一种水果莲子智能视觉分选机
1.本发明涉及智能视觉领域,尤其涉及一种水果莲子的智能视觉分选设备。
背景技术:
2.水果莲子是一种可以当水果一样鲜食的籽莲,一般在莲子完全成熟前进行采摘,保证莲子鲜食口感娇嫩。采摘回来的莲子大小不一,同时莲子在采摘收集箱中因互相挤压,容易导致变形、损伤,甚至局部腐烂。当收集箱中有劣质的莲子时,会影响其他莲子的质量,尤其腐烂的莲子会加速好的莲子的腐烂速度。所以,在莲子上市之前,需要对莲子进行大小分选,并剔除劣质果。
3.现有技术中,对莲子的挑选基本都是靠大量的人工来完成,存在人工成本高,效率低下,工作环境受限等问题。国内现有的水果分选设备主要针对大宗水果(一般较大)的挑选,并不能对小型易损的水果莲子进行分选。
技术实现要素:
4.本发明目的在于克服上述背景技术的不足,提供一种莲子智能视觉分选机;该分选机应能在有效分选莲子的同时将劣质果剔除出来,以保证莲子的质量和品质,并且提高分选效率。
5.为实现上述目的,本发明提供的技术方案是:
6.一种莲子智能视觉分选机,包括机架、控制器;其特征在于:所述机架上依序布置着上料机构、由中段水平传送带配合的视觉检测箱、开合式分选机构以及收集框;所述上料机构包括上料斜坡传送带以及位于上料斜坡传送带末端的预分流斜坡;所述视觉检测箱骑跨在在中段水平传送带的上方,对该传送带上若干通道内移动的莲子进行视觉检测;所述开合式分选机构中配设有分别连通不同送果管道与收集框的若干开合板,以实现莲子的分类;所述控制器分别电连接工业相机与驱动开合板的气缸,从而根据检测信息将不同品质的莲子分门别类区分开来。
7.所述的上料机构包括上料框、连通上料框且由电机带动的上料斜坡传送带以及连接在上料斜坡传送带末端且将莲子整合为若干排的预分流斜坡;上料斜坡传送带由传送带支架调整至合适的倾斜坡度,其较低的一端插入在上料框内,使得上料框内的莲子能滑入上料斜坡传送带内并且由上料斜坡传送带携带着往上运输。
8.所述上料斜坡传送带的横向两边分别设置有链条,链条由电机驱动的链轮带动;两边的链条之间是水平布置且沿着链条长度方向依次分布的多个辊子,每个辊子由中心轴以及穿套在中心轴上的轴套组成;中心轴长于轴套,其两端悬伸出轴套之外的部分作为相邻链片的铆接轴。
9.两两辊子之间间隔距离且两两辊子轴线的连线与水平线构成的角度θ与上料斜坡传送带的倾斜角度相同。
10.所述预分流斜坡由墙板分隔为若干排分流道;这些分流道的两端分别与上料斜坡
传送带以及中段水平传送带衔接。
11.所述中段水平传送带的结构与上料斜坡传送带相同;所述中段水平传送带的上方还通过若干隔板分隔成若干个通道,隔板的长度方向平行于中段水平传送带的运动方向;相邻隔板的间距相等。
12.所述视觉检测箱安装在中段水平传送带的中部且横跨过所有通道;安装在视觉检测箱内的工业相机对准着通道,以便对经过通道的莲子进行视觉检测。
13.所述视觉检测箱正下方的传送带下侧还设置一摩擦平板;该摩擦平板与传送带上辊子的下表面紧密接触,以驱使辊子转动。
14.所述开合式分选机构设置有往前倾斜向下布置并且通过若干挡板分隔为与所述通道一一连通的若干通槽,每个通槽的底面开设有至少两个缺口且分别布置有所述开合板以填补这些缺口;每个缺口的下方依序布置有接导果槽、送果管道以及收集框。
15.所述开合板由所述气缸驱动。
16.本发明的有益的效果如下:
17.1、本发明采用视觉技术对莲子的外观进行全面非接触式检测能有效检测莲子表面纹理、变形、损伤、局部腐烂等特征,能够在有效分选莲子的同时将劣质果剔除出来,从而保证莲子的质量和品质;相较于其他非视觉类分选机更加精确,且减少接触损伤。
