上设定好真空泵运行压力和停止压力,启动所述真空泵系统,开启所述真空气动蝶阀,所述真空泵系统按设定自动运行,对物料输送管线和真空上料机产生真空环境;
[0025]
(4)真空上料:所述真空上料系统配置有plc控制系统,该plc控制系统接到所述搅拌釜向对应的真空上料子系统发出的上料信号和储料仓选择信号,所述真空上料机运行,开始真空负压上料;
[0026]
(5)出料:当真空上料机上料物料的重量达到设定值时停止真空负压上料,第二电磁阀开启,接通大气,对真空上料机的腔室破真空;再打开气动球阀,延迟5秒后开启出料气动蝶阀,振动电机运行,真空上料机中的物料落入搅拌釜内。
[0027]
本发明的有益技术效果如下:
[0028]
(1)通过在搅拌釜上设置固体物料加料用真空上料系统,实现了固体物料的自动化上料,尤其是整个上料系统为负压真空上料,没有粉尘外溢。
[0029]
(2)在储料仓上和搅拌釜上均设有在线式料仓称重传感器,在真空上料机上设有上料机称重传感器,能够对物料进行实时称重,从而实现定量输送。
[0030]
(3)在储料仓的出料口处的管道上设有手动蝶阀和单向阀,能够保证只向储料仓内吸气,不向储料仓外喷气,从而确保物料不外泄。
[0031]
(4)小袋拆袋机上设有粉尘过滤器和除尘风机,能够确保小袋拆袋机在拆袋投料时无粉尘外溢;而且,小袋拆袋机的进料端设有反吹电磁阀,利用压缩空气将小袋拆袋机中的粉尘以脉冲方式吹入储料仓内,实现反吹粉尘。
[0032]
(5)储料仓与对应的真空上料机之间的真空管道上设有真空压力传感器,用于检测储料仓下方真空管线和进真空上料机前真空管道的真空压力,能够实时判断物料在输送过程中是否出现堵料故障。
[0033]
(6)真空上料机内设有粉尘过滤器,能够过滤粉尘;真空上料机上还设有料位传感器,能够检测真空上料机的料位,防止真空上料机吸入过多物料而堵塞真空上料机的粉尘过滤器。
[0034]
(7)本发明对向搅拌釜投料的时间、数量、均匀性等都能够实现自动控制,生产一致性好,确保了产品品质的稳定性;同时,更加便于工艺工程师优化工艺,不断提高产品品质。
附图说明
[0035]
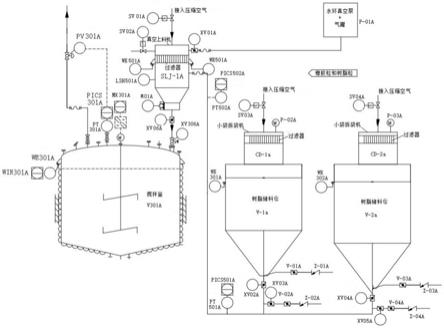
图1是本发明热熔胶搅拌釜固体物料加料用真空上料系统原理示意图,示出其中一个真空上料子系统(a);
[0036]
图2是本发明热熔胶搅拌釜固体物料加料用真空上料系统原理示意图,示出另外一个真空上料子系统(b)。
[0037]
图中:
[0038]
搅拌釜
ꢀꢀ
v301a、v301b
[0039]
储料仓
ꢀꢀ
v-1a、v-2a、v-1b、v-2b
[0040]
小袋拆袋机
ꢀꢀ
cd-1a、cd-2a、cd-1b、cd-2b
[0041]
真空上料机
ꢀꢀ
slj-1a、slj-1b
[0042]
真空泵系统
ꢀꢀ
p-01a、p-01b
[0043]
料位传感器
ꢀꢀ
lsh-501a、lsh-501b
[0044]
在线式料仓称重传感器
ꢀꢀ
we-301a、we-302a、we-301b、we-302b
[0045]
除尘风机
ꢀꢀ
p-02a、p-03a、p-02b、p03b
[0046]
真空压力检测器
ꢀꢀ
pt-501a、pt-502a、pt-501b、pt-502b、pt-301a、pt-301b
[0047]
单向阀
ꢀꢀ
z-01a、z-02a、z-03a、z-04a、z-01b、z-02b、z-03b、z-04b
[0048]
手动蝶阀
ꢀꢀ
v-01a、v-02a、v-03a、v-04a、v-01b、v-02b、v-03b、v-04b
[0049]
储料仓的出料气动蝶阀
ꢀꢀ
