一种PCBA板自动翻转点胶设备的制作方法
一种pcba板自动翻转点胶设备
技术领域
1.本发明涉及点胶机械设备领域,特别涉及一种pcba板自动翻转点胶设备。
背景技术:
2.印刷电路板,又称印制电路板,印刷线路板,常使用英文缩写pcb(printed circuit board),是重要的电子部件,是电子元件的支撑体,是电子元器件线路连接的提供者。由于它是采用电子印刷技术制作的,故被称为“印刷”电路板。在印制电路板出现之前,电子元件之间的互连都是依靠电线直接连接而组成完整的线路。现在,电路面板只是作为有效的实验工具而存在,而印刷电路板在电子工业中已经成了占据了绝对统治的地位。
3.pcba是英文printed circuit board assembly的简称,也就是说pcb空板经过smt上件,或经过dip插件的整个制程,简称pcba。
4.目前大多数pcba板的生产过程都会涉及到点胶工艺,点胶工艺有两大作用:防止焊点松动和防潮绝缘。
5.然而,现有生产制造过程中,对于这一工序还是采用人工手动进行,然而大多数pcba板的两面都需要进行点胶处理,这就需要在点胶过程中对pcba板进行翻转,人工手动操作的话效率低且手工搬运劳动强度大,人工成本高。
技术实现要素:
6.本发明的目的是提供一种pcba板自动翻转点胶设备,至少能够解决上述问题之一。
7.根据本发明的一个方面,提供了一种pcba板自动翻转点胶设备,至少包括:
8.机体;
9.进料装置,设置于机体,配置为输入可承载pcb工件的定位治具;
10.顶料装置,安装于机体,配置为顶升定位治具;
11.翻转装置,安装于机体且与顶料装置相配合,配置为对顶料装置顶升的定位治具进行翻转;
12.点胶装置,安装于机体且与翻转装置相配合,配置为对定位治具内的pcb工件进行点胶。
13.由此,本发明提供了一种全新结构的pcba板自动翻转点胶设备,该pcba板自动翻转点胶设备的工作原理如下:
14.s1、进料装置将承载有pcb工件的定位治具输入至顶料装置的上方;
15.s2、顶料装置工作,向上将定位治具顶升;
16.s3、翻转装置工作,先将定位治具夹紧,顶料装置复位;
17.s4、点胶装置工作,对定位治具正面的pcb工件进行点胶;
18.s5、定位治具正面的pcb工件点胶完成后,翻转装置带动定位治具翻转180度,使得原本位于背面的pcb工件翻转至正面;
19.s6、同时,第三上料装置将第三铆接件输送至第人铆压装置;
20.s7、点胶装置继续工作,对原本位于定位治具背面的pcb工件进行点胶;
21.s8、点胶完成后,定位治具在进料装置的作用下被输出至下一工序;
22.s9、重复以下工序。
23.本发明的pcba板自动翻转点胶设备能够实现连续生产以及进料、翻转、点胶等工作的自动进行,相对于人工手动操作方式,一方面可确保产量、品质,提升生产效率,另一方面,可节省人力,节约费用,确保生产连线,适用性强,能够满足客户需求。
24.在一些实施方式中,进料装置包括沿机体上端面的长度方向延伸的两条平行设置的皮带输送线,两条皮带输送线与定位治具限位配合且能够带动定位治具沿皮带输送线的长度方向运动,顶料装置设置于两条皮带输送线之间且位于定位治具的下方。由此,皮带输送线可满足连续进料以及出料要求,适用于连线生产。
25.在一些实施方式中,顶料装置包括顶升板和第一驱动件,第一驱动件安装于机体,顶升板安装于第一驱动件的驱动端且与定位治具相配合。由此,顶升板可在第一驱动件的驱动下顶升,便于后续的自动点胶和翻转。
26.在一些实施方式中,定位治具的底部开设有第一定位孔,顶升板的顶部设置有与第一定位孔相配合的第一定位柱。由此,第一定位孔和第一定位柱的配合,便于实现限位和定位,提高顶升过程的稳定性。
