末端执行器以及末端执行器的控制装置的制作方法
1.本发明涉及一种末端执行器以及末端执行器的控制装置。
背景技术:
2.在专利文献1中记载了一种机器人示教系统,该机器人示教系统具备:从属机构部,其具有能够再现人的手臂的动作的多自由度多关节机械臂;主机构部,其识别包括书写者对工件进行的文字的书写或图画的描绘在内的书写动作,并以能够再现所述书写动作的方式对所述多自由度多关节机械臂进行示教;以及控制器,其与所述从属机构部及所述主机构部连接,对由所述主机构部识别出的所述书写动作进行运算处理,并对所述从属机构部的所述多自由度多关节机械臂进行控制。所述主机构部具有:书写信息取得单元,其安装在用于由所述书写者把持并对所述工件进行所述书写动作的书写用具,对相应于所述书写动作依次变化的所述书写用具的三维位置及姿态进行检测并作为书写信息而取得;工件信息取得单元,其对进行所述书写动作时的所述工件的倾斜度角度及旋转角度进行检测并作为使所述书写信息与时间序列对应的工件信息而取得;以及书写工件信息送出单元,其将取得的所述书写信息及所述工件信息相对于所述控制器送出。所述控制器具有:书写工件信息接收单元,其接收从所述主机构部送出的所述书写信息及所述工件信息;书写控制数据送出单元,其基于接收到的所述书写信息,对使所述多自由度多关节机械臂再现所述书写动作的书写控制数据进行运算处理,并向所述从属机构部送出;以及工件控制数据送出单元,其基于接收到的所述工件信息,对由所述多自由度多关节机械臂再现的所述书写动作时使用的、控制从属侧工件的动作的、工件控制数据进行运算处理,并向所述从属机构部送出。所述从属机构部具有:书写控制数据接收单元,其接收从所述控制器送出的所述书写控制数据;所述多自由度多关节机械臂,其基于接收到的所述书写控制数据而被控制,在一端安装有用于再现所述书写动作的从属侧书写用具;工件控制数据接收单元,其接收从所述控制器送出的所述工件控制数据;以及工件驱动部,其基于接收到的所述工件控制数据而被控制,相应于所述书写动作时的所述工件的变化而使所述从属侧工件的倾斜度角度及旋转角度变化。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2006-62052号公报
技术实现要素:
6.本发明的目的在于提供一种能够与机械臂连接的末端执行器,该末端执行器具备相机、支承构件和笔。
7.本发明提供一种末端执行器,其能够与机械臂连接,其中,所述末端执行器具备:相机;支承构件,其具有标识器,并能够对工件进行支承;以及笔,其对工件进行涂布,相机配置于能够同时拍摄笔的笔头和标识器的位置。
8.根据本发明,能够提供一种可以与机械臂连接的末端执行器,所述末端执行器具备相机、支承构件和笔。
附图说明
9.图1是示出末端执行器2把持着工件wk的把持状态的立体图。
10.图2是示出末端执行器2把持着工件wk的把持状态的侧视图。
11.图3是示出末端执行器2把持着工件wk的把持状态的主视图。
12.图4是示出末端执行器2把持着工件wk的把持状态的俯视图。
13.图5是示出利用末端执行器2所具备的笔br向工件wk的表面涂布防潮剂等涂覆剂的涂布时状态的立体图。
14.图6是示出利用末端执行器2所具备的笔br向工件wk的表面涂布防潮剂等涂覆剂的涂布时状态的侧视图。
15.图7是示出利用末端执行器2所具备的笔br向工件wk的表面涂布防潮剂等涂覆剂的涂布时状态的主视图。
16.图8是示出利用末端执行器2所具备的笔br向工件wk的表面涂布防潮剂等涂覆剂的涂布时状态的俯视图。
17.图9是末端执行器2的放大图。
18.图10是示出相机cam的配置例的图,(a)是主视图,(b)是侧视图。
19.图11是示出控制装置100的硬件结构例的框图。
20.图12是示出基于控制装置100进行的控制的涂布工序的流程图。
21.图13是示出笔br的笔头未与工件wk接触的状态(未涂布的状态)的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的图。