xv-02a、xv-04a、xv-02b、xv-04b
[0050]
储料仓的吸气气动蝶阀
ꢀꢀ
xv-03a、xv-05a、xv-03b、xv-05b
[0051]
真空泵的真空气动蝶阀
ꢀꢀ
xv-01a、xv-01b
[0052]
真空上料机的称重传感器
ꢀꢀ
we-501a、we-501b
[0053]
真空上料机的出料气动蝶阀
ꢀꢀ
xv-06a、xv-06b
[0054]
真空上料机的气动球阀
ꢀꢀ
xv-306a、xv-306b
[0055]
真空上料机的第一电磁阀
ꢀꢀ
sv-01a、sv-01b
[0056]
真空上料机的第二电磁阀(破真空电磁阀)
ꢀꢀ
sv-02a、sv-02b
[0057]
反吹电磁阀
ꢀꢀ
sv-03a、sv-04a、sv-03b、sv-04b
[0058]
振动电机
ꢀꢀ
m01a、m01b
具体实施方式
[0059]
下面将结合附图,对本发明的具体实施方式作进一步详细的描述。
[0060]
总体上,本发明的热熔胶搅拌釜固体物料加料用真空上料系统包括至少一个真空上料子系统,优选是2个或2个以上相互并联的真空上料子系统。其中,每个真空上料子系统包括:1台搅拌釜,1台真空上料机,1个真空泵系统,至少1个储料仓和对应个数的小袋拆袋机,以及必要的真空管道和阀门。
[0061]
作为本发明的一个优选实施例,如图1-2所示,该热熔胶搅拌釜固体物料加料用真空上料系统包括2个相互并联的真空上料子系统a和b。其中,每个真空上料子系统(a/b)包括:1台搅拌釜(v301a/v301b),2个储料仓(v-1a、v-2a/v-1b、v-2b),2个小袋拆袋机(cd-1a、cd-2a/cd-1b、cd-2b),1台真空上料机(slj-1a/slj-1b),1个真空泵系统(p-01a/p-01b),以及必要的真空管道和阀门。
[0062]
就是说,本发明这个优选实施例的热熔胶搅拌釜固体物料加料用真空上料系统具体包括:2台搅拌釜v301a、v301b,4个储料仓v-1a、v-2a、v-1b、v-2b,4个小袋拆袋机cd-1a、cd-2a、cd-1b、cd-2b,2台真空上料机slj-1a、slj-1b,2个真空泵系统p-01a、p-01b,以及必要的真空管道和阀门。
[0063]
其中,4个小袋拆袋机cd-1a、cd-2a、cd-1b、cd-2b的出料口与对应的4个储料仓v-1a、v-2a、v-1b、v-2b的进料口分别相连通;4个储料仓v-1a、v-2a、v-1b、v-2b中2个为一组,每组储料仓v-1a、v-2a(v-1b、v-2b)的出料口通过共同的真空管道与其中一台真空上料机slj-1a(slj-1b)的进料口相连通。每台真空上料机slj-1a(slj-1b)的出料口通过真空管道与对应的1个搅拌釜v301a(v301b)的进料口相连通。每个真空泵系统p-01a(p-01b)均包括有1个水环真空泵和1个1立方米气罐;每个真空泵系统p-01a(p-01b)分别与对应的1台真空上料机slj-1a(slj-1b)相连通。这里,4个储料仓v-1a、v-2a、v-1b、v-2b用于储存代发送的物料,4个小袋拆袋机cd-1a、cd-2a、cd-1b、cd-2b用于将袋装物料拆袋后分别倒入对应的储料仓v-1a、v-2a、v-1b、v-2b,2个真空泵系统p-01a、p-01b用于分别对2台真空上料机slj-1a、slj-1b进行抽真空。
[0064]
如图1-2所示,4个储料仓v-1a、v-2a,v-1b、v-2b上分别设有在线式料仓称重传感器we-301a、we-302a、we-301b、we-302b,用于对储料仓进行实时称重,可以实现定量输送功