27.在一些实施方式中,翻转装置包括架设于皮带输送线的上方且位于机体两端部的第一定位机构和第二定位机构,第一定位机构包括第一安装架以及安装于第一安装架的第一定位组件,第二定位机构包括第二安装架以及安装于第二安装架的第二定位组件;
28.第一定位组件包括第二驱动件、第一安装块和第一定位件,第一定位件可转动地所述第一安装块,第一安装块可活动地安装于第一安装架且与第二驱动件的驱动端连接,在第二驱动件的驱动下,第一定位件能够远离或者靠近第二定位组件;
29.第二定位组件包括第三驱动件、第二安装块和第二定位件,第二定位件可转动地第二安装块,第二安装块可活动地安装于第二安装架且与第三驱动件的驱动端连接,在第三驱动件的驱动下,第二定位件能够远离或者靠近第二定位组件;
30.翻转装置还包括翻转驱动机构,翻转驱动机构与第一定位机构、第二定位机构的其中之一动力连接,用于驱动第一定位件、第二定位件的其中之一转动。
31.由此,翻转装置的工作原理为:当定位治具被顶升装置顶升到位后,第一定位组件和第二定位组件工作,驱动第一定位件和第二定位件相互靠近从两侧夹紧定位治具,此时点胶装置可对定位治具正面的pcb工件进行点胶,点胶完成后,点胶装置的点胶头复位,翻转驱动机构工作,带动第一定位件、第二定位件以及共同转动,完成180度自动翻转,便于实现定位治具两面pcb工件的点胶工作。
32.在一些实施方式中,翻转驱动机构与第一定位机构动力连接,翻转驱动机构包括第四驱动件、第三安装块和皮带传动组件,第三安装块安装于第一安装块,第四驱动件安装于第三安装块且通过皮带传动组件与第一定位件传动配合;
33.皮带传动组件包括第一传动轮、第二传动轮和传动带,第一传动轮可转动地安装于第三安装块且与第四驱动件的驱动端动力连接,第二传动轮可转动地安装于第一安装块且与第一定位件同轴,第一传动轮与第二传动轮之间通过传动带传动连接。
34.由此,翻转驱动机构的工作原理为:当需要对定位治具进行翻转时,第四驱动件驱动第一传动轮转动,第一传动轮通过传动带带动第二传动轮转动,进而带动同轴的第一定位件旋转,完成对定位治具的驱动,带动定位治具完成翻转。
35.在一些实施方式中,翻转装置还包括感应机构,感应机构包括相互配合的感应片和感应开关,感应片安装于第一定位件,感应开关安装于第一安装块。由此,感应机构的设置可实现翻转过程的精准定位,实现精准控制。
36.在一些实施方式中,定位治具的两侧开设有第二定位孔,第一定位件、第二定位件上设置有与第二定位孔相配合的第二定位柱。由此,第二定位孔和第二定位柱的配合,便于实现限位和定位,提高夹紧时的准确性,同时可提高翻转过程的稳定性。
37.在一些实施方式中,点胶装置包括多轴驱动机构和点胶机构,多轴驱动机构安装于机体,点胶机构安装于多轴驱动机构且位于翻转装置的上方,点胶机构用于对翻转装置处的定位治具内的pcb工件进行点胶,点胶机构包括多个点胶头。由此,多轴驱动机构可驱动点胶机构多轴方向运行,实现全自动点胶。
38.在一些实施方式中,pcba板自动翻转点胶设备还包括收胶装置,收胶装置安装于机体且与点胶头相配合,配置为对点胶头进行收胶。由此,收胶装置可对点胶完成后的点胶头进行收胶,避免污染。
39.本发明的有益效果:
40.本发明的pcba板自动翻转点胶设备能够实现连续生产以及进料、翻转、点胶等工作的自动进行,相对于人工手动操作方式,一方面可确保产量、品质,提升生产效率,另一方面,可节省人力,节约费用,确保生产连线,适用性强,能够满足客户需求。
附图说明
