一种多成分药物柔性制备与质量控制装置及方法
1.本发明属于药物制备装置技术领域,具体涉及一种多成分药物柔性制备与质量控制装置,同时还涉及该多成分药物柔性制备与质量控制装置的方法。
背景技术:
2.药物试样样品制备包括实验的智能化设计和实施,以及在不同成分和加工条件下对潜在成分与工艺的搜索和优化。样品制备后,需要在较短的时间内利用技术来获取样品信息。然后对性能相对较高的样品行详尽研究,以加速整个实验过程。从实验科学方面来看,药物试样样品制备对于生物、医药领域意义重大。
3.但目前在药物试样样品制备方面存在着一定的瓶颈,多采用人工进行药物试样样品制备,在药物试样样品制备过程中,需要实验人员花费相当大的精力与时间去完成制备,不仅效率低下,在对风险性样品制备过程中,还极易对实验人员的身体健康及安全造成危害。
技术实现要素:
4.为了解决样品制备存在的耗时、繁琐、精度不高,甚至带有风险性的问题,本发明提供了一种能够进行药物粉末混合制备、药物粉末溶液混合制备、溶液混合制备、制备精度高、大幅度降低药物制备风险性的多成分药物柔性制备与质量控制装置,同时提供了相应的方法。
5.基于上述目的,本发明通过如下技术方案实现:一种多成分药物柔性制备与质量控制装置,包括粉末定量加样混合系统、与粉末定量加样混合系统电性连接的控制器,粉末定量加样混合系统的两侧分别设有与粉末定量加样系统相配合的容器递送系统、溶液混合系统,粉末定量加样混合系统上设有与容器递送系统、溶液混合系统相配合的机械手模块,机械手模块、容器递送系统、溶液混合系统均与控制器电性连接。
6.优选地,容器递送系统包括递送升降台,递送升降台上设有递送旋转台,递送旋转台上设有输送盘,输送盘的顶面外周均布有间隙配合的容器凹槽。
7.优选地,递送升降台远离粉末定量加样混合系统的一侧设有递送支架,递送支架上设有递送直线推杆,递送直线推杆的活动端设有与输送盘间隙配合的递送抓手,递送抓手上设有与递送抓手相配合的递送舵机,递送抓手与容器凹槽相配合。
8.优选地,粉末定量加样混合系统包括混合支架,混合支架的上部设有竖直驱动单元,竖直驱动单元上设有旋转驱动单元,旋转驱动单元与设置在混合支架下部的水平滑台相配合,水平滑台上设有送粉安装板,送粉安装板上设有至少一个送粉头,送粉头的一侧设有送粉开关,送粉开关上设有与旋转驱动单元相配合的送粉开关槽,送粉开关槽设为六角开关槽。送粉开关槽控制送粉开关的开启或关闭,同时根据旋转驱动单元的旋转对送粉开关的流量进行精准调节
优选地,竖直驱动单元上设有与旋转驱动单元相连接的电机转接板,旋转驱动单元上设有与控制器电性连接的编码器;混合支架的一侧设有与旋转驱动单元、递送抓手相配合的电子秤,电子秤设置在水平滑台下方与水平滑台、送粉头间隙配合;递送升降台上设有与递送升降台相配合的递送锁紧螺丝。
9.优选地,竖直驱动单元包括竖直驱动电机,竖直驱动电机的活动端连接有竖直驱动螺杆,竖直驱动螺杆通过竖直驱动轴承与混合支架相连接,竖直驱动螺杆上设有与电机转接板相连接的竖直驱动块,竖直驱动块与竖直驱动螺杆螺纹连接;旋转驱动单元包括旋转驱动电机,旋转驱动电机的活动端连接有与送粉开关槽相配合的旋转驱动杆,旋转驱动杆通过旋转驱动轴承与电机转接板相连接;水平滑台包括水平驱动电机,水平驱动电机的活动端连接有水平驱动螺杆,水平驱动螺杆上设有与送粉安装板相连接的水平驱动块,水平驱动块与水平驱动螺杆螺纹连接;水平驱动螺杆通过水平驱动轴承与混合支架相连接。
10.优选地,机械手模块包括机械手升降台,机械手升降台上设有机械手旋转台,机械手旋转台上设有机械手直线推杆,机械手直线推杆的活动端设有机械手舵机ⅰ,机械手舵机ⅰ远离机械手直线推杆的一侧设有间隙配合的机械手舵机ⅲ、机械手抓手,机械手舵机ⅲ设置在机械手抓手正上方;机械手抓手上设有与机械手抓手相配合的机械手舵机ⅱ。
11.优选地,机械手舵机ⅲ上设有与机械手舵机ⅲ相配合的舵机调节臂,舵机调节臂上设有与舵机调节臂相连接的容器盖,舵机调节臂上设有与容器盖相连接的容器转轴,容器转轴通过舵机调节臂与机械手舵机ⅲ相配合;机械手抓手与旋转驱动单元、送粉头相配合;机械手升降台上设有与机械手升降台相配合的调节旋钮、机械手锁紧螺丝。