22.图14是示出对工件wk朝向拍摄图像的下方向进行涂布的状态的图,(a)是主视图,(b)是正侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是示出映入拍摄图像的笔br的笔头的形状的第二图。
23.图15是示出对工件wk朝向拍摄图像的上方向进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是示出映入拍摄图像的笔br的笔头的形状的第二图。
24.图16是示出对工件wk朝向拍摄图像的左方向进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是示出映入拍摄图像的笔br的笔头的形状的第二图。
25.图17是示出对工件wk朝向拍摄图像的右方向进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是示出映入拍摄图像的笔br的笔头的形状的第二图。
26.图18是图14至图17的汇总图。
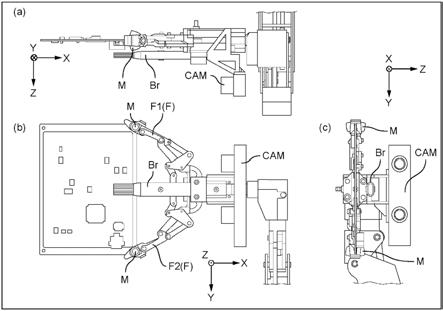
27.图19是示出末端执行器2的图,(a)是主视图,(b)是俯视图,(c)是侧视图。
具体实施方式
28.(完成本发明的背景)
29.在工厂等中使用的机器人装置通过在机械臂安装末端执行器,能够进行各种作业。例如是使用机械手作为末端执行器来拾取在工厂的生产线上流动的部件等作业。该机械臂及末端执行器由与机械臂连接的控制装置(控制器)控制。
30.作为末端执行器的种类,存在具有指部的类型、如所谓的软手那样手部的前端能够变形的类型等,它们支承工件。即,作为支承工件的支承构件有指部、软手等。另外,也存在笔状的末端执行器。笔状的末端执行器能够对例如车辆所使用的基板等工件涂布防潮剂等涂覆剂。通过该涂布,防止工件的劣化、潮气等。需要说明的是,防潮剂是涂覆剂的一例,涂覆剂中除此以外还包括用于确保绝缘性的绝缘剂、防止灰尘的防尘剂、防止虫害的防虫剂、用于具有对振动的耐受性的耐振动剂等。
31.以往,用于对基板进行自动涂敷的装置大多为对基板喷射涂覆剂的喷雾型。在通过喷雾对基板进行涂覆的情况下,需要对基板的端部进行掩蔽。另外,在基板上通常安装有电子部件,基板上存在凹凸,因此存在无法进行因凹凸而产生的侧面部的涂布这样的问题。
32.因此,在本发明中,利用具备笔的末端执行器进行涂覆剂的涂布。并且,利用相机拍摄正在进行涂布的笔的笔头形状,基于拍摄到的图像来检查是否适当地进行了上述涂布。
33.通过上述的结构,即使不进行掩蔽也能够在基板的端部进行涂布。另外,即使在基板上存在凹凸,也能够均匀地进行侧面部的涂布。以下,对具有这样的优点的本发明的末端执行器进行说明。另外,也对控制本发明的末端执行器的控制装置进行说明。
34.(基于末端执行器2的涂布作业例:把持状态)
35.首先,对使用本发明的末端执行器2相对于工件wk进行防潮剂等涂覆剂的涂布的作业例进行说明。在以下的说明中,在对工件wk进行支承的支承构件为指部这样的前提下进行说明。但是,并不意在将本发明的范围限定于指部,支承构件也可以包括软手等指部以外的各种构件。需要说明的是,工件wk也可以是车辆用的基板等。图1~图4是示出末端执行器2把持着工件wk的把持状态的图。图1是立体图,图2是侧视图,图3是主视图,图4是俯视图。
36.在此,为了容易理解,如各图所示,规定由x轴、y轴、z轴构成的正交坐标系。z轴相对于x轴及y轴垂直,且在高度方向上延伸。另外,各轴的正方向被规定为图1中的箭头的方向,负方向被规定为与箭头反向的方向。
37.图1所示的机器人装置500具备机械臂1,机械臂1以能够滑动的方式安装于轨道r。但是,也可以不使用轨道r,而将机械臂1相对于作业台t直接固定。在图示的例子中,机械臂1为多关节型,具备多个关节(连杆)l。上述各关节(连杆)l经由关节轴j连接。
38.在机械臂1连接有末端执行器2。各关节(连杆)l以各关节轴j为中心旋转,因此机械臂1能够自如地改变末端执行器2所把持的工件wk的位置、角度。
