基于三维激光雷达和相机的自动碎石方法、设备及介质与流程
本发明涉及碎石机领域,具体涉及一种基于三维激光雷达和相机的自动碎石方法、设备及介质。
背景技术:
1、在传统的矿山开采过程中,碎石是一个重要的环节。传统碎石操作通常需要大量的人力和设备投入,操作效率较低且存在安全隐患。因此,开发一种能够提高矿山碎石操作效率、减少人力投入和提高安全性的自动碎石系统势在必行。
技术实现思路
1、本发明为了克服以上技术的不足,提供了一种提高了矿石开采的安全性和生产效率的基于三维激光雷达和相机的自动碎石方法、设备及介质。
2、本发明克服其技术问题所采用的技术方案是:
3、一种基于三维激光雷达和相机的自动碎石方法,包括:
4、在破碎机旋转平台上安装三维激光雷达和相机;
5、启动设备,将相机拍摄的图像和激光雷达采集的3d点云传输到计算单元;
6、计算单元基于图像和3d点云融合到目标检测模型对矿石进行目标检测和分割,得到矿石的位置中心坐标;
7、控制系统将矿石的位置中心坐标转换成执行机构的运动信息;
8、根据运动信息,破碎锤执行碎石动作。
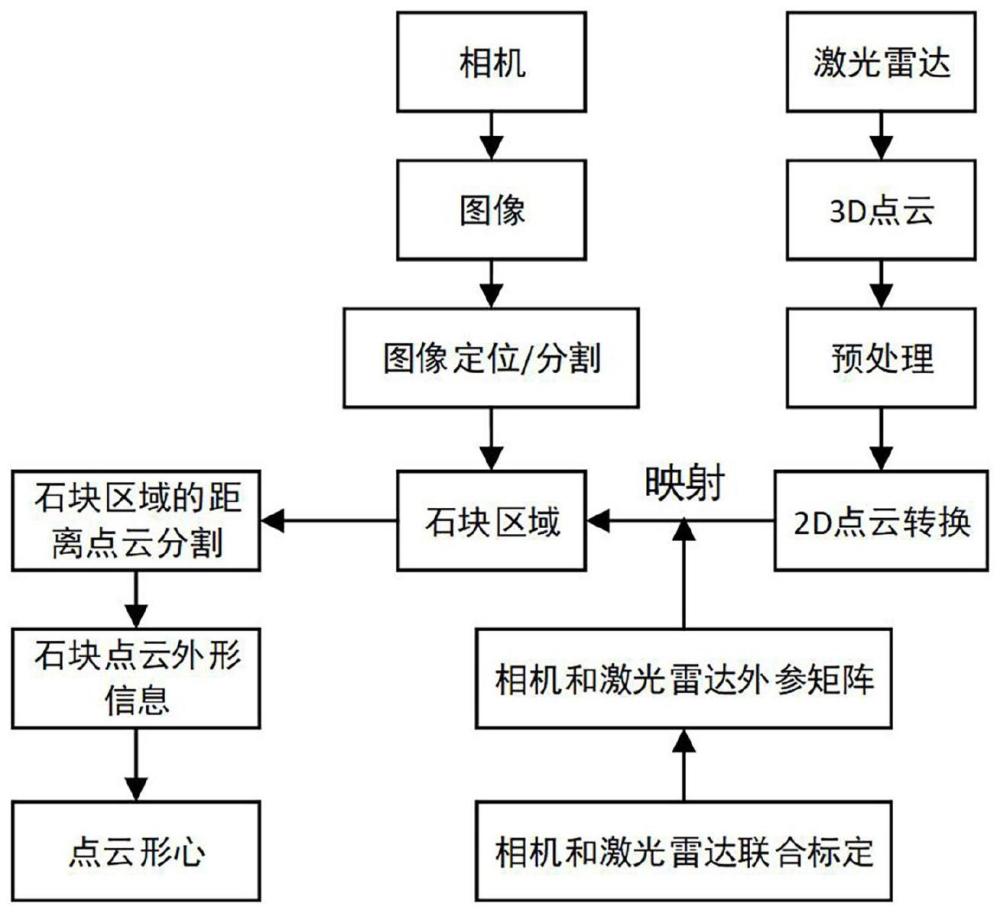
9、进一步的,计算单元基于图像和3d点云融合到目标检测模型对矿石进行目标检测和分割,得到矿石的位置中心坐标的方法为:
10、将相机拍摄的图像中石块区域进行定位,定位后进行分割操作,得到石块区域图像;
11、将三维激光雷达采集的3d点云进行预处理后得到2d点云数据;
12、将相机和三维激光雷达进行联合标定,得到相机和激光雷达的外参矩阵,利用外侧矩阵将2d点云数据映射到石块区域图像上得到石块区域的距离点云分割;根据到石块区域的距离点云分割得到石块点云外形信息,根据石块点云外形信息得到矿石的位置中心坐标。
13、进一步的,通过体素网络降采样或欧几里得点云分割对3d点云进行预处理。
14、进一步的,运动信息包括破碎机大臂的目标角度θ1、破碎机小臂的目标角度θ2、破碎锤的目标角度θ3、破碎机旋转平台(6)的目标角度θ4。
15、进一步的,控制系统将矿石的位置中心坐标转换成执行机构的运动信息的方法为:通过公式计算得到破碎机大臂的目标角度θ1,式中,y为矿石的位置中心y轴坐标值,h1为破碎机大臂支点的y轴坐标,h0为破碎锤的长度,z为矿石的位置中心z轴坐标值,h2为破碎机大臂的支点的高度,l2为破碎机大臂的支点到破碎锤的支点的距离,l0为破碎机大臂的支点到破碎机小臂的支点的距离,l1为破碎机小臂的支点到破碎锤的支点的距离的距离;
16、通过公式计算得到破碎机小臂的目标角度θ2;
17、通过公式计算得到破碎锤的目标角度θ3,式中
18、通过公式计算得到破碎机旋转平台的目标角度θ4,式中x为矿石的位置中心y轴坐标值。
19、一种基于三维激光雷达和相机的自动碎石设备,包括:
20、至少一个处理器,以及
21、与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
22、将相机拍摄的图像和激光雷达采集的3d点云传输到计算单元;
23、计算单元基于图像和3d点云融合到目标检测模型对矿石进行目标检测和分割,得到矿石的位置中心坐标;
24、控制系统将矿石的位置中心坐标转换成执行机构的运动信息;
25、根据运动信息,破碎锤执行碎石动作。