12.优选地,溶液混合系统包括溶液支架,溶液支架上设有与机械手抓手相配合的溶液混合容器,溶液混合容器上设有入液口,入液口通过输液管连接有溶液输送泵,溶液混合容器的正下方设置有与溶液混合容器相配合的超声波振动仪;溶液支架上设有与溶液混合容器相配合的三维运动平台,三维运动平台底端设有与溶液混合容器相配合的测量模块;溶液混合容器为溶液混合容器。
13.优选地,测量模块包括设置在三维运动平台底端与控制器电性连接的ph计、温度计、电导率传感器;溶液支架上设有与溶液混合容器相配合的液位传感器,液位传感器与控制器电性连接。
14.根据上述多成分药物柔性制备与质量控制装置的方法,步骤包括:步骤一:药物制备前的准备;当需要制备样品时,首先调整容器递送系统中递送升降台的高度,在到达所需高度之后,转动递送锁紧螺丝对递送升降台高度进行固定,而后调整粉末定量加样混合系统的机械手模块中机械手升降台的高度,转动调节旋钮,在到达所需高度之后,转动机械手锁紧螺丝对机械手升降台高度进行固定;步骤二:药物混合模式的选择;递送升降台、机械手升降台的高度调整完成后,打开控制器,根据需要选择药物粉末混合、药物粉末溶液混合、药物溶液混合三种模式,模式选择完成后,输入所需药物粉末以及溶液的品类和用量,本装置会根据选择的模式启动不同的系统,通过控制器选择开始命令;在药物粉末混合模式下,容器递送系统、粉末定量加样混合系统及控制器配合工
作;在粉末溶液混合模式下,容器递送系统、粉末定量加样混合系统、溶液混合系统及控制器配合工作;在溶液混合模式下,溶液混合系统及控制器配合工作;控制器根据选择的模式选择合适的步骤对药物粉末试样进行制备;相关系统的电机与传感器参数均会传输到控制器中,控制器依据这些参数,实现对整个装置的精准控制;步骤三:容器递送系统的运行;在容器递送系统的输送盘的容器凹槽放置样品容器,控制器控制递送旋转台以合适的速率转动,待样品容器随输送盘转至递送抓手处递送旋转台停止,递送支架上的递送直线推杆伸展,带动递送抓手移动到样品容器处,递送抓手到达后其两侧恰好包住样品容器,递送舵机控制递送抓手闭合,使递送抓手夹住样品容器,控制器控制递送直线推杆继续伸展,递送抓手随之移动,将样品容器送至电子秤平台上,递送抓手在递送舵机的作用下松开,样品容器安稳放在电子秤平台上;步骤四:粉末定量加样混合系统的运行;待样品容器到达电子秤平台之后,粉末定量加样混合系统在控制器的作用下启动;旋转驱动单元由竖直驱动单元控制其在z方向的自由移动;水平滑台驱动不同的送粉头移动到样品容器正上方,而后竖直驱动单元驱动电机转接板上的旋转驱动单元向下移动,旋转驱动单元向下移动到达送粉开关槽,旋转驱动单元通过旋转送粉开关槽控制送粉头的送粉开关,当送粉开关槽完全锁死的时候,送粉头不出粉,当送粉开关槽微松,粉末开始从送粉头下面流出,落到样品容器中,粉末的流出速度与送粉开关槽的松紧正相关;样品容器中粉末的质量通过电子秤称量,为了更精准的控制粉末质量,在粉末质量将要达到要求质量时,由控制器依据编码器的读数拉紧送粉头的送粉开关槽,对将达到要求质量时依然流出的粉末进行提前预估;如果需要多个种类粉末,装置会重复上述相关操作;粉末制备完成后,粉末定量加样混合系统的机械手模块启动,机械手直线推杆伸展带动机械手抓手沿y方向移动,待机械手抓手到达电子秤平台之后,机械手抓手的两侧恰好包住样品容器,机械手舵机ⅱ控制机械手抓手闭合,对样品容器进行夹持,抓紧样品容器后,控制器控制机械手抓手往回移动到初始位置;机械手抓手正上方的机械手舵机ⅲ启动,带动舵机调节臂转动,容器盖随舵机调节臂移动,将容器盖扣紧在样品容器上,而后,机械手舵机ⅰ转动,使样品容器内的粉末混合均匀,再经过一定时间,机械手舵机ⅲ启动,拿掉容器盖;此时,由控制器根据之前输入的指令决定是否进行溶液制备,如果不需要,那么此时所需的药物粉末样品已经制备完成,如果需要进行溶液制备,需要进行溶液混合系统的操作;步骤五:溶液混合系统的运行;控制器控制机械手旋转台转动,机械手旋转台带动机械手抓手抓着样品容器来到溶液混合容器上方,机械手舵机ⅰ旋转一定角度,带动样品容器旋转,使粉末慢慢倒入溶液混合容器中,溶液输送泵连接输液管通过入液口向溶液混合容器灌输溶液,由液位传感器监测溶液份量,使其得到期待的溶液浓度,溶液混合容器正下方放置的超声波振动仪用来使粉末充分溶于溶液中,在溶液混合容器上方的三维运动平台中装载的测量模块中的ph计、温度计和电导率传感器用来全方位监测溶液ph值、温度和电导率;液位传感器固定在溶液支架上且靠近溶液混合容器的边缘方便对溶液混合容器进行探测信号和传输;经过超声