39.末端执行器2具备能够支承工件wk的指部f、以及笔br,在本例中,指部f具备第一指部f1和第二指部f2这两个指部。但是,指部的个数不限于两个,只要能够支承工件wk即可。
40.如各图、特别是图3所示,指部f和笔br可以大致平行地配置,但也可以将指部f和笔br以不大致平行的方式配置。另外,如图1~图4所示,指部f用两个即第一指部f1及第二指部f2的前端部分将工件wk以夹入的方式把持。该工件wk在作业前收纳于省略图示的存货
架等。与机械臂1连接的末端执行器2把持工件wk,并将工件wk放置在设置于作业台t的载置部t1上。
41.在工件wk为基板等那样的较薄的平面状的情况下,如图2所示,通过用第一指部f1及第二指部f2分别具备的槽g接受该工件wk的端部而进行把持。将把持工件wk的状态的第一指部f1及第二指部f2的位置设为指部f的把持位置。
42.另外,末端执行器2具备相机cam。在图示的例子中,相机cam具备两个镜头,但镜头的数量也可以是两个以外。关于该相机cam的用途及配置将在后文叙述。
43.(基于末端执行器2的涂布的作业例:涂布时)
44.图5~图8是示出利用末端执行器2所具备的笔br向工件wk的表面涂布防潮剂等涂覆剂的涂布时状态的图。图5是立体图,图6是侧视图,图7是主视图,图8是俯视图。
45.机械臂1及末端执行器2的基本结构为如上基于图1至图4所述的结构,因此省略说明,对拍摄涂布时的笔br的相机cam进行说明。如图5~图8所示,末端执行器2在将工件wk载置于作业台t上之后,将笔br的前端浸入装有涂覆剂的容器c的孔c1。由于容器c中装有涂覆剂,因此在笔br的前端部附着涂覆剂。在该状态下,末端执行器2所具备的笔br以在作为基板的工件wk之上描绘的方式移动,由此将涂覆剂涂布于工件wk的表面。需要说明的是,在该涂覆剂中也可以混入以黑光发光的染料等。通过对涂布作业结束后的工件wk照射省略图示的黑光,也能够确定涂布的遗漏部分。
46.末端执行器2具备相机cam。相机cam相对于工件wk拍摄正在进行涂布的过程中(涂布时)的笔br的笔头。该拍摄图像用于确认涂布是否正确地进行着。需要说明的是,为了避免在涂布时指部f与工件wk等碰撞,优选笔br的长度比涂布时的指部f的长度长。需要说明的是,在指部f是如图示那样具备关节(连杆)l和关节轴j的类型的情况下,也可以将指部f以打开的方式弯折,成为笔br的笔头比指部f向工件wk侧突出那样的姿态。即,构成为在对工件wk进行基于笔br的涂布的涂布时,笔br的笔头比指部f向工件wk侧突出。由此,能够避免在涂布时指部f与工件wk碰撞。
47.(末端执行器2的放大图)
48.图9是上述的末端执行器2的放大图。如图所示,在第一指部f1及第二指部f2的前端部设置有槽g,该槽g接受工件wk的端部,第一指部f1及第二指部f2将工件wk以夹入的方式把持。该槽g的宽度d可以为与作为工件wk的基板的厚度相同的程度,但槽g的宽度d也可以比基板的厚度大。如果槽g的宽度d比基板的厚度大,则在第一指部f1及第二指部f2将工件wk以夹着的方式把持时,在各指部的前端部产生些许游隙。即,在使末端执行器2移动时产生些许晃动。该晃动吸收末端执行器2搬运工件wk时产生的对工件wk的冲击。其结果是,能够避免工件wk的破损、故障。
49.另外,第一指部f1及第二指部f2分别具备标识器m。标识器m例如可以是红色的灯等,通过根据由相机cam拍摄到的拍摄图像来检测该标识器m的位置,能够识别末端执行器2的当前的形状(第一指部f1及第二指部f2的打开情况等)、工件wk的把持的有无。
50.(相机的配置)
51.图10是示出相机cam的配置例的图,(a)是主视图,(b)是侧面图。相机cam配置于能够拍摄笔br的笔头的位置。另外,相机cam配置在能够拍摄设置于末端执行器2的第一指部f1及第二指部f2的标识器m的位置。通过将相机cam配置在这样的位置,能够使用拍摄图像
同时确认笔br的笔头的状态和末端执行器2的第一指部f1及第二指部f2的状态。
