可旋转混合机的制作方法
1.本发明涉及一种可旋转混合机,该可旋转混合机包括混合机的壳体,在该壳体中,至少一个混合元件能够旋转地安装在对应的驱动轴上,该驱动轴在壳体内部在壳体的纵向方向上延伸,其中驱动轴的端部部分在纵向方向上穿过壳体壁。
背景技术:
2.当填充和操作可旋转混合机时,例如在混凝土部件的生产过程中,可能发生作用在混合元件上和(一个或多个)对应的驱动轴上的大冲击力。由于驱动轴的静态超定轴承和已知可旋转混合机的附接的传动装置,这些冲击力可能会将约束力引入该系统中。因此,发生相对应构件的过大应力,这可能缩短这些构件和/或整个混合机的寿命,使得较早的维护或替换变得有必要。
3.因此,本发明的目的是提供一种可旋转混合机,该可旋转混合机能够减小所发生的冲击力的影响,从而可以延长混合机的相应构件的寿命。
技术实现要素:
4.根据本发明,上述目的通过一种可旋转混合机来解决,该可旋转混合机包括混合机的壳体,在壳体中,至少一个混合元件能够旋转地安装在对应的驱动轴上,该驱动轴在壳体内部在壳体的纵向方向上延伸,其中该驱动轴的端部部分在纵向方向上穿过壳体壁,其中延伸穿过壳体的驱动轴的端部部分旋转固定地并能够轴向移动地联接到驱动单元,驱动单元适于至少驱动该驱动轴,其中该驱动单元经由弹性元件和/或阻尼元件安装到壳体,使得该驱动单元能够相对于相应驱动轴至少在纵向方向上移动。
5.由于驱动单元在驱动轴以及壳体上的这种浮动悬挂,不仅可以支撑驱动单元相对于驱动轴的轴向移位,而且可以支撑驱动单元相对于壳体的移位,或者,可以承受和吸收对应的作用力。
6.当物品填充到混合机的壳体中时,在驱动轴上可能会发生弯矩,该弯矩倾向于使驱动轴横向(即正交于驱动轴的纵向轴线)移位。由于驱动轴支承在壳体上,驱动轴的横向弯曲导致驱动轴的端部部分在壳体外部反作用侧向运动。例如,如果物品被填充到壳体中并填充到驱动轴上,该驱动轴向下弯曲,其中最大位移发生驱动轴的中部在驱动轴的两个支承点之间,在这两个支承点处,驱动轴旋转地支撑在壳体上。因此,在壳体外部延伸的部分在相反的方向上移位,即,当驱动轴的中部在壳体中向下弯曲时,端部部分向上倾斜,使其枢转点位于驱动轴在壳体上的轴承中。特别地,如果驱动单元可以由多个弹性元件悬挂,端部部分的弯曲位移也可以被承受和吸收,因为驱动单元可以跟随这种该弯曲运动。
7.驱动单元,优选地是驱动单元的传动装置,可以经由键接连接例如花键轴或渐开线齿连接到驱动轴的端部部分。特别地,驱动单元可由至少三个弹性元件和/或阻尼元件支撑,所述弹性元件和/或阻尼元件围绕驱动轴的纵向轴线周向分布,特别是基本相等地分布。弹性元件和/或阻尼元件可以沿驱动轴的纵向轴线延伸,并且可以以铰链连接到壳体
和/或驱动单元以允许驱动单元相对于壳体的径向运动(相对于纵向驱动轴轴线)。弹性元件可以是螺旋弹簧。铰链可以各自单独地或组合地在驱动单元与壳体之间形成万向接头。
8.在本发明的一个实施例中,由于驱动单元的重量而作用在驱动单元上的重力可以完全由驱动轴的端部部分支撑。也就是说,支撑驱动轴的轴承也可以支撑所附接的驱动单元的重量。因此,不必在壳体上设置支撑驱动单元重量的附加悬架,该附加悬架可能限制驱动单元相对于壳体的自由运动。
9.驱动单元可以包括马达,优选地是电动马达和传动装置,其中该传动装置具有联接到该马达的输入侧和联接到驱动轴的端部部分的输出侧。例如,马达可以设置在传动装置上方。
10.马达和传动装置的输入侧可通过皮带联接,其中该马达可附接到第一基座,并且该传动装置可附接到第二基座,其中第一基座与第二基座连接成使得第一基座与第二基座能够相对于彼此枢转,其中第一基座与第二基座相对于彼此的枢转运动增加或减小了对应皮带的皮带张力。为此,第一基座与第二基座之间的枢转轴线可以与引导皮带的皮带轮的旋转轴线间隔开。此外,第二基座还可以连接到弹性元件和/或阻尼元件。
11.可能有利的是设置调节机构,优选地是螺杆机构,其被构造成调整和固定第一基座与第二基座之间的相对取向。通过致动该调节机构,并改变第一基座与第二基座之间的相对取向,可将皮带拉紧或放松。使用螺杆机构,该螺杆机构可以在一个端部处附接到第一基座,并且在另一端部处附接到第二基座,其中螺杆的转动可以延长或缩短螺杆机构,以调节第一基座与第二基座之间的相对取向。此外,可以设置用于将调节机构锁定在期望位置的反向螺杆(counter screw)。