波振动仪一段时间的工作,药物粉末试样制备完成。
15.与现有技术相比,本发明的有益效果如下:1、本发明利用容器递送系统、粉末定量加样混合系统、溶液混合系统、控制器的相互配合,从而能够实现对药物试样样品更加精准的制备控制和质量反馈功能,也大大提高了药物试样样品的制备效率,同时也能有效避免带有风险性的样品对实验人员造成的困扰。
16.2、容器递送系统通过输送盘配合递送抓手、递送舵机能够持续、稳定、高效的将样品容器传递到粉末定量加样混合系统的电子秤上,粉末定量加样混合系统通过水平滑台将相对应的送粉头移动至样品容器正上方,通过竖直驱动单元将旋转驱动单元移动至送粉开关槽内,通过旋转驱动单元对送粉开关槽的调节,从而实现对送粉头底端送粉开关的精准调控动作,从而精准实现对药物样品的流量调节,电子秤对样品容器内药物样品的重量进行称量,并将数据传输给控制器,通过控制器的自动化调节,从而实现对药物样品的精准计量,电子秤称量完成后,机械手直线推杆伸展,机械手舵机ⅱ控制机械手抓手对样品容器进行夹持,舵机调节臂端部的容器盖在机械手舵机ⅲ的作用下在舵机调节臂上转动,从而实现对样品容器的封盖动作,而后机械手舵机ⅰ控制机械手抓手旋转,对样品容器内的药物样品进行均匀混合,混合完成后,控制机械手抓手复位,机械手舵机ⅲ带动舵机调节臂转动,容器盖随着舵机调节臂移动,容器盖脱离样品容器,最终实现对药物样品的均匀混合。
17.3、在需要进行溶液制备时,溶液混合系统启动,机械手旋转台转动,带动样品容器移动至溶液混合容器上方,机械手舵机ⅰ控制机械手抓手旋转,将样品容器内的药物样品倾倒入溶液混合容器内,控制溶液输送泵向溶液混合容器输送溶液,通过超声波振动仪对溶液混合容器进行超声波混合动作,使药物样品充分溶于溶液中,从而实现药物粉末溶液以及药物溶液的混合动作。
18.4、本发明共有三种选择模式,药物粉末混合,药物粉末溶液混合与药物溶液混合,选择需要的混合模式,输入所需药物粉末以及溶液的品类和用量,装置会根据选择的模式启动不同的系统,药物混合命令开启后,在药物粉末混合模式下,容器递送系统、粉末定量加样混合系统及控制器工作,在粉末溶液混合模式下,容器递送系统、粉末定量加样混合系统、溶液混合系统及控制器工作,在溶液混合模式下,溶液混合系统及控制器工作;本发明能够实现三种模式下的药物混合制备,从而有效提升了本技术的适用范围,解决了设备仅能进行同类药物混合的问题。
附图说明
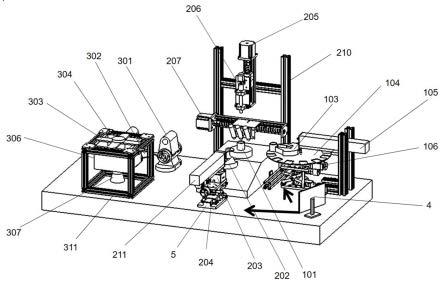
19.图1是实施例1中本发明的结构示意图;图2是实施例1中本发明的结构示意图;图3是实施例1中容器递送系统的结构示意图;图4是实施例1中粉末定量加样混合系统的结构示意图;图5是实施例1中溶液混合系统的结构示意图;图6是实施例1中三维运动平台的结构示意图。
20.图中,1、容器递送系统,2、粉末定量加样混合系统,3、溶液混合系统,4、控制器,5、机械手模块,6、测量模块,101、样品容器,102、递送舵机,103、递送抓手,104、输送盘,105、
递送直线推杆,106、递送旋转台,107、递送支架,108、递送升降台,109、递送锁紧螺丝,201、送粉开关槽,202、机械手抓手,203、机械手旋转台,204、机械手升降台,205、竖直驱动单元,206、旋转驱动单元,207、水平滑台,208、送粉安装板,209、电子秤,210、混合支架,211、机械手直线推杆,212、机械手舵机ⅲ,213、舵机调节臂,214、编码器,215、容器盖,216、机械手舵机ⅱ,217、机械手舵机ⅰ,218、机械手锁紧螺丝,219、调节旋钮,220、送粉头,221、电机转接板,301、溶液输送泵,302、输液管,303、三维运动平台,304、液位传感器,305、ph计,306、溶液混合容器,307、超声波振动仪,308、温度计,309、入液口,310、电导率传感器,311、溶液支架。
具体实施方式
21.以下通过具体实施例对本发明作进一步详细说明,但并不限制本发明的范围。