能。每个小袋拆袋机cd-1a、cd-2a、cd-1b、cd-2b上均设有粉尘过滤器和除尘风机p-02a、p-03a、p-02b、p03b,以确保小袋拆袋机在拆袋投料时无粉尘外溢。
[0065]
如图1-2所示,其中一组储料仓v-1a、v-2a与对应的真空上料机slj-1a之间的真空管道上依次设有真空压力检测器pt-501a、pt-502a,另一组储料仓v-1b、v-2b与对应的真空上料机slj-1b之间的真空管道上也设有2个真空压力检测器pt-501b、pt-502b,这些真空压力检测器分别用于检测储料仓下部真空管线和进真空上料机前的真空管道的真空压力,判断物料在输送过程中是否出现堵料故障。如果检测到储料仓下部真空管线上的真空压力检测器pt-501a(pt-501b)的压力接近于大气压,而真空上料机前的真空管道上的真空压力检测器pt-502a(pt-502b)的压力接近于-80kpa无大的变化,此时系统发出物料输送堵料故障信号。
[0066]
如图1-2所示,4个储料仓v-1a、v-2a、v-1b、v-2b,每个储料仓的出料口处均连接有两根吸气管道,这些吸气管道上依次设有手动蝶阀v-01a和v-02a、v-03a和v-04a、v-01b和v-02b、v-03b和v-04b,而且这些手动蝶阀的进气端还依次对应设有单向阀z-01a和z-02a、z-03a和z-04a、z-01b和z-02b、z-03b和z-04b,用以保证只能向储料仓与真空上料机之间的真空管道内吸气,不能向储料仓外喷气,以确保物料不外泄。
[0067]
而且,4个储料仓v-1a、v-2a、v-1b、v-2b的出料口处的真空管线上和其中第二根吸气管道上,分别设有出料气动蝶阀和吸气气动蝶阀,即xv-02a和xv-03a、xv-04a和xv-05a、xv-02b和xv-03b、xv-04b和xv-05b。
[0068]
开始真空上料输送时,根据所选择的储料仓信号,如果储料仓选择信号为v-1a(即选择储料仓v-1a),则先打开储料仓v-1a的出料气动蝶阀xv-02a,延时1秒后再打开吸气气动蝶阀xv-03a进行吸气,储料仓v-2a下的出料气动蝶阀xv-04a和吸气气动蝶阀xv-05a应关闭,此时物料会向真空上料机slj-1a输送物料1。如果储料仓选择信号为v-2a(即选择v-2a储料仓),则先打开储料仓v-2a的出料气动蝶阀xv-04a,延时1秒后再打开吸气气动蝶阀xv-05a进行吸气,储料仓v-1a下的出料气动蝶阀xv-02a和吸气气动蝶阀xv-03a应关闭,此时物料会向真空上料机slj-1a输送物料2。请注意,储料仓v-1a和v-2a不能同时被选择,相互之间有互锁连锁关系,其下面对应的气动蝶阀亦是互锁连锁。
[0069]
同理,根据所选择的储料仓信号,如果选择储料仓v-1b(即储料仓选择信号为v-1b),则先打开储料仓v-1b的出料气动蝶阀xv-02b,延时1秒后再打开吸气气动蝶阀xv-03b进行吸气,储料仓v-2b下的出料气动蝶阀xv-04b和吸气气动蝶阀xv-05b应关闭,此时物料会向真空上料机slj-1b输送物料1。如果料仓选择信号为v-2b(即选择储料仓v-2b),则先打开储料仓v-2b的出料气动蝶阀xv-04b,延时1秒后再打开吸气气动蝶阀xv-05b进行吸气,储料仓v-1b下的出料气动蝶阀xv-02b和吸气气动蝶阀xv-03b应关闭,此时物料会向真空上料机slj-1b输送物料2。每个真空上料子系统中的2个储料仓,相互之间有互锁连锁关系,其下面对应的气动蝶阀亦是互锁连锁;例如,储料仓v-1a和v-2a不能同时被选择,二者只择其一;储料仓v-1b和v-2b不能同时被选择,二者只择其一。
[0070]