12.在本发明的一个实施例中,可旋转混合机可以包括两个驱动轴,每个驱动轴配备有混合元件。优选地,两个驱动轴被构造成以彼此相反的方向旋转,以增强混合效果。
13.此外,两个驱动轴可以彼此平行地延伸。这可进一步改善混合机壳体内的混合效果。
14.两个驱动轴中的每一个都可以具有在纵向方向上穿过壳体壁的端部部分,其中每个端部部分旋转固定地并能够轴向移动地联接到相关联的驱动单元,其中每个驱动单元适于驱动一个单一的对应的驱动轴。换句话说,每个驱动轴都由其自己的驱动单元驱动。因此,上文关于该一个驱动轴提及的内容同样适用于第二驱动轴。当然,也可以提供多于两个驱动轴,并且上文提及的内容也适用于另外的驱动轴。
15.这两个驱动单元可以各自包括马达和传动装置,其中这两个马达和/或这两个传动装置使用诸如齿轮同步器或弹性联接件的同步器单元来同步。特别地,当该两个驱动轴配备有附接在一个驱动轴上并且伸出接近另一驱动轴或者甚至与另一个驱动轴啮合的混合元件时,重要的是驱动轴以同步的方式旋转,以避免混合元件损坏或卡住。
16.这里,每个马达可以通过皮带联接到同步器单元,并且优选地,该同步器单元通过锥齿轮和行星齿轮联接到两个传动装置,这两个传动装置与对应的驱动轴旋转接合。应当理解,在马达通过皮带联接到同步器单元的情况下,可以不在马达与传动装置之间设置皮带。在这一点上应该提到,这里的术语“皮带”不限于单个皮带,而是可以包括多个皮带,例如v形皮带和/或槽式(ripped)驱动皮带。
17.有利地,驱动单元可以通过扭转支撑件支撑在壳体上以抵抗绕对应的驱动轴的纵
向轴线的旋转运动。这可以分别减小引入到弹性元件和/或阻尼元件以及相应的铰链连接件中的旋转应力。
18.扭转支撑件可以在其一侧附接到壳体,并且在其另一侧附接到基座,该基座支撑驱动单元的附接到对应驱动轴的部分。支撑驱动单元的该部分的基座优选地可以是支撑驱动单元的传动装置的第二基座。
19.扭转支撑件可以包括弹性元件,该弹性元件被构造成减小从驱动单元经由扭转支撑件传递到壳体中的应力。例如,在扭转支撑件的每个附接侧上,可以设置橡胶孔眼,该橡胶孔眼减小甚至吸收例如当启动混合机时引入到扭转支撑件中的初始应力。
附图说明
20.在下文中,参考附图,使用具体实施例更详细地解释本发明,其中:
21.图1示出了根据本发明的可旋转混合机的实施例的透视图;
22.图2示出了沿图5中的线ii-ii截取的图1的混合机的截面顶视图;
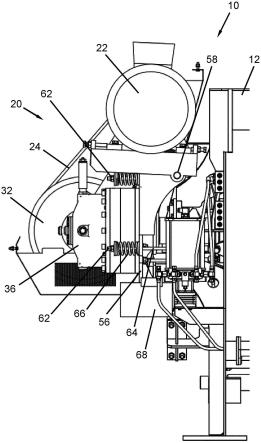
23.图3以侧视图示出了混合机的细节;
24.图4示意性地示出了图1的混合机的驱动轴的移位运动;和
25.图5示出了混合机的前视图。
具体实施方式
26.在图1中,根据本发明的可旋转混合机总体上用附图标记10表示。混合机10包括壳体12,待由混合机10混合的组分,例如用于混合混凝土的组分,可以从顶部填充到壳体12中。
27.在此实施例中,两个驱动轴14和16布置在壳体12的内部(见图2),这两个驱动轴14和16在水平纵向方向a上平行延伸,并且在图2中从左向右平行延伸。驱动轴14、16中每一个配备有多个混合元件18,多个混合元件18被构造成执行混合动作,就像多个铲子在混合这些组分一样。
28.此外,图1示出了在壳体12的外部设置有两个驱动单元20、21,为每个驱动轴14、16设置一个驱动单元。两个驱动单元20、21在这里各自包括马达22、23,在此实施例中,马达22、23是电动马达22、23,其中每个马达22、23通过旋转驱动皮带轮28、30来驱动皮带24、26。皮带24、26缠绕在驱动皮带轮28、30之一上,并缠绕在由皮带24、26驱动的相应的从动皮带轮32、34上。然后,从动皮带轮32、34各自连接到相关联的传动装置36、38,传动装置36、38是驱动单元20、21的一部分,驱动单元20、21被构造成驱动对应的驱动轴14、16。
29.在两个从动皮带轮32、34之间设置有同步器单元40(也见图3),该同步器单元40适于同步两个从动皮带轮32、34的旋转运动。这样做,例如,即使马达22、23可以以稍微不同的致动速度驱动这些驱动皮带轮28、30,也能够确保两个驱动轴14、16以同步的方式旋转。如在图2可以看到的,混合元件18(仅示出了其中的一些)从它们所附接的驱动轴14或16经过中部伸向另一驱动轴16或14。因此,驱动轴14、16的同步旋转运动由同步器单元40同步,确保混合元件18不会彼此接触或甚至彼此损坏。