26、一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
27、将相机拍摄的图像和激光雷达采集的3d点云传输到计算单元;
28、计算单元基于图像和3d点云融合到目标检测模型对矿石进行目标检测和分割,得到矿石的位置中心坐标;
29、控制系统将矿石的位置中心坐标转换成执行机构的运动信息;
30、根据运动信息,破碎锤执行碎石动作。
31、本发明的有益效果是:实时获取矿石的三维点云数据和图像数据,通过对三维激光雷达和相机数据的处理和分析,实现对矿石的检测、分割和定位,通过对矿石位置的逆运动学解析、使用模糊pid控制模型实现对矿石的自动碎石操作。提高碎石操作的自动化程度,减少人力投入和降低劳动强度,基于三维激光雷达和相机的实时数据获取,提高碎石设备的定位和检测精度,提高碎石操作的效率和稳定性,减少不必要的资源浪费,提高矿山开采过程的安全性,减少事故和伤害的发生。
技术特征:
1.一种基于三维激光雷达和相机的自动碎石方法,其特征在于,包括:
2.根据权利要求1所述的基于三维激光雷达和相机的自动碎石方法,其特征在于,计算单元基于图像和3d点云融合到目标检测模型对矿石进行目标检测和分割,得到矿石的位置中心坐标的方法为:
3.根据权利要求2所述的基于三维激光雷达和相机的自动碎石方法,其特征在于:通过体素网络降采样或欧几里得点云分割对3d点云进行预处理。
4.根据权利要求1所述的基于三维激光雷达和相机的自动碎石方法,其特征在于:运动信息包括破碎机大臂(3)的目标角度θ1、破碎机小臂(2)的目标角度θ2、破碎锤(1)的目标角度θ3、破碎机旋转平台(6)的目标角度θ4。
5.根据权利要求4所述的基于三维激光雷达和相机的自动碎石方法,其特征在于,控制系统将矿石的位置中心坐标转换成执行机构的运动信息的方法为:通过公式计算得到破碎机大臂(3)的目标角度θ1,式中,y为矿石的位置中心y轴坐标值,h1为破碎机大臂(3)支点的y轴坐标,h0为破碎锤(1)的长度,z为矿石的位置中心z轴坐标值,h2为破碎机大臂(3)的支点的高度,l2为破碎机大臂(3)的支点到破碎锤(1)的支点的距离,l0为破碎机大臂(3)的支点到破碎机小臂(2)的支点的距离,l1为破碎机小臂(2)的支点到破碎锤(1)的支点的距离的距离;
6.一种基于三维激光雷达和相机的自动碎石设备,其特征在于,包括:
7.一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
技术总结
一种基于三维激光雷达和相机的自动碎石方法、设备及介质,涉及碎石机领域,通过将三维激光雷达和相机安装在设备上,实时获取矿石的三维点云数据和图像数据。计算单元通过对三维激光雷达和相机数据的处理和分析,实现对矿石的分割和定位、获取矿石形状中心的位置坐标。控制系统将坐标信息转换成运动信息传输给执行机构,执行机构实现对矿石的自动碎石操作。利用图像和雷达点云的数据融合自动识别矿石位置,通过逆运动学解析把矿石位置转换成执行机构的运动信息、使破碎锤自动碎石。提高了矿石开采的安全性和生产效率。
技术研发人员:牛德奎,宋明明
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!