一种基于机器视觉的离心机自动控制系统及方法与流程
本发明涉及图像数据处理,具体涉及一种基于机器视觉的离心机自动控制系统及方法。
背景技术:
1、固液分离是一种常见的物质分离方法,它通过不同物质在溶剂中的溶解度差异来实现。离心机是一种应用固液分离的常规设备,被广泛运用于制药、新能源电池、化工、石油、食品、选矿、煤炭、水处理和船舶等多个行业,对于现在工业生产已经成为一种不可缺少的工业机械。
2、通常在固体和母液分离过程中,测量物料的相关特征参数是控制优化获得所需产品质量和生产效率的重要手段之一,现有技术有采用摄像头采集图像的形式,但大多数仍旧停留下人为的目标识别层面上,同上只是把图像当做基础信息,缺乏对图像进行信息的提取与处理。
3、离心机设备在使用过程中经常处于变速、变载等非平稳工况,由于现有的离心机智能化程度较低,传统离心机的控制方法的可持续生产效率较低,在固液分离的环节中,诸如定期清理摄像头、根据摄像头采集图像判断物料状态和母液分离状态等,导致实际成本较高。
4、现有技术中的机器视觉技术,是通过神经网络对图像进行特征提取,从而自动获取感兴趣的图像特征,机器视觉是实现自动图像特征提取的重要步骤,是目标分类和识别的基础。将机器视觉技术应用在离心机中的固液分离方面,是一种提高离心机智能化程度的可行性技术方案。
技术实现思路
1、本发明的目的在于提供一种基于机器视觉的离心机自动控制系统及方法,以解决现有技术中的离心机在固液分离时仍有多个需要人工处理的环节导致成本较高问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
3、一种基于机器视觉的离心机自动控制方法,包括如下步骤:
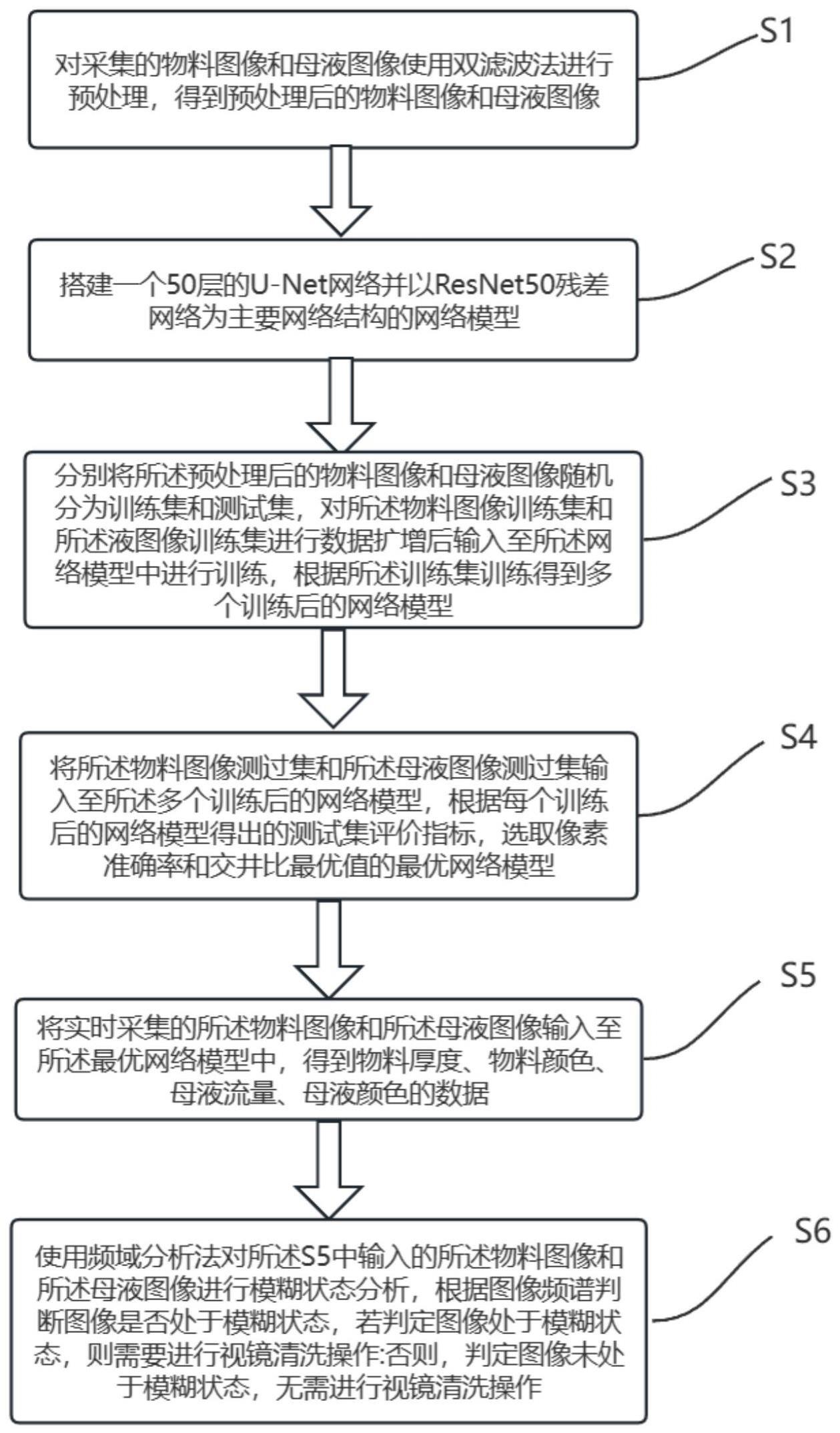
4、s1:对采集的物料图像和母液图像使用双滤波法进行预处理,用以淡化图像中细小特征带来的干扰,得到预处理后的物料图像和母液图像;
5、s2:搭建一个50层的u-net网络并以resnet50残差网络为主要网络结构的网络模型;
6、s3:分别将所述预处理后的物料图像和母液图像随机分为训练集和测试集,对所述物料图像训练集和所述母液图像训练集进行数据扩增后输入至所述网络模型中进行训练,根据每个所述训练集得到多个训练后的网络模型;
7、s4:将所述物料图像测试集和所述母液图像测试集输入至所述多个训练后的网络模型,根据每个训练后的网络模型得出的测试集评价指标,选取最高像素准确率和交并比最优值的最优网络模型;
8、s5:将实时采集的所述物料图像和所述母液图像输入至所述最优网络模型中,得到物料厚度、物料颜色、母液流量、母液颜色的数据;
9、s6:使用频域分析法对所述s5中输入的所述物料图像和所述母液图像进行模糊状态分析,根据图像频谱判断图像是否处于模糊状态,若判定图像处于模糊状态,则需要进行视镜清洗操作;否则,判定图像未处于模糊状态,无需进行视镜清洗操作。