30.现在,参考图2,每个驱动轴14、16包括穿过壳体12的壳体壁46的端部部分42、44。驱动轴14、16由轴承50、51支撑在壳体壁46中,并且还由轴承52、53支撑在驱动轴14、16的相
对纵向端部上的相对壳体壁48中。
31.端部部分42、44经由键接连接例如渐开线齿连接到传动装置36、38。因此,传动装置36、38仅滑动到端部部分42、44上,使得传动装置36、38与端部部分42、44之间的连接适于传递旋转力(扭矩)但不传递轴向力。换句话说,允许在传动装置36、38与端部部分42、44之间的在驱动轴的纵向方向上的相对轴向运动。
32.图3示出了可旋转混合机10的安装有驱动单元20的区域的侧视图。这里,马达22安装在传动装置36上方的第一基座54上。传动装置36安装在第二基座56上。第一基座54和第二基座56通过铰链58相互铰接。通过调节第一基座54相对于第二基座56的相对取向,能够改变驱动皮带轮28与从动皮带轮32之间的距离。这样做,皮带24的张力被改变,使得皮带24可以根据需要被拉紧或放松。
33.为了以简单和可靠的方式调节第一基座54与第二基座56的相对取向,设置了作用在第一基座54与第二基座56之间的螺杆机构60。通过操作螺杆机构60,第一基座54相对于第二基座56倾斜,从而调节皮带张力。应当理解,对于驱动单元20和/或驱动轴14和/或第一基座54/第二基座56等给出的描述也可以适用于另一驱动单元21。
34.驱动单元20,即所示实施例中的第二基座56,经由弹性元件62支撑在壳体上。弹性元件62均包括杆64,该杆64在其一个端部上能够枢转地铰链连接到混合机10的壳体12。杆64的另一端部穿过第二基座56,其中压缩弹簧66设置在杆64的自由端部与第二基座56之间,使得弹簧66在壳体12的方向上偏压第二基座56。在所示的实施例中,驱动单元20、21中的每一个由三个弹性元件62支撑。附加地,可以提供适于阻尼第二基座56的摆动运动的阻尼元件。
35.现在,当驱动轴14和因此端部部分42从图2所示的其位置移位时,不论是沿驱动轴14的纵向轴线a轴向移位还是横向移位导致弯曲运动(参见图4),由于驱动单元20经由弹性元件62浮动悬挂在驱动轴14和壳体12上,驱动单元20可以跟随这种移位。由于马达22、驱动皮带轮28、皮带24、从动皮带轮32和传动装置36都分别支撑在第二基座56或附接的第一基座54上,第二基座56的移位不会导致皮带24的张力变化。此实施例中的同步器单元40设置有橡胶元件,该橡胶元件适于补偿驱动单元20相对于驱动单元21的位移,而不赋予同步器单元40的功能。
36.在图4中,以类似于图3中的观察方向的侧视图示意性地示出了驱动轴14的可能的移位运动。当力施加到驱动轴14上时,例如通过将重物品放置到驱动轴14上,驱动轴14从其直线布置(由虚线a表示)向下弯曲(如箭头l所示)。由于驱动轴14在壳体壁46、48中的轴承支撑,驱动轴14朝向壳体12底部的移位导致端部部分42向上倾斜运动(如图4中的弯曲箭头所示)。
37.接着,端部部分42的倾斜运动导致传动装置36,即驱动单元20的倾斜运动。参考图3和图5,显然驱动单元20的倾斜运动被弹性元件62吸收,使得下部两个弹性元件62的弹簧66被压缩和/或上部弹性元件62的弹簧66被拉伸(与图3所示的位置相比)。此外,基于杆64在壳体12上的铰接布置,杆64可以跟随这种移位。结果,驱动轴14、16的移位可能不会将应力传递到驱动单元20、21在壳体12上的支撑件中,和/或可能不会改变皮带24、26的预定张力。
38.如图5所示,第二基座56可设置有延伸部68,该延伸部68相对于对应的驱动轴14、
16的纵向轴线a在基本径向方向上延伸。延伸部68连接到螺丝扣70的第一端部,螺丝扣70在其第二端部上附接到壳体12。螺丝扣70适于支撑驱动单元20抵抗绕对应的驱动轴14的纵向轴线a周向作用的旋转力。通过转动螺丝扣70,能够调节驱动单元20相对于壳体12的旋转取向。
39.螺丝扣70在其两个端部上能够枢转地移动,从而不会限制驱动单元20的浮动悬挂的功能。附加地,阻尼元件72设置在螺丝扣70的两个端部的可枢转连接部处,以减小从驱动单元20引入到螺丝扣70和引入到壳体12中的震动力。阻尼元件72形成为螺丝扣70的孔眼。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1