储料仓v-1a可以与储料仓v-1b或v-2b同时选择,储料仓v-2a可以与储料仓v-1b或v-2b同时选择;反之亦然。
[0071]
储料仓选择信号逻辑表如下表1所示(√选中,x不能选中):
[0072][0073]
阀门状态逻辑表如下表2所示(√表示开,x表示关):
[0074][0075]
如图1-2所示,2台真空上料机slj-1a、slj-1b内分别设有粉尘过滤器,2台真空上料机slj-1a、slj-1b上还分别设有料位传感器(带有料位检测开关)lsh-501a、lsh-501b,用于检测真空上料机slj-1a、slj-1b的料位,防止真空上料机吸入过多物料而堵塞真空上料机的粉尘过滤器。而且,2台真空上料机slj-1a、slj-1b上还分别设有2个真空上料机称重传感器we-501a、2个真空上料机称重传感器we-501b,用于对相应真空上料机中的物料进行称重,实现更加精确的加料计量。
[0076]
本发明中,料位检测起到保护作用,防止物料堆积过高而堵塞除尘过滤器。正常工作时都不会触发料位检测开关,如果料位检测开关被触发,不管上料重量是多少,系统会停止向真空上料机内上料。正常生产时,输入每次需要上料物料的重量,通过对储料仓重量的减重量来判断结束本次上料(真空上料机可能需要运行多次才能达到该重量),真空上料机的重量信号用于结束每次对真空上料机的上料量,搅拌釜的重量用于核对上料计量是否准确。
[0077]
如图1-2所示,真空上料机slj-1a的出料口管道上依次设有出料气动蝶阀xv-06a和气动球阀xv-306a,真空上料机slj-1b的出料口管道上依次设有出料气动蝶阀xv-06b和气动球阀xv-306b。当真空上料机slj-1a或slj-1b上料物料的重量达到设定值时,先打开气动球阀xv-306a/xv-306b,延迟5秒钟后再打开出料气动蝶阀xv-06a/xv-06b,即可将真空上料机中的物料加入搅拌釜中。当真空上料机的称重传感器的重量显示为0时,先关闭出料气动蝶阀xv-06a/xv-06b,延迟5秒钟后再关闭气动球阀xv-306a/xv-306b。气动球阀xv-306a/xv-306b用于确保搅拌釜在加压(压力0.8mpa)工作状态时,将搅拌釜和真空上料机隔离。出料气动蝶阀xv-06a/xv-06b用于开启和关闭真空上料机slj-1a/slj-1b的出料口,关闭时将物料存储在真空上料机中,同时保证真空上料机的密封,确保工作时真空上料机处于真空
环境下。
[0078]
真空上料机slj-1a、slj-1b与相应的真空泵系统p-01a、p-01b之间的真空管道上还分别设有真空气动蝶阀xv-01a、xv-01b。该真空气动蝶阀用于在上料完成后,将真空上料机与真空泵产生的真空环境隔离,使真空上料机脱离真空环境。
[0079]
真空上料机slj-1a、slj-1b还均与压缩空气管道相连接,并且其压缩空气管道上分别设有第一电磁阀sv-01a、sv-01b。在进行真空上料时,以脉冲方式(开2秒,关30秒)开启该第一电磁阀,用于将真空上料机中粉尘过滤器上的粉尘反吹入真空上料机腔室内。
[0080]
真空上料机slj-1a、slj-1b还分别设有与上述第一电磁阀互锁的第二电磁阀sv-02a、sv-02b,该第二电磁阀为破真空电磁阀,其一端与真空上料机相连,另一端与大气相连通。在真空吸料完成以后,下料时,先关闭第一电磁阀,再开启第二电磁阀,大气进入真空上料机,真空上料机的腔室内实现破真空,这样物料能够顺利进入搅拌釜中,确保真空上料机下料顺畅。而且,真空上料机上的第二电磁阀sv-02a/sv-02b与真空气动蝶阀xv-01a/xv-01b的状态互锁,即,真空气动蝶阀开启时第二电磁阀关闭,而真空气动蝶阀关闭时才能开启第二电磁阀,以确保真空泵产生的真空源环境正常。
