一种机器人3D视觉汽车冲压件涂胶系统的制作方法
一种机器人3d视觉汽车冲压件涂胶系统
技术领域
1.本实用新型涉及汽车配件制造及涂胶领域,具体涉及一种机器人3d视觉汽车冲压件涂胶系统。
背景技术:
2.在汽车装配制造行业中,汽车的车门、发动机罩盖和行李箱盖等冲压件原来是将内外盖板折边后点焊连接的,但是这种工工艺使车身表面增添了许多由焊接而造成的凹坑,严重影响了车身的外观质量。为了解决这个问题,现在一般采用粘接取代点焊的方法来生产汽车车门、发动机罩和行李箱的折边结构,这类汽车冲压件在生产过程中需要对折边进行涂胶。目前的汽车冲压件涂胶工序大多由人工来完成,费时费力且质量不均。
3.中国专利申请号2011205717.5公开了一种汽车冲压总成件涂胶系统,包括涂胶枪和用于承载汽车冲压总成件的工作台,工作台包括下支架和用于支撑车门的上支架,上支架与下支架转动连接,先将汽车冲压件放置在工作台上,涂胶的操作人员,根据需要涂胶的宽度来选择带有不同宽度限宽夹片的枪头套,套到涂胶枪上对车门进行涂胶,涂胶的操作人员在涂胶过程中无需走动,只需旋转上支架来调整汽车冲压总成件的位置。这种涂胶系统虽然设计了可旋转移动的工作台,但是涂胶的过程还是通过人工来完成的,工作效率仍然比较低下。
4.随着绿色环保和改善劳动者的工作环境要求越来越高,促使汽车装配制造商对新技术的尝试与使用。因此,使用搭载三维视觉传感器的机器人涂胶技术势在必行,汽车涂胶系统的研究与开发对我国汽车装配产业来说具有巨大的经济价值和社会效益。在汽车装配行业里涂胶机器人已经应用于生产中,因此生产研究一种基于机器人的自动涂胶系统是一个具有挑战性的问题。
技术实现要素:
5.本实用新型的目的是针对上述现有技术的不足,而提供一种机器人3d视觉汽车冲压件涂胶系统,利用视觉引导机器人自动涂胶,可以使汽车冲压件随意摆放也能实现扫描涂胶,提高工作效率。
6.为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种机器人3d视觉汽车冲压件涂胶系统,包括基座和用于放置汽车冲压件的台架,所述基座上安装有涂胶机器人,所述涂胶机器人的末端设有胶枪和用于对待涂胶的汽车冲压件进行扫描的三维传感器,涂胶机器人由机器人控制柜控制,所述三维传感器和机器人控制柜均与工控机控制连接,所述工控机根据所述三维传感器的扫描信息控制涂胶机器人对汽车冲压件进行涂胶。
7.在本实用新型另一个实施例中,所述台架的一侧设有用于固定夹紧汽车冲压件的夹持装置。
8.在本实用新型另一个实施例中,所述夹持装置包括夹紧块及驱动夹紧块移动的驱
动机构,所述驱动机构为电动缸或者气缸。
9.在本实用新型另一个实施例中,所述驱动机构为气缸,所述气缸与一控制其开合的气控阀连接,所述气控阀通过所述机器人控制柜与工控机控制连接。
10.在本实用新型另一个实施例中,所述台架的侧边处设有滑槽,所述夹持装置设置于滑槽中。
11.在本实用新型另一个实施例中,所述三维传感器包括相机和用于相机拍摄时提供光源的线性激光发射器,所述相机和线性激光发射器均与工控机通讯连接。
12.本实用新型的有益效果是:本实用新型的机器人3d视觉汽车冲压件涂胶系统通过三维传感器拍摄汽车冲压件的二维和三维数据,并结合工控机自动涂胶轨迹生成算法,可以实现快速、精确引导涂胶机器人完成汽车冲压件涂胶,最终达到提高生产效率和节约人力成本的目的。
附图说明
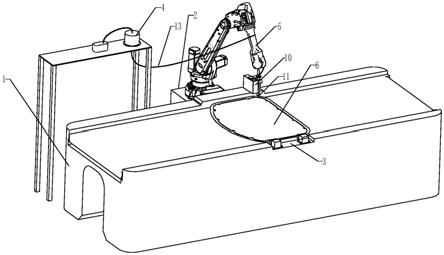
13.图1是本实用新型机器人3d视觉汽车冲压件涂胶系统实施例的结构示意图;
14.图2是台架实施例的结构示意图;
15.图3是三维传感器、胶枪和储胶装置的连接关系图;
16.图4是三维传感器和胶枪的放大图。
具体实施方式
17.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。附图中给出了本实用新型的较佳的实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本说明书所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容的理解更加透彻全面。