22.实施例1:一种多成分药物柔性制备与质量控制装置,其结构如图1-图6所示,包括粉末定量加样混合系统2、与粉末定量加样混合系统2电性连接的控制器4,粉末定量加样混合系统2的两侧分别设有与粉末定量加样系统相配合的容器递送系统1、溶液混合系统3,粉末定量加样混合系统2上设有与容器递送系统1、溶液混合系统3相配合的机械手模块5,机械手模块5、容器递送系统1、溶液混合系统3均与控制器4电性连接。
23.容器递送系统1包括递送升降台108,递送升降台108上设有递送旋转台106,递送旋转台106上设有输送盘104,输送盘104的顶面外周均布有间隙配合的容器凹槽。递送升降台108远离粉末定量加样混合系统2的一侧设有递送支架107,递送支架107上设有递送直线推杆105,递送直线推杆105的活动端设有与输送盘104间隙配合的递送抓手103,递送抓手103上设有与递送抓手103相配合的递送舵机102,递送抓手103与容器凹槽相配合。
24.粉末定量加样混合系统2包括混合支架210,混合支架210的上部设有竖直驱动单元205,竖直驱动单元205上设有旋转驱动单元206,旋转驱动单元206与设置在混合支架210下部的水平滑台207相配合,水平滑台207上设有送粉安装板208,送粉安装板208上设有至少一个送粉头220,送粉头220的一侧设有送粉开关,送粉开关上设有与旋转驱动单元206相配合的送粉开关槽201。
25.竖直驱动单元205上设有与旋转驱动单元206相连接的电机转接板221,旋转驱动单元206上设有与控制器4电性连接的编码器214;混合支架210的一侧设有与旋转驱动单元206、递送抓手103相配合的电子秤209,电子秤209设置在水平滑台207下方与水平滑台207、送粉头220间隙配合;递送升降台108上设有与递送升降台108相配合的递送锁紧螺丝109。
26.机械手模块5包括机械手升降台204,机械手升降台204上设有机械手旋转台203,机械手旋转台203上设有机械手直线推杆211,机械手直线推杆211的活动端设有机械手舵机ⅰ217,机械手舵机ⅰ217远离机械手直线推杆211的一侧设有间隙配合的机械手舵机ⅲ212、机械手抓手202,机械手舵机ⅲ212设置在机械手抓手202正上方;机械手抓手202上设有与机械手抓手202相配合的机械手舵机ⅱ216。
27.机械手舵机ⅲ212上设有与机械手舵机ⅲ212相配合的舵机调节臂213,舵机调节臂213上设有与舵机调节臂213相连接的容器盖215;机械手抓手202与旋转驱动单元206、送粉头220相配合;机械手升降台204上设有与机械手升降台204相配合的调节旋钮219、机械
手锁紧螺丝218。
28.溶液混合系统3包括溶液支架311,溶液支架311上设有与机械手抓手202相配合的溶液混合容器306,溶液混合容器306上设有入液口309,入液口309通过输液管302连接有溶液输送泵301,溶液混合容器306的正下方设置有与溶液混合容器306相配合的超声波振动仪307;溶液支架311上设有与溶液混合容器306相配合的三维运动平台303,三维运动平台303底端设有与溶液混合容器306相配合的测量模块6。
29.测量模块6包括设置在三维运动平台303底端与控制器4电性连接的ph计305、温度计308、电导率传感器310;溶液支架311上设有与溶液混合容器306相配合的液位传感器304,液位传感器304与控制器4电性连接。
30.根据上述多成分药物柔性制备与质量控制装置的方法,步骤包括:步骤一:药物制备前的准备;当需要制备样品时,首先调整容器递送系统1中递送升降台108的高度,在到达所需高度之后,转动递送锁紧螺丝109对递送升降台108高度进行固定,而后调整粉末定量加样混合系统2的机械手模块5中机械手升降台204的高度,转动调节旋钮219,在到达所需高度之后,转动机械手锁紧螺丝218对机械手升降台204高度进行固定。
31.步骤二:药物混合模式的选择;递送升降台108、机械手升降台204的高度调整完成后,打开控制器4,根据需要可选择药物粉末混合、药物粉末溶液混合、药物溶液混合三种模式,模式选择完成后,输入所需药物粉末以及溶液的品类和用量,本装置会根据选择的模式启动不同的系统,通过控制器4选择开始命令。
32.在药物粉末混合模式下,容器递送系统1、粉末定量加样混合系统2及控制器4配合工作;在粉末溶液混合模式下,容器递送系统1、粉末定量加样混合系统2、溶液混合系统3及控制器4配合工作;在溶液混合模式下,溶液混合系统3及控制器4配合工作。