52.在图10的(a)中,末端执行器2处于能够对工件wk涂布涂覆剂的状态。在该状态下,相机cam以能够沿着图示的正交坐标系的x轴方向变更相机的朝向的方式安装。关于该安装方法,也可以使用现有的安装方法。将x轴方向上的相机cam的安装角度设为α。另外,将x轴方向上的相机cam的视场角设为θ1。
53.另外,将沿着图示的正交坐标系的z轴从相机cam的中心下降的垂线方向上的、相机cam的镜头前端部与标识器m的距离设为h。将x轴方向上的、从标识器m到相机cam的中心为止的距离设为l。另外,设为β=arctan(l/h)。
54.此时,将相机的安装角度α设定为满足θ1/2+α>β,由此标识器m收敛于相机cam的视场角内。
55.在图10的(b)中,将关于相机cam的y轴方向上的视场角设为θ2。此时,可以将θ2的值设定为第一指部f1所具备的标识器m和第二指部f2所具备的标识器m双方均收敛于相机cam的视场角θ2内。需要说明的是,与图10的(a)同样地,也可以考虑相机cam的安装角度来决定相机cam的视场角θ2。
56.在此,在图示的例子中,相机cam安装于末端执行器2。即,若通过机械臂1使末端执行器2移动,则相机cam也追随地进行移动。通过上述结构,相机cam相对于笔br及标识器m的相对位置被固定,因此基于相机cam拍摄到的图像的图像处理、计算处理减少,因而优选。但是,相机cam只要处于能够同时拍摄笔br的笔头及标识器m的位置即可。因此,相机cam也可以不安装于末端执行器2。例如,相机cam也可以安装于工厂的顶棚等。
57.(控制装置100的结构)
58.接着,对控制本发明的末端执行器2的控制装置100的例子进行说明。图11是示出控制装置100的硬件结构例的框图。控制装置100与末端执行器2连接,对末端执行器2进行控制。需要说明的是,控制装置100也可以与机械臂1及末端执行器2连接,对机械臂1及末端执行器2进行控制。
59.控制装置100是包括处理器101、存储器102、输入装置103、图像取得部104、末端执行器连接部105、通信装置106和输入输出接口107的结构。存储器102、输入装置103、图像取得部104、末端执行器连接部105、通信装置106、输入输出接口107分别通过内部总线等以与处理器101之间能够进行数据或信息的输入输出的方式连接。
60.处理器101例如使用cpu(central processing unit)、mpu(micro processing unit)、dsp(digital signal processor)或者fpga(field programmable gate array)而构成。处理器101作为控制装置100的控制部发挥功能,进行用于将控制装置100的各部分的动作整合的控制处理、与控制装置100的各部分之间的数据或信息的输入输出处理、数据的计算处理、以及数据或信息的存储处理。另外,处理器101也作为控制末端执行器2的控制部发挥功能。
61.存储器102可以包括hdd、rom、ram等,储存由处理器101执行的各种程序(os、应用软件等)、各种数据。另外,存储器102也可以保存后述的表示笔br的笔头的形状的数据。
62.输入装置103可以包括键盘、鼠标等,具有作为与用户之间的人机接口的功能,输入用户的操作。换言之,输入装置103用于由控制装置100执行的各种处理中的输入或指示。需要说明的是,输入装置103也可以是与控制装置100连接的编程器。
63.图像取得部104能够经由有线或者无线与相机cam连接,取得相机cam拍摄到的图像。控制装置100能够相对于图像取得部104所取得的图像适当地进行图像处理。该图像处理的主体可以是处理器101。另外,控制装置100还可以具备省略图示的图像处理单元,该图像处理单元也可以是与控制装置100连接的结构。在基于处理器101的控制下,能够通过该图像处理单元进行图像处理。
64.末端执行器连接部105是确保与末端执行器2的连接的构成要素,经由末端执行器连接部105将控制装置100与末端执行器2(及机械臂1)连接。该连接可以是使用了连接器及线缆等的有线连接,也可以是基于无线的连接。在该连接时,末端执行器连接部105从末端执行器2取得识别末端执行器2的识别信息。即,末端执行器连接部105作为识别信息取得部发挥功能。需要说明的是,处理器101进而可以从末端执行器连接部105取得识别信息。通过该识别信息,能够确定所连接的末端执行器2的种类。