18.2、本发明在视觉检测箱部位,通过增加摩擦平板与中段水平传送带上的辊子摩擦,带动莲子翻滚以保证视觉检测到每颗莲子的全部表面;而在中段水平传送带的其它部位与上料斜坡传送带,辊子与链子不产生相对滚动,避免莲子与辊子相对滚动造成损伤。
19.3、本发明采用直线气缸作为动力源,直接连接分级卸料口的开合板,分级卸料响应速度快,从而提高了整机的分选效率。
20.4、本发明所设计的螺旋截面接果槽,确保接果时让莲子顺着弧面滚动卸力,避免莲子正向撞击而造成损伤。
附图说明
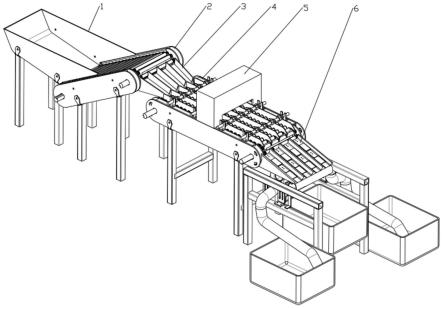
21.图1为本发明的安装结构示意图。
22.图2为本发明的视觉检测机构示意图。
23.图3为本发明中的上料斜坡传送带的安装结构示意图。
24.图4为本发明中的上料斜坡传送带与链条的啮合关系示意图。
25.图5为本发明中上料斜坡传送带携带莲子时的相互关系示意图。
26.图6为本发明的视觉检测机构剖视图。
27.图7为本发明的分选收集机构示意图。
28.图8为本发明的开合式分选机构的剖视图。
29.图中符号说明:1、上料框;2、上料斜坡传送带;3、预分流斜坡;4、中段水平传送带;5、视觉检测箱;6、开合式分选机构;7、螺杆;8、螺母;9、隔板;10、螺杆支撑架;11、工业相机;12、光源;13、摩擦平板;14、大果收集框;15、大果送果管道;16、大果接果导槽;17、分选斜坡;18、开合板;19、小果接果导槽;20、小果送果管道;21、劣质果收集框;22、小果收集框;23、气缸;24、气缸支架。
具体实施方式
30.下面结合附图对本发明作进一步说明。
31.附图所示的种莲子智能视觉分选机,包括机架与控制器(图中省略控制器);所述机架上依序布置着上料机构、由水平传送带配合且配有工业相机的视觉检测箱、开合式分选机构以及收集框;所述上料机构包括上料传送带以及连接在上料传送带末端(图1中可知是右端)且将莲子整合为若干排队列的预分流斜坡;所述视觉检测箱骑跨在中段水平传送带的上方,对该传送带上若干通道内移动的莲子进行检测;所述开合式分选机构中的若干接果导槽分别连通不同的送果管道与收集框,从而根据检测信息将不同质的莲子分门别类区分开来。
32.如图1所示,所述的上料框1为周边设有挡板的容器,固定在上料斜坡传送带2左侧;上料斜坡传送带与驱动上料斜坡传送带的电机(图中省略)均安装在机架上;上料斜坡传送带的两边分别是链条,由电机驱动的链轮带动;两边的链条之间是水平布置且沿着链条长度方向依次布置的多个辊子,每个辊子由中心轴以及穿套在中心轴上的轴套组成;中心轴长于轴套,其两端悬伸出轴套之外的部分正好作为相邻链片的铆接轴(整根链条由多个两两相邻的内链板、外链板以及将相邻的内链板与外链板铰接的销轴组成;为常规的链条结构)。
33.如图5所示:两两辊子之间间隔距离且两两辊子轴线的连线与水平线构成的角度θ正好是上料斜坡传送带的倾斜角度,而莲子轴心与下侧辊子轴线的连线位于过下侧辊子轴线的竖直线的右侧且与该竖直线构成角度β(同时莲子轴心与上侧辊子轴线的连线,跟两两辊子轴线的连线构成的角度为α,且α<θ),表示莲子重心位于两两辊子之间。
34.上料斜坡传送带则倾斜安装在机架上,其较低的一端插入上料框内,以使上料框里的莲子能够落入两两辊子之间;由于α<θ,所以当上料斜坡传送带倾斜往上运动时,除了位于两两辊子之间的莲子被往上运输之外,其余部位堆叠的莲子均纷纷滑落回上料框内,达到了将上料框内堆叠的莲子均匀分散的目的。上料斜坡传送带较高的一端与预分流斜坡3衔接,以将传送带输送的莲子传递给预分流斜坡。所述预分流斜坡则由墙板分隔为若干分流通道(图1中显示被分流为四排);这些分流道的两端分别与上料斜坡传送带以及中段水平传送带衔接。