33.控制器4根据选择的模式选择合适的步骤对药物粉末试样进行制备;相关系统的电机与传感器参数均会传输到控制器4中,控制器4依据这些参数,实现对整个装置的精准控制。
34.步骤三:容器递送系统1的运行;在容器递送系统1的输送盘104的容器凹槽放置样品容器101,控制器4控制递送旋转台106以合适的速率顺时针转动,待样品容器101随输送盘104转至递送抓手103处递送旋转台106停止,在容器凹槽内设置压力传感器,压力传感器方便对样品容器101的位置进行判定,使样品容器101相对应的容器凹槽移动至递送抓手103伸展处,递送支架107上的递送直线推杆105伸展,带动递送抓手103移动到样品容器101处,递送抓手103到达后其两侧恰好包住样品容器101,递送舵机102控制递送抓手103闭合,使递送抓手103可以夹住样品容器101,控制器4控制递送直线推杆105继续伸展,递送抓手103随之移动,将样品容器101送至电子秤209平台上,递送抓手103在递送舵机102的作用下松开,样品容器101安稳放在电子秤209平台上。
35.步骤四:粉末定量加样混合系统2的运行;待样品容器101到达电子秤209平台之后,粉末定量加样混合系统2在控制器4的作用下启动,水平滑台207和竖直驱动单元205可分别实现水平和竖直方向的运动,根据事先
设定的药物粉末的种类,使不同的送粉头220移动到样品容器101上方;这里仅以三个送粉头220举例,每个送粉头220里面储存着不同类型的药粉,可根据实际情况,调整送粉头220的数量及种类;旋转驱动单元206由竖直驱动单元205控制其在z方向的自由移动。
36.水平滑台207驱动不同的送粉头220移动到样品容器101正上方,而后竖直驱动单元205驱动电机转接板221上的旋转驱动单元206向下移动,旋转驱动单元206向下移动到达送粉开关槽201,旋转驱动单元206通过旋转送粉开关槽201控制送粉头220的送粉开关,当送粉开关槽201完全锁死的时候,送粉头220不出粉,当送粉开关槽201微松,粉末开始从送粉头220下面流出,落到样品容器101中,粉末的流出速度与送粉开关槽201的松紧正相关;样品容器101中粉末的质量通过电子秤209称量,为了更精准的控制粉末质量,在粉末质量将要达到要求质量时,由控制器4依据编码器214的读数拉紧送粉头220的送粉开关槽201,对将达到要求质量时依然流出的粉末进行提前预估;如果需要多个种类粉末,装置会重复上述相关操作。
37.粉末制备完成后,粉末定量加样混合系统2的机械手模块5启动,机械手直线推杆211伸展带动机械手抓手202沿y方向移动,待机械手抓手202到达电子秤209平台之后,机械手抓手202的两侧恰好包住样品容器101,机械手舵机ⅱ216控制机械手抓手202闭合,对样品容器101进行夹持,抓紧样品容器101后,控制器4控制机械手抓手202往回移动到初始位置;机械手抓手202正上方的机械手舵机ⅲ212启动,带动舵机调节臂213转动,容器盖215随舵机调节臂213移动,将容器盖215扣紧在样品容器101上,而后,机械手舵机ⅰ217转动,使样品容器101内的粉末混合均匀,再经过一定时间,机械手舵机ⅲ212启动,拿掉容器盖215;此时,由控制器4根据之前输入的指令决定是否进行溶液制备,如果不需要,那么此时所需的药物粉末样品已经制备完成,如果需要进行溶液制备,需要进行溶液混合系统3的操作。
38.步骤五:溶液混合系统3的运行;控制器4控制机械手旋转台203转动,机械手旋转台203带动机械手抓手202抓着样品容器101来到溶液混合容器306上方,机械手舵机ⅰ217旋转一定角度,带动样品容器101旋转,使粉末慢慢倒入溶液混合容器306中,溶液输送泵301连接输液管302通过入液口309向溶液混合容器306灌输溶液,由液位传感器304监测溶液份量,使其得到期待的溶液浓度,溶液混合容器306正下方放置的超声波振动仪307用来使粉末充分溶于溶液中,在溶液混合容器306上方的三维运动平台303中装载的测量模块6中的ph计305、温度计308和电导率传感器310用来全方位监测溶液ph值、温度和电导率;液位传感器304固定在溶液支架311上且靠近溶液混合容器306的边缘方便对溶液混合容器306进行探测信号和传输;经过超声波振动仪307一段时间的工作,药物粉末试样制备完成。