65.通信装置106是用于经由网络与外部进行通信的构成要素。需要说明的是,该通信可以是有线通信,也可以是无线通信。
66.输入输出接口107具有作为在与控制装置100之间进行数据或信息的输入输出的接口的功能。
67.需要说明的是,控制装置100的上述结构为一例,也可以不必具备上述的构成要素。另外,控制装置100也可以具备追加的构成要素。例如,也可以是,箱型的控制装置100具有车轮,在控制装置100上载置机械臂1及末端执行器2而自动行驶。在该情况下,不需要图1至图4所示的轨道r。
68.(涂覆剂的涂布控制例)
69.图12是示出基于由上述的控制装置100进行的控制的涂布工序的流程图。需要说明的是,该流程图示出了针对一个工件wk的处理工序。但是,也可以按照同样的流程依次对多个工件wk进行涂布处理。
70.首先,在基于处理器101的控制下,机器人装置500将工件wk放置于作业台t的载置部t1(步骤st101)。更详细而言,由处理器101控制的机器人装置500利用第一指部f1及第二指部f2把持配置于保管用的存货架等的工件wk,使工件wk移动,并将工件wk载置于作业台t的载置部t1。
71.接着,在基于处理器101的控制下,末端执行器2相对于工件wk进行涂覆剂的涂布(步骤st102)。该涂布通过末端执行器2所具备的笔br来进行。
72.接着,处理器101基于由相机cam拍摄到的拍摄图像,判定涂布是否成功(步骤st103)。需要说明的是,相机cam至少对笔br的笔头进行拍摄。该拍摄可以每隔规定的时间进行,也可以连续地进行。拍摄到的图像经由图像取得部104取得,由处理器101进行判定处理。关于该判定处理的具体例,基于图13以后的图在后面叙述。
73.在判定为涂布成功的情况下(步骤st103:涂布ok),在基于处理器101的控制下,机器人装置500将工件wk从作业台t的载置部t1卸下(步骤st104)。被卸下的工件wk由机器人装置500向下一作业工序移送。
74.在判定为涂布失败的情况下(步骤st103:涂布ng),处理器101判定对涂布作业中的工件wk涂布的涂布次数是否超过规定的次数(n)。在对涂布作业中的工件wk涂布的涂布次数超过了n次的情况下(步骤st105:是),处理器101检知异常(步骤st106)。需要说明的
是,在检知到异常时,也可以使用省略图示的通知单元(警报器、荧光灯等)对控制装置100的外部通知异常。
75.在检知到异常的情况下(步骤st106),将工件wk从作业台t的载置部t1卸下,处理向步骤st104转移。但是,由于被检知到异常的工件wk的涂布失败,因此被卸下的工件wk不会被移送到下一作业工序,而在修补后被再利用或废弃等。
76.在步骤st105中,在涂布次数未超过规定的次数(n)的情况下(步骤st105:否),返回步骤st102,进行对工件wk的再次涂布(重新涂布)。需要说明的是,在重新涂布时,也可以在与上次涂布中的涂布条件不同的条件下进行再次涂布。例如,设为与上次涂布相比将涂布方向从纵向(x轴方向)改变为横向(y轴方向)、使涂布的部位(坐标)与上次不同等。
77.另外,也可以相对于涂布结束的工件wk进行检查。如上所述,在涂布于工件wk的涂覆剂中可以混入以黑光发光的染料等。通过对涂布作业结束的工件wk照射省略图示的黑光,能够检查是否没有涂布的遗漏部分、不均。该检查可以在将工件wk从作业台t的载置部t1卸下(步骤st104)之前进行,也可以在之后进行。
78.(涂布的成功/失败判定)
79.接着,参照图13以后的图,对上述步骤st103中的判定涂布的成功/失败的具体例进行说明。如上所述,相机cam对笔br的笔头进行拍摄。基于该拍摄图像,处理器101判定涂布的成功/失败。更具体地说,基于由相机cam拍摄到的笔br的笔头的形状,处理器101判定涂布的成功/失败。
