一种风机塔筒攀爬清洗机器人用除锈喷漆装置的制作方法
1.本发明涉及机器人技术领域,具体为一种风机塔筒攀爬清洗机器人用除锈喷漆装置。
背景技术:
2.风力发电机组结构复杂,其中风电塔筒是风力发电的塔杆,在风力发电机组中主要起支撑作用,同时吸收机组震动。在运输安装过程中塔筒表面难免发生剐蹭防腐层被破坏,随着风电机组运行时间越来越长,油漆剥落塔筒锈蚀的情况日益严重,不仅影响风电机组的美观,还会使得塔筒的结构强度和寿命降低,甚至出现塔筒因为应力变形等原因而出现塔筒倒塌的风险。
3.这对风电维护提出了更高的要求。目前针对风电塔筒的除锈、补漆均是以高空作业“蜘蛛人”为主,但是人工高空作业风险大,一旦有人员坠落后果不堪设想。人工作业效率低、效果参差不齐,在作业过程中停机时间长,发电损失大,隐性成本高,实用性差,为此,我们提出一种风机塔筒攀爬清洗机器人用除锈喷漆装置。
技术实现要素:
4.本发明的目的在于提供一种风机塔筒攀爬清洗机器人用除锈喷漆装置,以解决上述背景技术中提出的风电塔筒的除锈、补漆采用人工高空作业风险大,效率低、效果参差不齐的问题。
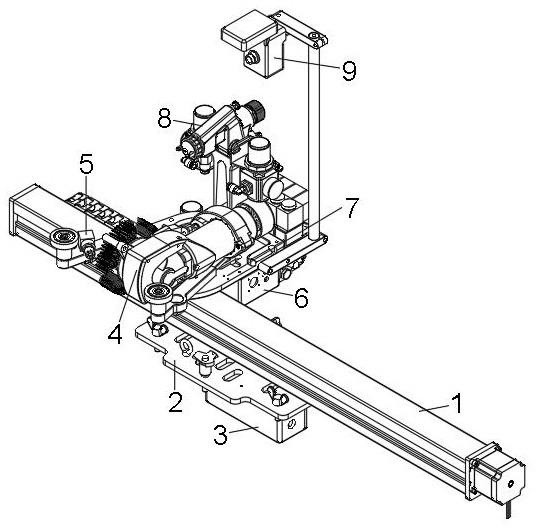
5.为实现上述目的,本发明提供如下技术方案:一种风机塔筒攀爬清洗机器人用除锈喷漆装置,包括快装主板、直线滑台、随动平台、自动喷枪、电动打磨机、主控制盒、阀组控制盒、摄像头和攀爬机器人,所述攀爬机器人通过快装主板连接有除锈喷漆装置,所述随动平台位于直线滑台上,且随动平台上通过转接底板安装有摄像头,所述转接底板下设有阀组控制盒和阀组,所述阀组的右侧设有调压阀,所述转接底板上安装有定向导轨槽和伸缩平台,且伸缩平台上安装有旋转平台,所述旋转平台上安装有电动打磨机和自动喷枪,且电动打磨机通过间隙调整机构安装在旋转平台上,所述伸缩平台的右前方安装有高压气嘴。
6.优选的,所述直线滑台固定安装在快装主板上,所述直线滑台上有伺服电机,且伺服电机的输出端通过联轴器连接有滚珠丝杠,所述滚珠丝杠上有活动滑台。
7.优选的,所述阀组由四个电磁阀组成,且阀组进气端有气管连接空压机,四个所述电磁阀的出气端分别连接自动喷枪、高压气嘴和伸缩平台的进气端。
8.优选的,所述旋转平台上设有限位杆,所述伸缩平台的前方左右分别装有左导向轮、右导向轮,且左导向轮和右导向轮对称设置,所述左导向轮和右导向轮贴合塔筒表面,所述伸缩平台的后方设有后方导向轮。
9.优选的,所述电动打磨机的一侧设有加速轴,且电动打磨机的输出端设有钢丝盘刷。
10.与现有技术相比,本发明的有益效果是:本发明能够对塔筒表面大面积高效率的除锈喷漆,能解决一般除锈喷漆机构不能自适应塔筒的直径变化的缺点,从而能够配合风电塔筒攀爬机器人更可靠、更智能更高效地作业,解决了现有人工除锈喷漆作业风险大、成本高、效率低的缺点,同时除锈喷漆功能二合一将大大提高作业效率,避免除锈和喷漆间隔过长导致塔筒表面重新生锈。
附图说明
11.图1为本发明的结构示意图;图2为本发明安装在攀爬机器人上的示意图;图3为本发明等轴测示意图;图4为本发明快装主板和主控制盒等轴测结构示意图;图5为本发明随动平台等轴测示意图;图6为本发明初始位置示意图;图7为本发明压紧位置示意图。
12.图中:1、直线滑台;2、快装主板;3、主控制盒;4、电动打磨机;5、高压气嘴;6、阀组控制盒;7、随动平台;8、自动喷枪;9、摄像头;10、攀爬机器人;11、除锈喷漆装置;12、阀组;13、调压阀;14、伸缩平台;15、旋转平台;17、加速轴;18、间隙调整机构;19、左导向轮;20、右导向轮;21、限位杆;22、定向导轨槽;24、后方导向轮;25、钢丝盘刷;26、塔筒表面。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.实施例:请参阅图1-7,本发明提供一种技术方案:一种风机塔筒攀爬清洗机器人用除锈喷漆装置,包括快装主板2、直线滑台1、随动平台7、自动喷枪8、电动打磨机4、主控制盒3、阀组控制盒6、摄像头9和攀爬机器人10,攀爬机器人10通过快装主板2连接有除锈喷漆装置11,随动平台7位于直线滑台1上,随动平台7上的转接底板固定在直线滑台1上,随直线滑台1左右横向位移,且随动平台7上通过转接底板安装有摄像头9,转接底板下设有阀组控制盒6和阀组12,阀组12的右侧设有调压阀13(调压阀13保证伸缩平台14前伸和收回的压力恒定),转接底板上安装有定向导轨槽22和伸缩平台14,由电磁阀控制压缩气体实现伸缩平台14的前伸和收回,且伸缩平台14上安装有旋转平台15,旋转平台15上安装有电动打磨机4和自动喷枪8,且电动打磨机4通过间隙调整机构18安装在旋转平台15上,间隙调整机构18可以方便调节电动打磨机4的前后位移,伸缩平台14的右前方安装有高压气嘴5,高压气嘴5可喷出高压气体,自动喷枪8由pu软管供气供漆,油漆由压缩气体压送后经过喷枪前端雾化帽雾化喷出。