39.实施例2一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有两个送粉头220。
40.实施例3一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有三个送粉头220。
41.实施例4一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装
板208上设有四个送粉头220。
42.实施例5一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有五个送粉头220。
43.实施例6一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有六个送粉头220。
44.实施例7一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有七个送粉头220。
45.实施例8一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有八个送粉头220。
46.实施例9一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有九个送粉头220。
47.实施例10一种多成分药物柔性制备与质量控制装置,与实施例1的不同之处在于:送粉安装板208上设有十个以上的送粉头220。
48.实施例11一种多成分药物柔性制备与质量控制装置的方法,与实施例1的不同之处在于:步骤包括:步骤一:药物制备前的准备;当需要制备样品时,首先调整容器递送系统1中递送升降台108的高度,在到达所需高度之后,转动递送锁紧螺丝109对递送升降台108高度进行固定,而后调整粉末定量加样混合系统2的机械手模块5中机械手升降台204的高度,转动调节旋钮219,在到达所需高度之后,转动机械手锁紧螺丝218对机械手升降台204高度进行固定。
49.步骤二:药物混合模式的选择;递送升降台108、机械手升降台204的高度调整完成后,打开控制器4,根据需要选择药物粉末溶液混合模式,模式选择完成后,输入所需药物粉末以及溶液的品类和用量,本装置会根据选择的模式启动系统,通过控制器4选择开始命令。
50.在粉末溶液混合模式下,容器递送系统1、粉末定量加样混合系统2、溶液混合系统3及控制器4配合工作。
51.控制器4根据选择的模式选择合适的步骤对药物粉末试样进行制备;相关系统的电机与传感器参数均会传输到控制器4中,控制器4依据这些参数,实现对整个装置的精准控制。
52.步骤三:容器递送系统1的运行;在容器递送系统1的输送盘104的容器凹槽放置样品容器101,控制器4控制递送旋转台106以合适的速率顺时针转动,待样品容器101随输送盘104转至递送抓手103处递送旋
转台106停止,在容器凹槽内设置压力传感器,压力传感器方便对样品容器101的位置进行判定,使样品容器101相对应的容器凹槽移动至递送抓手103伸展处,递送支架107上的递送直线推杆105伸展,带动递送抓手103移动到样品容器101处,递送抓手103到达后其两侧恰好包住样品容器101,递送舵机102控制递送抓手103闭合,使递送抓手103可以夹住样品容器101,控制器4控制递送直线推杆105继续伸展,递送抓手103随之移动,将样品容器101送至电子秤209平台上,递送抓手103在递送舵机102的作用下松开,样品容器101安稳放在电子秤209平台上。
53.步骤四:粉末定量加样混合系统2的运行;待样品容器101到达电子秤209平台之后,粉末定量加样混合系统2在控制器4的作用下启动,水平滑台207和竖直驱动单元205可分别实现水平和竖直方向的运动,根据事先设定的药物粉末的种类,使不同的送粉头220移动到样品容器101上方;这里仅以三个送粉头220举例,每个送粉头220里面储存着不同类型的药粉,可根据实际情况,调整送粉头220的数量及种类;旋转驱动单元206由竖直驱动单元205控制其在z方向的自由移动。