80.首先,图13是示出笔br的笔头未与工件wk接触的状态(未涂布的状态)的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的图。
81.如图13的(a)及(b)所示,在未进行涂布的情况下,笔br的笔头未与工件wk接触。因此,映入拍摄图像的笔br的笔头的形状呈没有变形的初始状态的形状(以下称为初始形状)。需要说明的是,末端执行器2所使用的笔br的笔头的初始形状可以考虑各种形状,但在图13的(c)的例子中,以大致长方形例示。表示该初始状态下的笔头的形状的数据可以保存于控制装置100的存储器102等。
82.接着,图14是示出对工件wk朝向拍摄图像的下方向(+x方向)进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是映入拍摄图像的笔br的笔头的形状的第二图。需要说明的是,在图14~图18中,上下方向(x轴方向)及左右方向(y轴方向)示出了由相机cam拍摄到的拍摄图像中的上下左右的各方向。
83.如图14的(a)及(b)所示,在朝向拍摄图像的下方向进行涂布的情况下,笔br的笔头与工件wk接触而变形。该变形映入基于相机cam的拍摄图像。
84.如图14的(c)所示,映入拍摄图像的笔br的笔头的形状与初始形状相比,呈更纵长的大致长方形的形状。即,笔br的笔头的形状变形为在拍摄图像上能够识别的程度。因此,处理器101在例如如图14的(c)、(d)所示那样、笔头的前端部发生了变形的情况下,判定为涂布成功(步骤st103:涂布ok)。相反,在无法从拍摄图像检知笔头的前端部发生了变形的情况下,处理器101判定为涂布失败(步骤st103:涂布ng)。
85.对更具体的判定例进行说明。图14的(d)所示的虚线示出了初始形状下的笔头的前端部的位置。在能够从拍摄图像检知笔头的前端部从该虚线部向拍摄图像的上方向伸出
的情况下,判定为涂布成功(步骤st103:涂布ok)。这是因为,由于向拍摄图像的下方向移动笔来进行涂布,因此笔br的笔头的前端部向拍摄图像中的上方向移动是自然的。需要说明的是,也可以是,处理器101取得被保存于存储器102的表示笔br的笔头的初始形状的数据,通过进行与该初始形状的比较来进行上述的判定。
86.图15是示出对工件wk朝向拍摄图像的上方向(-x方向)进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是示出映入拍摄图像的笔br的笔头的形状的第二图。
87.如图15的(a)及图15(b)所示,在朝向拍摄图像的上方向进行涂布的情况下,笔br的笔头与工件wk接触而变形。该变形映入基于相机cam的拍摄图像。
88.如图15的(c)所示,映入拍摄图像的笔br的笔头的形状与初始形状相比,呈在上下方向上较短的大致长方形的形状。即,笔br的笔头的形状变形为在拍摄图像上能够识别的程度。因此,处理器101在例如如图15的(c)、(d)所示那样、笔头的前端部发生了变形的情况下,判定为涂布成功(步骤st103:涂布ok)。相反,在无法从拍摄图像检知笔头的前端部发生了变形的情况下,处理器101判定为涂布失败(步骤st103:涂布ng)。
89.对更具体的判定例进行说明。图15的(d)所示的虚线示出了初始形状下的笔头的前端部的位置。在能够从拍摄图像检知笔头的前端部被向比该虚线部靠拍摄图像的下方向的位置拉入的情况下,判定为涂布成功(步骤st103:涂布ok)。这是因为,由于向拍摄图像中的上方向移动笔来进行涂布,因此笔br的笔头的前端部向拍摄图像中的下方向移动是自然的。需要说明的是,也可以是,处理器101取得被保存于存储器102的表示笔br的笔头的初始形状的数据,通过进行与该初始形状的比较来进行上述的判定。
90.图16是示出对工件wk朝向拍摄图像的左方向(+y方向)进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是映入拍摄图像的笔br的笔头的形状的第二图。