10、作为本发明的一种优选方案,在所述s1中,采集的所述物料图像具体为至少10000张原分辨率为1920×960的物料图像,其中至少2/3的图像为离心机视镜孔进料图像;采集的所述母液图像,其中至少1/3的图像为离心机排水管无母液图像。
11、作为本发明的一种优选方案,在所述s1中,所述双滤波法具体为高斯模糊和中值滤波,使用所述双滤波法对图像进行预处理的具体步骤如下:
12、s11:使用高斯模糊对采集的图像进行去噪处理,先根据高斯分布的公式定义一个高斯核,所述高斯分布的公式如下:
13、
14、其中,g(x,y)是高斯核的坐标,σ是高斯核的标准差;
15、s12:对于图像中的每个像素(x,y),将高斯核与所述图像中的每个像素(x,y)周围领域的像素相乘得到乘积值,并将乘积值相加,得到高斯滤波后的像素值ismooth(x,y),高斯滤波公式如下:
16、
17、其中,i(x+i,y+j)表示图像中邻域内的像素值,x和y分别表示坐标中心值,g(i,j)表示高斯核在坐标(i,j)处的权重,i和j分别表示权重值,k为领域半径;
18、s13:使用中值滤波对高斯滤波后的图像进行进一步处理残余噪声,所述中值滤波公式如下:
19、ismooth(x,y)=mediani(x+i,y+j):-k≤i,j≤k
20、其中,mediani(x+i,y+j)表示对图像中领域内的像素值进行去中值;
21、s14:对滤波后的图像进行缩放,统一缩放至512×512大小。
22、作为本发明的一种优选方案,在所述s2中,所述resnet50残差网络中包含四个残差结构,每个所述残差结构包括不同数量的残差块,每个所述残差块包含三层卷积;
23、同类型的所述残差块按序连接,每个所述残差结构的第一个卷积层的卷积核数量固定为64、128、256、512。
24、作为本发明的一种优选方案,在所述s3中,所述物料图像和母液图像的80%为训练集,剩余20%为测试集,对所述训练集进行数据增强的方式为:对所述训练集的图像进行随机角度翻转、仿射变换和裁剪,得到数量扩增后的训练集数据,并对所有数据进行标准化处理,得到数据扩增后的训练集。
25、作为本发明的一种优选方案,在所述s3中,所述数据增强后的训练集输入至resnet-unet网络模型进行训练的具体方式为:
26、采用随机初始化的方式初始化每一个网络参数,并使用adam梯度下降法优化结合diceloss和focalloss的联合损失函数,所述联合损失函数的计算方式如下:
27、l=λ*l1-logl2
28、其中,l表示u-net网络预测的掩码与训练样本集真实的掩码之间的diceloss和focalloss联合损失函数值,λ表示权重因子,l1表示focalloss损失函数值,l2表示diceloss损失函数值;
29、所述focalloss损失函数值的计算方式为:
30、
31、其中,l1表示focalloss损失函数值,α表示参数调节因子,γ表示参数调节因子,p表示u-net网络输出的二值掩码图像,t表示人工标注的掩码图像;
32、所述diceloss损失函数值由下述公式获得:
33、