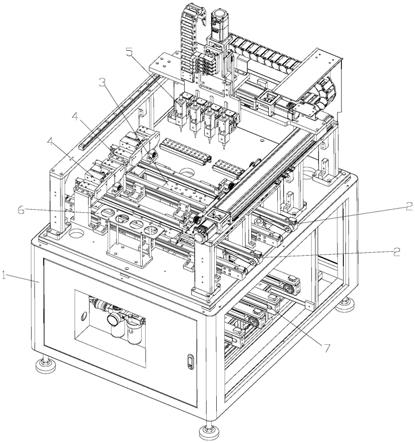
41.图1为本发明一实施方式的pcba板自动翻转点胶设备的立体结构示意图;
42.图2为图1所示的pcba板自动翻转点胶设备省略部分机构后的立体结构示意图之一;
43.图3为图1所示的pcba板自动翻转点胶设备省略部分机构后的立体结构示意图之二;
44.图4为本发明一实施方式的定位治具的立体结构示意图之一;
45.图5为本发明一实施方式的定位治具的立体结构示意图之二;
46.图6为图3所示的pcba板自动翻转点胶设备的进料装置、顶料装置以及其中一个翻转装置共同配合的立体结构示意图;
47.图7为图6所示的pcba板自动翻转点胶设备的进料装置、顶料装置以及挡料装置的立体结构示意图;
48.图8为图7所示的pcba板自动翻转点胶设备的顶料装置的立体结构示意图;
49.图9为图6所示的翻转装置的第一定位机构、翻转驱动机构以及感应机构的立体结构示意图;
50.图10为图9所示的翻转装置的a处的放大结构示意图
51.图11为图6所示的翻转装置的第二定位机构的立体结构示意图;
52.图12为图1所示的pcba板自动翻转点胶设备的点胶装置的立体结构示意图;
53.图13为图1所示的pcba板自动翻转点胶设备的回转输送装置的立体结构示意图。
54.图1~13中的附图标记:1-机体;2-进料装置;3-顶料装置;4-翻转装置;5-点胶装置;6-收胶装置;7-回转输送装置;8-挡料装置;10-定位治具;20-pcb工件;21-皮带输送线;31-顶升板;32-第一驱动件;41-第一定位机构;42-第二定位机构;43-翻转驱动机构;44-感应机构;51-多轴驱动机构;52-点胶机构;81-挡块;82-第五驱动件;101-第一定位孔;102-第二定位孔;311-第一定位柱;411-第一安装架;412-第一定位组件;421-第二安装架;422-第二定位组件;431-第四驱动件;432-第三安装块;433-皮带传动组件;441-感应片;442-感应开关;521-点胶头;4121-第二驱动件;4122-第一安装块;4123-第一定位件;4221-第三驱动件;4222-第二安装块;4223-第二定位件;4331-第一传动轮;4332-第二传动轮;4123a-第二定位柱。
具体实施方式
55.下面结合附图对本发明作进一步详细的说明。
56.图1~13示意性地显示了根据本发明的一种实施方式的pcba板自动翻转点胶设备。
57.如图1~13所示,该pcba板自动翻转点胶设备至少包括:
58.机体1;
59.进料装置2,安装于机体1,配置为输入可承载pcb工件20的定位治具10;
60.顶料装置3,安装于机体1,配置为顶升定位治具10;
61.翻转装置4,安装于机体1且与顶料装置3相配合,配置为对顶料装置3顶升的定位治具10进行翻转;
62.点胶装置5,安装于机体1且与翻转装置4相配合,配置为对定位治具10内的pcb工件20进行点胶。
63.如图1~7所示,进料装置2包括沿机体1上端面的长度方向延伸的两条平行设置的皮带输送线21,两条皮带输送线21与定位治具10限位配合且能够带动定位治具10沿皮带输送线21的长度方向运动,顶料装置3设置于两条皮带输送线21之间且位于定位治具10的下方。由此,皮带输送线21可满足连续进料以及出料要求,适用于连线生产。
64.本实施方式的进料装置2为两个,两个进料装置2并排设置,可同时实现两条进料输送线,大幅提高生产效率。
65.如图8所示,顶料装置3包括顶升板31和第一驱动件32,第一驱动件32安装于机体1,顶升板31安装于第一驱动件32的驱动端且与定位治具10相配合。由此,顶升板31可在第一驱动件32的驱动下顶升,便于后续的自动点胶和翻转。