54.水平滑台207驱动不同的送粉头220移动到样品容器101正上方,而后竖直驱动单元205驱动电机转接板221上的旋转驱动单元206向下移动,旋转驱动单元206向下移动到达送粉开关槽201,旋转驱动单元206通过旋转送粉开关槽201控制送粉头220的送粉开关,当送粉开关槽201完全锁死的时候,送粉头220不出粉,当送粉开关槽201微松,粉末开始从送粉头220下面流出,落到样品容器101中,粉末的流出速度与送粉开关槽201的松紧正相关;样品容器101中粉末的质量通过电子秤209称量,为了更精准的控制粉末质量,在粉末质量将要达到要求质量时,由控制器4依据编码器214的读数拉紧送粉头220的送粉开关槽201,对将达到要求质量时依然流出的粉末进行提前预估;如果需要多个种类粉末,装置会重复上述相关操作。
55.粉末制备完成后,粉末定量加样混合系统2的机械手模块5启动,机械手直线推杆211伸展带动机械手抓手202沿y方向移动,待机械手抓手202到达电子秤209平台之后,机械手抓手202的两侧恰好包住样品容器101,机械手舵机ⅱ216控制机械手抓手202闭合,对样品容器101进行夹持,抓紧样品容器101后,控制器4控制机械手抓手202往回移动到初始位置;机械手抓手202正上方的机械手舵机ⅲ212启动,带动舵机调节臂213转动,容器盖215随舵机调节臂213移动,将容器盖215扣紧在样品容器101上,而后,机械手舵机ⅰ217转动,使样品容器101内的粉末混合均匀,再经过一定时间,机械手舵机ⅲ212启动,拿掉容器盖215;此时,由控制器4根据之前输入的指令进行溶液制备,进行溶液混合系统3的操作。
56.步骤五:溶液混合系统3的运行;控制器4控制机械手旋转台203转动,机械手旋转台203带动机械手抓手202抓着样品容器101来到溶液混合容器306上方,机械手舵机ⅰ217旋转一定角度,带动样品容器101旋转,使粉末慢慢倒入溶液混合容器306中,溶液输送泵301连接输液管302通过入液口309向溶液混合容器306灌输溶液,由液位传感器304监测溶液份量,使其得到期待的溶液浓度,溶液混合容器306正下方放置的超声波振动仪307用来使粉末充分溶于溶液中,在溶液混合容器306上方的三维运动平台303中装载的测量模块6中的ph计305、温度计308和电导率传感器310用来全方位监测溶液ph值、温度和电导率;液位传感器304固定在溶液支架311上且靠近溶液混合容器306的边缘方便对溶液混合容器306进行探测信号和传输;经过超声波振动
仪307一段时间的工作,药物粉末试样制备完成。
57.步骤六:药物粉末试样制备的完成;控制器4根据选择的模式选择合适的步骤对药物粉末试样进行制备;相关系统的电机与传感器参数均会传输到控制器4中,控制器4依据这些参数,实现对整个装置的精准控制;至此,药物粉末试样制备完成。
58.实施例12一种多成分药物柔性制备与质量控制装置的方法,与实施例1的不同之处在于:步骤包括:步骤一:药物制备前的准备;当需要制备样品时,首先调整容器递送系统1中递送升降台108的高度,在到达所需高度之后,转动递送锁紧螺丝109对递送升降台108高度进行固定,而后调整粉末定量加样混合系统2的机械手模块5中机械手升降台204的高度,转动调节旋钮219,在到达所需高度之后,转动机械手锁紧螺丝218对机械手升降台204高度进行固定。
59.步骤二:药物混合模式的选择;递送升降台108、机械手升降台204的高度调整完成后,打开控制器4,根据需要选择药物粉末混合模式,模式选择完成后,输入所需药物粉末的品类和用量,本装置会根据选择的模式启动系统,通过控制器4选择开始命令。
60.在药物粉末混合模式下,容器递送系统1、粉末定量加样混合系统2及控制器4配合工作。
61.控制器4根据选择的模式选择合适的步骤对药物粉末试样进行制备;相关系统的电机与传感器参数均会传输到控制器4中,控制器4依据这些参数,实现对整个装置的精准控制。
62.步骤三:容器递送系统1的运行;在容器递送系统1的输送盘104的容器凹槽放置样品容器101,控制器4控制递送旋转台106以合适的速率顺时针转动,待样品容器101随输送盘104转至递送抓手103处递送旋转台106停止,在容器凹槽内设置压力传感器,压力传感器方便对样品容器101的位置进行判定,使样品容器101相对应的容器凹槽移动至递送抓手103伸展处,递送支架107上的递送直线推杆105伸展,带动递送抓手103移动到样品容器101处,递送抓手103到达后其两侧恰好包住样品容器101,递送舵机102控制递送抓手103闭合,使递送抓手103可以夹住样品容器101,控制器4控制递送直线推杆105继续伸展,递送抓手103随之移动,将样品容器101送至电子秤209平台上,递送抓手103在递送舵机102的作用下松开,样品容器101安稳放在电子秤209平台上。