15.其中,直线滑台1固定安装在快装主板2上,直线滑台1上有伺服电机,且伺服电机的输出端通过联轴器连接有滚珠丝杠,滚珠丝杠上有活动滑台,通过伺服电机驱动滚珠丝
杠使直线滑台1左右移动。
16.阀组12由四个电磁阀组成,且阀组12进气端有气管连接空压机,四个电磁阀的出气端分别连接自动喷枪8、高压气嘴5和伸缩平台14的进气端,通过连接空压机进气,四个电磁阀分别控制自动喷枪8的开关,高压气嘴5的开关以及伸缩平台14的前伸和收回。
17.旋转平台15上设有限位杆21,伸缩平台14的前方左右分别装有左导向轮19、右导向轮20,且左导向轮19和右导向轮20对称设置,左导向轮19和右导向轮20贴合塔筒表面26,伸缩平台14的后方设有后方导向轮24,旋转平台15在限位杆21的限制下可在设计范围内左右旋转(伸缩平台14收回至末端且旋转平台15与伸缩方向共线时定义为初始位置)。
18.电动打磨机4的一侧设有加速轴17,且电动打磨机4的输出端设有钢丝盘刷25,电动打磨机4由电机驱动钢丝盘刷25高速旋转,钢丝先经过加速轴17压弯后瞬间弹出撞击塔筒表面26清除表面的漆皮、铁锈层。
19.工作原理:在使用本发明时,首先,将除锈喷漆装置11通过快装主板2固定在攀爬机器人10上。调节间隙调整机构18确保电动打磨机4的钢丝盘刷25在左导向轮19、右导向轮20接触塔筒后可以刷到塔筒表面26,除锈喷漆装置11连接上气管、漆管以及电缆后操控机器人爬升至塔筒上需要除锈喷漆的位置,摄像头9识别有剥落锈蚀的区域后自动规划攀爬机器人10攀爬和除锈喷漆装置11位移路径,路径规划完毕开始自动作业。
20.首先是除锈作业:伸缩平台14在阀组12控制下向后收回,此时后方导向轮24会滑入定向导轨槽22直至进入圆点此时旋转平台15处于初始位置,电动打磨机4电机启动驱动钢丝盘刷25高速旋转,伸缩平台14在阀组12控制下向前伸出,前伸时前方左导向轮19、右导向轮20一侧先与塔筒弧面接触,在前伸压力作用下旋转平台15向先接触侧方向转动直至另一侧导向轮与塔筒弧面接触(在限位杆21的限制下不会超出旋转范围)。此时左导向轮19、右导向轮20塔筒弧面接触圆相切,此时旋转平台15中线垂直于塔筒弧面指向塔筒圆心同时安装在旋转平台15上面的电动打磨机4也垂直于塔筒弧面指向塔筒圆心,钢丝盘刷25经过加速轴17加速后垂直撞击塔筒表面26清除表面的漆皮、铁锈层(此时定义为压紧位置)。维持前伸压力保持压紧位置,根据规划路径直线滑台1左或右横移,横移过程中旋转平台15、左导向轮19和右导向轮20沿塔筒弧面滚动,旋转平台15在压力和导向轮作用下中线始终垂直于塔筒弧面指向塔筒圆心保证钢丝盘刷25始终以恒定压力垂直撞击塔筒表面26,以达到自由适应塔筒的弧面变化打磨效果稳定如一。打磨同时高压气嘴5对钢丝盘刷25撞击区域喷出高压气体,一是吹除打磨时产生的灰尘以免附着在塔筒表面26影响后续喷漆效果,二是对钢丝盘刷26降温,延长对钢丝盘刷26的使用寿命,按原有规划路径移动直至全部除锈完成。
21.打磨完一块区域后除锈作业完成自动进入喷漆作业,攀爬机器人10和除锈喷漆装置11移动至开始除锈的起始位置,伸缩平台14在阀组12控制下向后收回,此时后方导向轮24会滑入定向导轨槽22直至进入圆点此时旋转平台15处于初始位置,保持压力使旋转平台15一直处于初始位置,下方连接的油漆泵开始向自动喷枪泵送油漆,电磁阀控制自动喷枪8开启雾化喷漆,按原有规划路径移动直至打磨完的区域全部喷涂完成。到此该区域除锈喷漆作业完成,操作攀爬机器人10行使至其他区域再次开始作业。
22.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1