一种集中供料系统的制作方法
1.本实用新型属于光纤生产设备的技术领域,具体涉及一种集中供料系统。
背景技术:
2.光纤拉丝是将光纤预制棒放入2000度的高温炉子中融化,在表面张力的作用下收缩,在牵引轮的作用下拉制成直径为125微米左右的细丝,刚拉出的光纤需要迅速在表面上涂上一层丙烯酸树脂,保护光纤,防止光纤上面的微裂纹扩大,影响光纤强度,并可以对光纤进行一定的缓冲作用,改善光纤的衰减性能。
3.现在光纤的涂覆基本都采用集中供料系统,集中供料系统使用的是1吨左右的大涂料桶进行供料。但是在供料的后期,由于大涂料桶底面积较大,当涂料剩余大约还有100kg的时候,由于涂料液面已经下降到涂料桶出口的位置,若在继续供料,将导致空气进入涂料供给管道中产生气泡,影响光纤质量和强度。若更换新的涂料桶,剩余较多的涂料需要回收处理,造成浪费。本系统可以将涂料内部的剩余涂料从100kg降低到20kg左右,大大降低的回收处理量。
技术实现要素:
4.本实用新型的目的在于针对现有技术中的上述不足,提供一种集中供料系统,以解决当涂料液面下降到涂料桶出口的位置,将导致空气进入涂料供给管道中产生气泡,影响光纤质量和强度的问题。
5.为达到上述目的,本实用新型采取的技术方案是:
6.一种集中供料系统,其包括涂料桶、升降组件和涂料泵;涂料桶设于升降组件上,升降组件升降作业以带动涂料桶进行倾斜运动;涂料桶内插设有液位传感器,涂料桶的底部开设有涂料桶出口;涂料桶出口通过管道与涂料泵连通;升降组件、液位传感器和涂料泵均与控制器电性连接。
7.进一步地,升降组件包括上承重臂和下承重臂;下承重臂位于上承重臂下方,且下承重臂上靠近所述涂料桶出口的一端与上承重臂上靠近所述涂料桶出口的一端设有旋转支点,旋转支点将上承重臂一端和下承重臂一端活动连接。
8.进一步地,下承重臂上远离所述涂料桶出口的一端上设有气缸,气缸上的活塞杆的自由端与上承重臂相连;活塞杆作业带动上承重臂在竖直方向上绕旋转支点旋转运动。
9.进一步地,气缸的进气端通过管道分别与升电磁阀和降电磁阀连通;升电磁阀与压缩空气连通;降电磁阀与外部空气连通;且升电磁阀和所述降电磁阀受控于控制器。
10.进一步地,下承重臂上靠近气缸的位置处设有水平限位块。
11.进一步地,涂料泵进口端与涂料桶出口端之间的管道上设有泵进口阀;涂料泵出口端与泵出口阀连通。
12.进一步地,涂料桶上设有涂料盖。
13.本实用新型提供的集中供料系统,具有以下有益效果:
14.本实用新型采用升降组件对涂料桶进行升降作业,当涂料桶内的涂料液面快低于涂料桶出口时,控制接通升电磁阀开启气缸作业,气缸带动涂料桶倾斜作业,将涂料向涂料桶出口端倾斜移动,进而将更多的涂料从涂料桶出口端导出,本实用新型即增大了涂料的使用率,也避免了空气进入涂料桶出口中,避免了空气影响后续光纤的质量和强度,具有较强的实用性。
附图说明
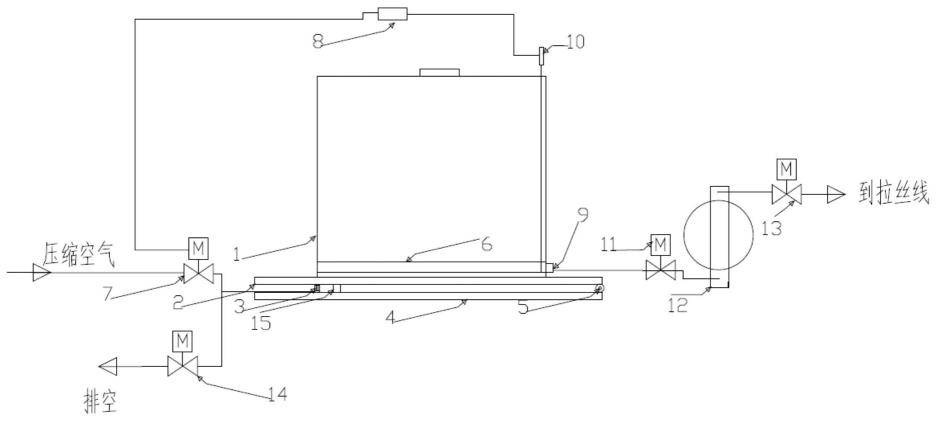
15.图1为本实用新型的结构图示意图;
16.图2为本实用新型升降组件抬起涂料桶时的作业图;
17.其中,1、涂料桶;2、上承重臂;3、气缸;4、下承重臂;5、旋转支点;6、涂料盖;7、升电磁阀;8、控制器;9、涂料桶出口;10、液位传感器;11、泵进口阀;12、涂料泵;13、泵出口阀;14、降电磁阀;15、水平限位块。
具体实施方式
18.下面对本实用新型的具体实施方式进行描述,以便于本技术领域的技术人员理解本实用新型,但应该清楚,本实用新型不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本实用新型的精神和范围内,这些变化是显而易见的,一切利用本实用新型构思的实用新型创造均在保护之列。