63.步骤四:粉末定量加样混合系统2的运行;待样品容器101到达电子秤209平台之后,粉末定量加样混合系统2在控制器4的作用下启动,水平滑台207和竖直驱动单元205可分别实现水平和竖直方向的运动,根据事先设定的药物粉末的种类,使不同的送粉头220移动到样品容器101上方;这里仅以三个送粉头220举例,每个送粉头220里面储存着不同类型的药粉,可根据实际情况,调整送粉头220的数量及种类;旋转驱动单元206由竖直驱动单元205控制其在z方向的自由移动。
64.水平滑台207驱动不同的送粉头220移动到样品容器101正上方,而后竖直驱动单
元205驱动电机转接板221上的旋转驱动单元206向下移动,旋转驱动单元206向下移动到达送粉开关槽201,旋转驱动单元206通过旋转送粉开关槽201控制送粉头220的送粉开关,当送粉开关槽201完全锁死的时候,送粉头220不出粉,当送粉开关槽201微松,粉末开始从送粉头220下面流出,落到样品容器101中,粉末的流出速度与送粉开关槽201的松紧正相关;样品容器101中粉末的质量通过电子秤209称量,为了更精准的控制粉末质量,在粉末质量将要达到要求质量时,由控制器4依据编码器214的读数拉紧送粉头220的送粉开关槽201,对将达到要求质量时依然流出的粉末进行提前预估;如果需要多个种类粉末,装置会重复上述相关操作。
65.粉末制备完成后,粉末定量加样混合系统2的机械手模块5启动,机械手直线推杆211伸展带动机械手抓手202沿y方向移动,待机械手抓手202到达电子秤209平台之后,机械手抓手202的两侧恰好包住样品容器101,机械手舵机ⅱ216控制机械手抓手202闭合,对样品容器101进行夹持,抓紧样品容器101后,控制器4控制机械手抓手202往回移动到初始位置;机械手抓手202正上方的机械手舵机ⅲ212启动,带动舵机调节臂213转动,容器盖215随舵机调节臂213移动,将容器盖215扣紧在样品容器101上,而后,机械手舵机ⅰ217转动,使样品容器101内的粉末混合均匀,再经过一定时间,机械手舵机ⅲ212启动,拿掉容器盖215,至此,药物粉末试样制备完成。
66.实施例13一种多成分药物柔性制备与质量控制装置的方法,与实施例1的不同之处在于:步骤包括:步骤一:药物制备前的准备;当需要制备样品时,首先调整容器递送系统1中递送升降台108的高度,在到达所需高度之后,转动递送锁紧螺丝109对递送升降台108高度进行固定,而后调整粉末定量加样混合系统2的机械手模块5中机械手升降台204的高度,转动调节旋钮219,在到达所需高度之后,转动机械手锁紧螺丝218对机械手升降台204高度进行固定。
67.步骤二:药物混合模式的选择;递送升降台108、机械手升降台204的高度调整完成后,打开控制器4,根据需要选择药物溶液混合三种模式,模式选择完成后,输入所需溶液的品类和用量,本装置会根据选择的模式启动系统,通过控制器4选择开始命令。
68.在溶液混合模式下,溶液混合系统3及控制器4配合工作。
69.步骤三:溶液混合系统3的运行;控制器4控制机械手旋转台203转动,机械手旋转台203带动机械手抓手202抓着样品容器101来到溶液混合容器306上方,机械手舵机ⅰ217旋转一定角度,带动样品容器101旋转,使溶液慢慢倒入溶液混合容器306中,溶液输送泵301连接输液管302通过入液口309向溶液混合容器306灌输溶液,由液位传感器304监测溶液份量,使其得到期待的溶液浓度,溶液混合容器306正下方放置的超声波振动仪307用来使溶液充分溶于溶液中,在溶液混合容器306上方的三维运动平台303中装载的测量模块6中的ph计305、温度计308和电导率传感器310用来全方位监测溶液ph值、温度和电导率;液位传感器304固定在溶液支架311上且靠近溶液混合容器306的边缘方便对溶液混合容器306进行探测信号和传输;经过超声波振动仪307一段时间的工作,药物粉末试样制备完成。
70.以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1