34、其中,l2表示diceloss损失函数值。
35、作为本发明的一种优选方案,在所述s4中,所述像素准确率表示pa,其计算方式为:
36、
37、所述交并比表示iou,其计算方式为:
38、
39、其中,tp表示将正类预测为正类的训练样本总数,fn表示将正类预测为负类的训练样本总数,fp表示将负类预测为正类的训练样本总数,tn表示将负类预测为负类的训练样本总数。
40、作为本发明的一种优选方案,在所述s6中,所述频域分析法判断离心机图像是否处于模糊状态的具体步骤如下:
41、s61:通过傅里叶变换将图像从空间域转换到频率域,将图像分解成不同频率的正弦和余弦成分,表示为复数形式,傅里叶变换公式表述如下:
42、f(u,v)=∫∫f(x,y)·e-j2π(ux+uy)dxdy
43、其中,(u,v)表示频率域的坐标,f(u,v)表示在该坐标的值,(x,y)表示空间域的坐标,f(x,y)表示在该坐标的值,j是虚数单位;
44、s62:使用频谱的幅度谱判断图像的模糊程度,通过计算傅里叶变换结果f(u,v)的模,获得频谱的幅度谱s(u,v);
45、s63:计算频谱的幅度谱的中心位置,得到频谱的中心频率,用以进一步判断图像的模糊程度,所述中心频率的计算方式如下:
46、
47、
48、其中,ucenter和vcenter分别表示坐标值的中心频率;
49、s64:通过所述s61-s63得到一个代表图像模糊程度的指标,通过所述指标判断离心机是否需要进行冲水操作。
50、一种基于机器视觉的离心机自动控制系统,使用如上述的基于机器视觉的离心机自动控制方法,包括与离心机连接的两个摄像头、光纤交换机、图形工作站和plc,其特征在于:
51、所述两个摄像头,分别安装在离心机视镜孔和排液管,分别用于对输入至离心机内的物料图像以及输出的母液图像进行采集,并将采集的图像通过所述光纤交换机输入至所述图像工作站和所述plc,
52、所述光纤交换机,用于网络数据的传输,
53、所述图形工作站,包括图像采集模块、图像处理和识别模块、逻辑控制模块,所述图像采集模块用于接收传输的图像信息,所述图像处理和识别模块用于运行网络模型对采集到的物料图像和母液图像进行识别和颜色分析,所述逻辑控制模块用于将处理后得到的分析数据进行连锁控制,
54、所述plc,与所述图像工作站数据连接,并用于数据处理和控制。
55、本发明与现有技术相比较具有如下有益效果:
56、(1)本发明通过采集离心机内物料图像和母液分离图像对现有的网络模型进行训练,得到匹配离心机物料和母液分离情况最优值的网络模型,能够根据采集到的图像得出高准确率的离心机物料厚度、物料颜色、母液流量、母液颜色的情况,提高了离心机的智能化程度,减少了人工,提高了生产效率。
57、(2)本发明还能够判断采集的图像是否模糊,当出现模糊情况时,图形工作站会与plc实现联锁控制,触发视镜清洗装置,防止进料过程中有物料溅射到摄像头或者在进一些有温度的物料导致摄像头视镜上产生雾气,保障了采集图像的质量。
- 还没有人留言评论。精彩留言会获得点赞!