35.中段水平传送带以及驱动中段水平传送带的电机安装在机架上;中段水平传送带水平布置在机架上并且结构与上料斜坡传送带相同;各辊子的转动轴线垂直于中段水平传送带的运动方向。位于上方的中段水平传送带还通过若干隔板9分隔成若干个通道(图中显示是四个通道),隔板的长度方向平行于水平传送带的运动方向。相邻隔板的间距相等,并且所有隔板均通过螺杆7固定安装在机架上(隔板与中段水平传送带保持间距)。由图2可知:螺杆垂直于隔板布置且通过螺杆支撑架固定在机架上,每个隔板均通过与螺杆配合的两个螺母8夹紧固定,从而实现相邻隔板之间的距离调节。
36.所述视觉检测箱5安装在水平传送带的中部,并且横跨过四个通道;视觉检测箱正下方且传送带的辊子下侧设置一摩擦平板13;该摩擦平板固定在机架上且可与传送带的辊子下侧表面紧密接触,以驱使传送带上的辊子转动。安装在视觉检测箱内的工业相机7对准着通道(优选四个工业相机,一一对准每个通道),从而对经过通道的莲子进行视觉检测。因视觉检测箱是不透光密封的,故在两侧设有光源12(推荐是led灯)对此区域内的莲子进行
补光,以加强视觉检测精度。视觉检测技术以及图像分析技术均为成熟技术,可直接引用。
37.工作时,莲子沿着中段水平传送带4的四个通道前进(图1中是往右前进),并且被该传送带上方的隔板9细分为四排。当莲子被运输到视觉检测箱5下方区域时,因为此处传送带的辊子与传送带下方的摩擦平板13紧密接触,并在摩擦力作用下产生自转,使得传送带上方的每一颗莲子能作360
°
的翻滚,进而被视觉检测箱上的相机检测到完整的外观;从而区分出大果、小果、劣质果。除此之外的其它区域,传送带的辊子与莲子间无相对滚动,避免莲子与辊子相对滚动造成损伤。
38.与水平传送带衔接的是开合式分选机构6。该机构中也设置有往前倾斜向下布置并且通过若干挡板分隔为与所述通道连通的通槽,每个通槽的底面开设有两个缺口且布置有可填补这些缺口用的开合板,每个缺口的下方连通一送果管道。由图8可知。每个缺口下方分别设置有接导果槽(大果接导果槽或小果接导果槽),接导果槽再通过送果管道连通收集框(大果接导果槽16通过大果送果管道15连通大果收集框14;小果接导果槽19通过小果送果管道20连通小果收集框22)。每个开合板的底端固定在气缸23上(优选直线气缸;直线气缸通过气缸支架24固定在机架上;图中省略气缸的压缩空气气源与气动控制部件)。所有通槽最末端对应设置着劣质果收集框21。
39.经过视觉检测箱检测后的莲子,进入开合式分选机构6之后,分别沿着通槽滚落;控制器根据工业相机检测获得的信息发出指令,直线气缸被启动并向下拉动固定在其端部上的开合板18,使得莲子通过缺口落入相应的通道(大果通道、小果通道)。缺口下方安装有螺旋截面的大果接果导槽16和小果接果导槽19,可以确保接果时让莲子顺着弧面滚动卸力,避免莲子正向撞击而造成损伤,把大果莲子送入大果送果管道15,把小果莲子送入小果送果管道20,然后莲子顺着管道分别进入大果收集框14、小果收集框22。莲子从通槽掉落后,气缸往上推动开合板,使其恢复原位,通道关闭。劣质果顺着关闭开合板后的通槽滚落到劣质果收集框。至此分选完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1