19.实施例1,参考图1,本方案的集中供料系统,包括涂料桶1、升降组件和涂料泵12。
20.涂料桶1设于升降组件上,升降组件升降作业以带动涂料桶1进行倾斜运动,并将剩余的涂料沿涂料桶出口9端倾斜,以将更多的涂料导出。
21.涂料桶1上设有涂料盖6,涂料桶1内插设有液位传感器10,液位传感器10用于实时检测当前涂料的液位,当涂料液位低于预设值时,控制器8控制升电磁阀7开启气缸3作业。
22.涂料桶1的底部开设有涂料桶出口9,涂料桶出口9通过管道与涂料泵12连通,涂料泵12将涂料作用至光纤的拉丝线端,用于对光纤进行涂料。
23.涂料泵12进口端与涂料桶出口9端之间的管道上设有泵进口阀11,涂料泵12出口端与泵出口阀13连通,泵进口阀11用于控制涂料的进入,泵进口阀11用于控制涂料从涂料泵12的导出。
24.需要说明的是,光纤制备中,涂料泵12和光纤的喷涂为本领域的常规技术,在此不保护其喷涂的结构特征,故不赘述其喷涂过程。
25.升降组件、液位传感器10和涂料泵12均与控制器8电性连接,本实施例控制器8可以直接选用现有的stm32单片机作为控制器8,以控制升降组件作业,接收液位传感器10的液面信息等。
26.其中,液位传感器10可以直接选用现有的液位传感器10,如星仪cyw101智能无线型液位变送器。
27.实施例2,参考图1和图2,为实现对涂料桶1的倾斜运动,本实施例提供一种升降组件的具体设置,其具体为:
28.升降组件包括上承重臂2和下承重臂4,下承重臂4位于上承重臂2下方,且下承重臂4上靠近涂料桶出口9的一端与上承重臂2上靠近涂料桶出口9的一端设有旋转支点5,旋
转支点5将上承重臂2一端和下承重臂4一端活动连接,以实现上承重臂2绕着旋转支点5进行旋转运动。
29.下承重臂4上远离涂料桶出口9的一端上设有气缸3,气缸3上的活塞杆的自由端与上承重臂2相连,活塞杆上下作业带动上承重臂2在竖直方向上旋转运动,进而带动涂料桶1的一端向上运动。
30.气缸3的进气端通过管道分别与升电磁阀7和降电磁阀14连通;升电磁阀7和降电磁阀14分别与外部空气连通;具体为升电磁阀7与外部的压缩空气连通,用于为气缸3提供动力,降电磁阀14用于将气缸3内的气体排除;且升电磁阀7和降电磁阀14受控于控制器8。
31.下承重臂4上靠近气缸3的位置处设有水平限位块15,水平限位块15用于支撑上承重臂2。
32.本方案一种集中供料系统的工作原理为:
33.将新换的满的桶涂料放置在上承重臂2上面,升电磁阀7关闭,降电磁阀14开启,气缸3中间的活塞在上承重臂2和涂料桶1的重力作用下向下运动,气缸3内下腔体的空气通过降电磁阀14排出到空气中,上承重臂2直到碰到限位块,此时,涂料桶1和上承重臂2水平,启动涂料泵12,打开泵进口阀11和泵出口阀13给拉线线供料。
34.当液位传感器10监测到涂料桶1内的涂料液面用到快接近涂料桶出口9时,为了防止涂料液面进一步下降导致空气进入涂料桶出口9及后面的管道,控制器8控制关闭降电磁阀14,打开升电磁阀7,压缩空气进入气缸3,气缸3活塞杆在压缩空气的压力下向上运动,上承重臂2绕旋转支点5顺时针转动,涂料桶1内的涂料向右方移动,涂料桶出口9处的涂料液面抬高,从而保证空气不会进入到后面管道中,且可增大涂料的利用率。
35.当液位传感器10再次监测到涂料桶1内的涂料液面用到快接近涂料桶出口9时,此时,需要关闭泵进口阀11和泵出口阀13,进行涂料桶1的更换作业。
36.虽然结合附图对实用新型的具体实施方式进行了详细地描述,但不应理解为对本专利的保护范围的限定。在权利要求书所描述的范围内,本领域技术人员不经创造性劳动即可做出的各种修改和变形仍属本专利的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1