91.如图16的(a)及(b)所示,在朝向相机cam的左方向进行涂布的情况下,笔br的笔头与工件wk接触而变形。该变形映入基于相机cam的拍摄图像。
92.如图16的(c)所示,映入拍摄图像的笔br的笔头的形状与初始形状相比,呈笔头向右侧偏移的形状。即,笔br的形状变形为在图像上能够识别的程度。因此,处理器101在例如如图16的(c)、(d)所示那样、笔头的前端部发生了变形的情况下,判定为涂布成功(步骤st103:涂布ok)。在图16的例子中,是检知到拍摄图像中的笔头的前端部向右方向移动的情况。相反,在无法从拍摄图像检知笔头的前端部发生了变形的情况下,处理器101判定为涂布失败(步骤st103:涂布ng)。
93.对更具体的判定例进行说明。图16的(d)所示的虚线示出了初始形状下的笔头的前端部的位置。在能够从拍摄图像检知笔头的前端部被向比该虚线部靠拍摄图像的右方向的位置拉入的情况下,判定为涂布成功(步骤st103:涂布ok)。这是因为,由于向拍摄图像中的左方向移动笔来进行涂布,因此笔br的笔头的前端向拍摄图像中的右方向移动是自然的。需要说明的是,也可以是,处理器101取得被保存于存储器102的表示笔br的笔头的初始形状的数据,通过进行与该初始形状的比较来进行上述的判定。
94.图17是示出对工件wk朝向拍摄图像的右方向(-y方向)进行涂布的状态的图,(a)是主视图,(b)是侧视图,(c)是示出映入拍摄图像的笔br的笔头的形状的第一图,(d)是示
出映入拍摄图像的笔br的笔头的形状的第二图。
95.如图17的(a)及(b)所示,在朝向拍摄图像的左方向进行涂布的情况下,笔br的笔头与工件wk接触而变形。该变形映入基于相机cam的拍摄图像。
96.如图17的(c)所示,映入拍摄图像的笔br的笔头的形状与初始形状相比,呈笔头的前端部向左侧偏移的形状。即,笔br的形状变形为在图像上能够识别的程度。因此,处理器101在例如如图17(c)、(d)所示那样、笔头的前端部发生了变形的情况下,判定为涂布成功(步骤st103:涂布ok)。在图17的例子中,是检知到拍摄图像中的笔头的前端部向左方向的移动的情况。相反,在无法从拍摄图像检知笔头的前端部发生了变形的情况下,处理器101判定为涂布失败(步骤st103:涂布ng)。
97.对更具体的判定例进行说明。图17的(d)所示的虚线示出了初始形状下的笔头的前端部的位置。在能够从拍摄图像检知笔头的前端部向比该虚线部靠拍摄图像的左方向的位置移动的情况下,判定为涂布成功(步骤st103:涂布ok)。这是因为,由于向拍摄图像中的右方向移动笔来进行涂布,因此笔br的笔头的前端向拍摄图像中的左方向移动是自然的。需要说明的是,也可以是,处理器101取得被保存于存储器102的表示笔br的笔头的初始形状的数据,通过进行与该初始形状的比较来进行上述的判定。
98.如上所述,关于对工件wk朝向拍摄图像的上下左右的各方向进行涂布的情况进行了说明。图18是将它们汇总的图。图18的中央部所示的笔br的笔头的形状是笔头的初始形状。在与该初始形状进行比较的情况下,如果是下方向涂布则笔头的前端部向拍摄图像的上方向移动、变形,如果是上方向涂布则笔头的前端部向拍摄图像的下方向移动、变形,如果是右方向涂布则笔头的前端部向拍摄图像的左方向移动、变形,如果是左方向涂布则笔头的前端部向拍摄图像的右方向移动、变形。通过相机cam来检知该移动及变形。
99.以上,对朝向拍摄图像的上下左右方向进行涂布的情况下的涂布的成功/失败判定进行了说明,但也考虑例如如拍摄图像的右上方向、右下方向等那样朝向倾斜方向进行涂布的情况。在这样的情况下,通过基于相机cam的拍摄图像来检知笔头的形状变化,也能够进行涂布的成功/失败判定。在例如朝向拍摄图像的右上方进行涂布的情况下,笔头的前端部以向左下方向移动的方式变形,因此能够基于拍摄图像来检知该变形。在该情况下,从拍摄图像检知笔头的前端部向左方向及下方向的移动即可。在向其他倾斜方向进行涂布的情况下,也能够同样地进行涂布的成功/失败判定。
100.(相机cam、笔br、标识器m的相对位置关系)