66.定位治具10的底部开设有第一定位孔101,顶升板31的顶部设置有与第一定位孔101相配合的第一定位柱311。由此,第一定位孔101和第一定位柱311的配合,便于实现限位和定位,提高顶升过程的稳定性。
67.本实施方式的pcba板自动翻转点胶设备还包括挡料装置8,挡料装置8安装于机体1且位于顶料装置3的侧方,本实施方式的挡料装置8设置于顶料装置3的右侧,包括第五驱动件82以及与第五驱动件82动力连接且与所述定位治具10相配合的挡块81。本实施方式的第一驱动件32和第五驱动件82可以为伸缩气缸。
68.如图8~10所示,翻转装置4包括架设于皮带输送线21的上方且位于机体1两端部的第一定位机构41和第二定位机构42,第一定位机构41包括第一安装架411以及安装于第一安装架411的第一定位组件412,第二定位机构42包括第二安装架421以及安装于第二安装架421的第二定位组件422;
69.第一定位组件412包括第二驱动件4121、第一安装块4122和第一定位件4123,第一定位件4123可转动地所述第一安装块4122,第一安装块4122可活动地安装于第一安装架411且与第二驱动件4121的驱动端连接,在第二驱动件4121的驱动下,第一定位件4123能够远离或者靠近第二定位组件422;
70.第二定位组件422包括第三驱动件4221、第二安装块4222和第二定位件4223,第二定位件4223可转动地第二安装块4222,第二安装块4222可活动地安装于第二安装架421且与第三驱动件4221的驱动端连接,在第三驱动件4221的驱动下,第二定位件4223能够远离或者靠近第二定位组件422;
71.翻转装置4还包括翻转驱动机构43,翻转驱动机构43与第一定位机构41、第二定位机构42的其中之一动力连接,用于驱动第一定位件4123、第二定位件4223的其中之一转动。
72.由此,翻转装置4的工作原理为:当定位治具10被顶升装置顶升到位后,第一定位组件412和第二定位组件422工作,驱动第一定位件4123和第二定位件4223相互靠近从两侧夹紧定位治具10,此时点胶装置5可对定位治具10正面的pcb工件20进行点胶,点胶完成后,点胶装置5的点胶头521复位,翻转驱动机构43工作,带动第一定位件4123、第二定位件4223以及共同转动,完成180度自动翻转,便于实现定位治具10两面pcb工件20的点胶工作。
73.翻转驱动机构43与第一定位机构41动力连接,翻转驱动机构43包括第四驱动件431、第三安装块432和皮带传动组件433,第三安装块432安装于第一安装块4122,第四驱动件431安装于第三安装块432且通过皮带传动组件433与第一定位件4123传动配合;
74.皮带传动组件433包括第一传动轮4331、第二传动轮4332和传动带,第一传动轮4331可转动地安装于第三安装块432且与第四驱动件431的驱动端动力连接,第二传动轮4332可转动地安装于第一安装块4122且与第一定位件4123同轴,第一传动轮4331与第二传动轮4332之间通过传动带传动连接。由此,翻转驱动机构43的工作原理为:当需要对定位治具10进行翻转时,第四驱动件431驱动第一传动轮4331转动,第一传动轮4331通过传动带带动第二传动轮4332转动,进而带动同轴的第一定位件4123旋转,完成对定位治具10的驱动,带动定位治具10完成翻转。
75.本实施方式的第二驱动件4121、第三驱动件4221可以为伸缩气缸,第四驱动件431可以为电机。