18.需要说明的是,除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。术语“中心”、“底部”“顶部”“内”“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅仅是为便于描述本实用新型和简化描述,而不是指示或暗指所指的部件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
19.如图1
‑
4所示为本实用新型机器人3d视觉汽车冲压件涂胶系统的结构示意图,由图可知,本系统包括台架1和基座2,台架1上可用于稳定固定多种特定型号汽车冲压件6,基座2上安装有涂胶机器人5,该涂胶机器人为六自由度工业机器人;涂胶机器5人的末端通过连接件12与胶枪11和用于对待涂胶的汽车冲压件进行信息扫描的三维传感器10连接,涂胶机器人5由机器人控制柜(图中未示出)控制,三维传感器10和机器人控制柜均与工控机控制连接,胶枪11通过胶管13和储胶装置4相连,工控机根据三维传感器10的扫描信息控制涂胶机器人对汽车冲压件6进行涂胶。
20.优选地,如图1
‑
2所示,本实施例的台架1为条形工作台,两侧均具有向上翻的台沿,在与基座2相对的那侧台沿中部设有滑槽8,滑槽中设置有夹持装置3。
21.进一步地,如图2所示,本实施例的夹持装置3包括夹紧块7及驱动夹紧块沿台架宽度方向移动的驱动机构,以用于夹紧或者松开汽车冲压件6,当然,根据汽车冲压件的实际情况,其宽度差别较大,可以很据需要更换或者调节夹紧块与驱动机构之间的连接件。
22.优选地,该驱动机构为电动缸或者气缸,当然也可以采用其他类型的驱动机构,这里不再一一赘述。
23.优选地,本实施例的驱动机构选用气缸9,该气缸与一控制其开合的气控阀连接,该气控阀通过机器人控制柜与工控机控制连接。本实施例的气缸是固定在滑槽的固定位置,根据实际情况,结合汽车冲压件的大小和宽窄,如果有需要,可以在滑槽底部设置对应的自动驱动装置,用于驱动气缸带动加紧块7可沿台架长度延伸方向左右移动,以调节两组夹持装置之间的间距。
24.优选地,如图3所示,本实施例的三维传感器10包括相机和用于相机拍摄时提供光源的线性激光发射器,相机和线性激光发射器均与工控机通讯连接。
25.本实施例的机器人3d视觉汽车冲压件涂胶系统的工控机中设有机器人涂胶路径规划模块,该模块包括:数据采集单元,用于采集汽车冲压件的三维数据点云;特征匹配单元,用于匹配识别出汽车冲压件的型号和位姿特征;路径规划单元,用于生成机器人涂胶轨迹;信息交互单元,用于将计算出的数据发送给涂胶机器人,令涂胶机器人完成执行相应涂胶动作。
26.本实用新型机器人3d视觉汽车冲压件涂胶系统的工作原理如下:首先将待涂胶的汽车冲压件放在台架1上,并通过夹持装置3使其稳定固定在涂胶工位;工控机再通过机器人控制柜发送信号给气控阀,气控阀打开,驱动气缸9工作,夹持装置在气缸的作用下稳定夹持住汽车冲压件6。
27.调整三维传感器拍摄位置:工控机收到完成夹持的信息后,首先发送拍照信息给涂胶机器人5,涂胶机器人运动至预先示教好的位置;当涂胶机器人已经到达可拍照位置,会给工控机回复允许拍照的信息,接着工控机发送触发三维传感器开始拍照。
28.规划涂胶轨迹:工控机中的汽车冲压件涂胶路径规划模块在接收到拍照触发时,数据采集单元控制三维传感器拍摄、计算出点云数据,并开始去噪、降采样计算,去除干扰计算的数据;特征匹配单元将预先制作好的模板点云与即时采集点云做目标匹配,识别出需要涂胶的点位信息;路径规划单元会依据特征匹配单元识别出的涂胶点位信息,生成一条涂胶机器人可执行的涂胶轨迹;最后,信息交互单元将计算出的数据发送给涂胶机器人,令涂胶机器人完成执行相应涂胶动作。
29.使用胶枪涂胶:当涂胶机器人运动到规划出的涂胶位置后,胶枪开始工作进行涂胶。
30.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1