[0081]
如图1-2所示,4个小袋拆袋机cd-1a、cd-2a、cd-1b、cd-2b的进料端均与压缩空气管道相连接,并且该压缩空气管道上分别设有反吹电磁阀sv-03a、sv-04a、sv-03b、sv-04b。通过反吹电磁阀的控制,利用压缩空气将小袋拆袋机中粉尘过滤器上的粉尘以脉冲方式吹入储料仓内,实现反吹粉尘。
[0082]
如图1-2所示,2台搅拌釜v301a、v301b上还分别设有真空压力检测器pt-301a、pt-301b,用于实时检测2个搅拌釜内的真空压力。进一步地,作为优选,2台搅拌釜v301a、v301b上还可以分别设有在线式料仓称重传感器we-301a、we-301b,对搅拌釜内的物料进行实时称重,可以用于校核和对比真空上料物料重量的准确性和真空上料机称重传感器的可靠性。
[0083]
上文描述的是本发明的热熔胶搅拌釜固体物料加料用真空上料系统包括2个相互并联的真空上料子系统的优选实施例。
[0084]
需要说明的是,(1)本发明的热熔胶搅拌釜固体物料加料用真空上料系统,可以根据实际生产需要,设计2个以上的相互并联的真空上料子系统,它们相互独立运行;(2)每个真空上料子系统可以包括2台以上储料仓,它们相互互锁,小袋拆袋机与之相适应,即一个储料仓对应配备一个小袋拆袋机,一个小袋拆袋机对应配备一个除尘风机。
[0085]
下面以上述优选实施例为例,即两个真空子系统a和b同时运行(当然也可以只运行其中一个真空子系统a或b),介绍本发明实现负压真空上料的工艺流程,其包括以下步骤:
[0086]
1.物料准备:启动2个小袋拆袋机cd-1a、cd-1b(或cd-2a、cd-2b),除尘风机p-02a、p-02b(或p-03a、p-03b)和反吹电磁阀sv-03a、sv-03b(或sv-04a、sv-04b)运行,打开投料口,人工将物料小袋拆包(若用吨包时,可将小袋拆袋机更换为吨包拆袋机)后,从投料口将物料投入对应的储料仓。投料时,除尘风机p-02a、p-02b(或p-03a、p-03b)一直运行,反吹电磁阀sv-03a、sv-03b(或sv-04a、sv-04b)以脉冲方式运行,实现反吹粉尘。该脉冲方式具体是,每间隔5分钟开启反吹电磁阀3秒钟,利用压缩空气将粉尘吹入储料仓内。
[0087]
2.实时称重:储料仓v-1a、v-1b(或v-2a、v-2b)上所设的在线式料仓称重传感器
we-301a、we-301b(或we-302a、we-302b)对各自储料仓内的物料实时称重,以便根据储料仓的容量、每个搅拌釜需要的物料量进行投料。
[0088]
3.产生真空:开启真空泵系统p-01a、p-01b,真空泵系统设有压力控制器,在压力控制器上设定好真空泵的运行压力(一般为-50kpa,高于此压力时真空泵运行开始抽真空)和停止压力(一般为-80kpa,低于此压力时真空泵停止抽真空),真空泵系统按此设定的运行压力自动运行,对物料输送管线和真空上料机slj-1a、slj-1b产生真空环境,确保真空上料时的真空环境。真空泵系统配置有1m
3
的真空罐,可减少真空泵的启停频次。
[0089]
4.真空上料:真空上料系统配置有plc控制系统,该plc控制系统接到搅拌釜v301a、v301b向对应的真空上料子系统发出的上料信号和储料仓选择信号,真空上料机slj-1a、slj-1b运行,待对应的储料仓阀门开启后,通过大气压力将储料仓中的物料推送到真空上料机slj-1a、slj-1b中,开始上料。需要注意,储料仓v-1a与v-2a、储料仓v-1b与v-2b分别具有互锁关系,不能同时选中(储料仓选择信号逻辑表如上文的表1所示)。
[0090]