76.如图9所示,翻转装置4还包括感应机构44,感应机构44包括相互配合的感应片441和感应开关442,感应片441安装于第一定位件4123,感应开关442安装于第一安装块4122。由此,感应机构44的设置可实现翻转过程的精准定位,实现精准控制。本实施方式的感应开关442可以为光电开关。
77.定位治具10的两侧开设有第二定位孔102,第一定位件4123、第二定位件4223上设置有与第二定位孔102相配合的第二定位柱4123a。由此,第二定位孔102和第二定位柱4123a的配合,便于实现限位和定位,提高夹紧时的准确性,同时可提高翻转过程的稳定性。
78.点胶装置5包括多轴驱动机构51和点胶机构52,多轴驱动机构51安装于机体1,点
胶机构52安装于多轴驱动机构51且位于翻转装置4的上方,点胶机构52用于对翻转装置4处的定位治具10内的pcb工件20进行点胶,点胶机构52包括多个点胶头521。本实施方式的多轴驱动机构51为三轴驱动机构,可由直线导轨、滑块、直线驱动电机等结构组成,实现两轴方向的运行,再加上用于驱动点胶机构52升降的升降驱动气缸,可以实现三轴方向驱动。由此,多轴驱动机构51可驱动点胶机构52多轴方向运行,实现全自动点胶。
79.pcba板自动翻转点胶设备还包括收胶装置6,收胶装置6安装于机体1且与点胶头521相配合,配置为对点胶头521进行收胶。本实施方式的收胶装置6包括安装于机体1的架体以及安装于架体底部的收胶盒等收胶器件。架体上开设有与点胶头521对应数量的开孔,点胶头521可穿过开孔。由此,收胶装置6可对点胶完成后的点胶头521进行收胶,避免污染。
80.pcba板自动翻转点胶设备还包括回转输送装置7,回转输送装置7安装于机体1且位于机体1上端面的底部,本实施方式的回转输送装置7为回转输送线,可以为链条传动带或者皮带传动带组成。该回转输送线的输送方向与进料装置2的输送方向相反,配置为对进行需要重新点胶的pcb工件20进行回传,重新回到进料装置2的进料端。
81.本实施方式的pcba板自动翻转点胶设备还包括控制装置。进料装置2、顶料装置3、翻转装置4、点胶装置5、收胶装置6、回转输送装置7、挡料装置8等均与控制装置电性连接。本实施方式的控制装置可以为工业电脑或者plc控制器等。
82.本发明提供了一种全新结构的pcba板自动翻转点胶设备,该pcba板自动翻转点胶设备的工作运行原理如下:
83.s1、进料装置2将承载有pcb工件20的定位治具10输入至顶料装置3的上方;
84.s2、顶料装置3工作,向上将定位治具10顶升;
85.s3、翻转装置4工作,先将定位治具10夹紧,顶料装置3复位;
86.s4、点胶装置5工作,对定位治具10正面的pcb工件20进行点胶;
87.s5、定位治具10正面的pcb工件20点胶完成后,翻转装置4带动定位治具10翻转180度,使得原本位于背面的pcb工件20翻转至正面;
88.s6、同时,第三上料装置将第三铆接件输送至第人铆压装置;
89.s7、点胶装置5继续工作,对原本位于定位治具10背面的pcb工件20进行点胶;
90.s8、点胶完成后,定位治具10在进料装置2的作用下被输出至下一工序;
91.s9、重复以下工序。
92.本发明的pcba板自动翻转点胶设备能够实现连续生产以及进料、翻转、点胶等工作的自动进行,相对于人工手动操作方式,一方面可确保产量、品质,提升生产效率,另一方面,可节省人力,节约费用,确保生产连线,适用性强,能够满足客户需求。
93.以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1