101.接着,基于图19,示出相机cam、笔br和标识器m之间的相对位置关系。图19是示出末端执行器2的图,(a)是主视图,(b)是俯视图,(c)是侧视图。
102.如图19所示,指部f也可以具备标识器m。在该情况下,相机cam配置于笔br的笔头和指部f的标识器m双方映入(两者进入视场角内)的位置。其结果是,相机cam能够同时拍摄笔br的笔头和标识器m。需要说明的是,在支承构件是指部f以外的构件的情况下,也能够通过在支承构件设置标识器、或者构成为使支承构件本身表现某些特征性的形状、图案等手段,而同时拍摄笔头和标识器(包括特征性的形状、图案等)。
103.更优选的是,如图19的(a)~(c)所示,在从笔br观察时,相机cam和末端执行器2的指部f(及指部f所具备的标识器m)不在同一侧。换言之,在图19的(a)、(c)所示的指部f把持着工件wk的把持状态下,各构件在z轴方向(在图10的(a)所示的能够对工件wk涂布涂覆剂
的状态下为x轴方向)上按照相机cam、笔br、指部f的顺序排列。如果是这样的相对位置关系,则从相机cam观察时的笔br配置于比从相机cam观察时的第一指部f1及第二指部f2更接近的位置。其结果是,能够更高精度地拍摄映入拍摄图像的笔br的笔头,因此判定涂布是否成功(步骤st103)的判定精度提高。
104.但是,相机cam、笔br和标识器m之间的相对位置关系也可以与上述不同。例如,能够设为在从标识器m观察时相机cam和笔br不在同一侧那样的位置关系。换言之,各构件按照相机cam、标识器m、笔br的顺序排列。这样的相对位置关系,在利用相机cam进行拍摄时,通过在标识器m不遮挡笔br的笔头的位置配置标识器m,也能够使笔头和标识器m双方同时映入拍摄图像。
105.如上所述,在对工件wk进行基于笔br的涂布的涂布状态下,笔br的笔头比支承构件(指部f等)向工件wk侧突出。由此,在进行涂布时,能够避免支承构件与工件wk等碰撞。
106.另外,相机cam和支承构件不在从笔br观察的同一侧。由此,从相机cam观察时的笔br配置于比从相机cam观察时的支承构件(第一指部f1及第二指部f2等)更接近的位置。其结果是,能够更高精度地拍摄拍摄图像中的笔br,判定涂布是否成功的判定精度提高。
107.另外,控制末端执行器2的控制装置100具备控制部(处理器101),控制部在通过笔br对工件wk进行涂布时的、相机cam拍摄到的拍摄图像中的笔br的笔头的形状相对于笔头的初始形状发生了变化的情况下,判定为涂布成功。由此,能够使用相机cam检知笔头的形状变化,从而判定涂布的成功/失败。
108.另外,在笔br的前端部的位置朝向与涂布中的笔br的移动方向相反一侧的方向发生了变化的情况下,判定为涂布成功。由此,能够根据笔br的移动方向正确地判定涂布的成功/失败。
109.以上,参照附图对各种实施方式进行了说明,但本发明并不限定于上述例,这是不言而喻的。本领域技术人员显然能够在技术方案所记载的范畴内想到各种变更例、修正例、置换例、附加例、删除例、等同例,并理解这些内容当然也属于本发明的技术范围。另外,在不脱离发明的主旨的范围内,也可以将上述各种实施方式中的各构成要素任意组合。
110.产业上的可利用性
111.本发明作为具备相机、支承构件和笔的末端执行器是有用的。
112.附图标记说明:
113.1 机械臂
114.2 末端执行器
115.100 控制装置
116.101 处理器
117.102 存储器
118.103 输入装置
119.104 图像取得部
120.105 末端执行器连接部
121.106 通信装置
122.107 输入输出接口
123.500 机器人装置
124.br 笔
125.cam 相机
126.f 指部(支承构件)
127.f1 第一指部
128.f2 第二指部
129.g 槽
130.j 关节轴
131.l 关节(连杆)
132.m 标识器
133.r 轨道
134.t 作业台
135.t1 载置部
136.wk 工件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1