下面以搅拌釜v301a发出上料信号、选择储料仓v-1a为例,描述其运行程序,依次包括以下步骤:
[0091]
a.程序判断真空泵系统的压力在-50~-80kpa之间,若在此压力范围内,说明真空环境正常,可以进行真空上料;
[0092]
b.真空上料机slj-1a上的第一电磁阀sv-01a、第二电磁阀sv-02a以及气动蝶阀xv-01a、xv-02a、xv-03a、xv-06a的初始状态为关闭状态,气动球阀xv-306a为开启状态,完成真空上料前的阀门准备状态;
[0093]
c.手动调节好气动蝶阀xv-01a、xv-02a的开度(约在30%~100%之间,根据所要求的上料速度确定,若要求上料速度快,则阀门开度就大);
[0094]
d.程序自动同时开启气动蝶阀xv-01a、xv-02a、xv-03a,将物料由储料仓v-1a吸入真空上料机slj-1a中,此时第一电磁阀sv-01a间隔20秒反吹2秒自动运行,将真空上料机slj-1a中粉尘过滤器上的粉尘反吹入真空上料机的腔室中;
[0095]
e.若检测到储料仓v-1a的料仓重量差达到设定的上料量(真空上料机的上料量),则关闭出料气动蝶阀xv-02a,储料仓v-1a停止出料。
[0096]
f.吸气气动蝶阀xv-03a继续运行10秒钟后关闭5秒钟,按此时间间隔脉冲运行2次,利用吸气管道吸入大气将真空上料管线(即储料仓与对应真空上料机之间的真空管道)中的残余物料输送到真空上料机中;再运行10秒钟后关闭气动蝶阀xv-01a、xv-03a,电磁阀sv-01a间隔2秒反吹2秒,自动运行2次,确保真空上料管线中的物料输送干净,并且真空上料机中滤袋上的粉尘被反吹入真空上料机的腔室中;
[0097]
g.第一电磁阀sv-01a关闭,停止反吹;第二电磁阀(破真空电磁阀)sv-02a开启,接通大气,对真空上料机slj-1a的腔室破真空,便于物料下料;
[0098]
h.出料气动蝶阀xv-06a开启,振动电机m01a运行,向搅拌釜v301a下料;
[0099]
i.在线式料仓称重传感器we-501a检测到真空上料机slj-1a的重量为零或所设定的下料时间到时,则关闭出料气动蝶阀xv-06a,振动电机m01a停止运行;
[0100]
j.关闭气动球阀xv-306a。
[0101]
至此,完成一个上料周期。之后,真空上料过程如此循环进行。
[0102]
如果上料过程中,真空压力检测器pt-501a/pt-502a、pt-501b/pt-502b检测的压
力值超过0.1kpa,则自动关闭所有阀门,提示堵料报警,人工清理管线后才能再次投入自动运行。
[0103]
本发明的搅拌釜固体物料加料用真空上料系统,其控制程序可以用plc单独自成单元运行,也可以集成到工艺主plc控制系统中实现控制。
[0104]
本发明利用所述真空上料系统进行真空上料,解决了自动定时、定量上料的问题,对上料的精确性和均匀性能够实现自动控制,生产一致性好,确保了产品品质的稳定性,而且实现生产过程自动化,提高了自动化程度。
[0105]
由于树脂和橡胶物料中均有50~500微米颗粒的粉尘,采用其他正压等输送方式,粉尘会外溢到生产车间现场中,采用本真空上料系统输送树脂和橡胶时,管道、储料仓均处于负压状态,不会有粉尘外溢到工厂车间环境中的情况产生,很好地改善了生产车间现场工作环境,同时也减少了操作人员的工作强度。
[0106]
本发明的热熔胶搅拌釜固体物料加料用真空上料系统并不限于上述具体实施方式。本领域技术人员根据本发明的发明构思和技术方案进行变型所得出的其他等同实施方式,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1