一种用于多维轨道位置调节的控制方法、系统及轨道系统与流程
本发明涉及多级离心的自动控制,具体涉及一种用于多维轨道位置调节的控制方法、系统及轨道系统。
背景技术:
1、微流控技术是一种集样品制备和检测过程于一体的小型化分析平台,其能够在同一设备上利用离心作用促使微流控芯片上的液体进行混合、分离或药物反应,进而完成对应的检测项目。
2、针对不同类型的检测项目而言,其所需的离心力大小、离心位置(如角度)均需要适应性地设定。甚至,对于同一个检测项目而言,可能涉及到离心位置、离心力不同的多级离心。因此,对于芯片离心位置的调节就变得至关重要。
3、现有的大多数离心设备仅支持手动调节位置,然而这种调节方式在实际应用过程中一是操作繁琐效率低下,二是调节精度偏低。
4、例如,cn1747787a公开了一种具有可转动的样品支架的离心设备。当离心管被设置在不同的偏转止挡销处时,离心管的设置角度也随之变化。但是这种调节方式仅限于试管离心。
5、又例如, cn211636959u公开了一种医疗检测用血液差速离心装置。在使用过程中,操作人员通过将需要检测的血液样本滑动套接坐在圆筒内,同时根据样本的高度滑动圆筒在圆柱内的高度,进而对血液样本的位置进行调节。 cn111530641a还公开了一种可调节式离心转盘及其应用,其通过将卡槽固定在不同的定位孔处,则可以调节芯片的离心位置。然而,这种手动调节位置的方式在调节效率和精准度上相对较低。
6、为了能够进行自动化调节,现有技术中也提出了一种自动化设备,其能够利用电机驱动转盘转动,进而通过转盘的转动带动芯片在离心方向上产生变化。
7、例如, cn108380250a公开了一种双轴离心式微流控系统,该系统中设置有可转动的托盘,托盘用于设置芯片,当电机驱动托盘转动时,芯片的离心角度也随之变化。再例如,cn101097184a公开了一种微型芯片检查装置。us2012/0301972a1公开了一种离心装置及其用途和离心方法(centrifugation apparatus, use thereof and centrifugationmethod)。上述离心装置也采用了类似的电机调控方法。
8、但是,这种电机调控方法往往只能实现角度调节,且调节效力相对有限。并且,上述调控方案所采用的调节路线为:利用电机驱动转盘,再通过转盘驱动芯片进行转动。这种电机-转盘-芯片的调节路线往往仅适用于极少量的芯片调节,若要实现多芯片的调节,单台离心设备将需要占用更大的试验空间,且应用成本也非常高昂(例如,用于方向调整的转盘至少会在水平面上占用更大的面积,且所需要配置的动力驱动设备也随之增加,难以实现设备的小型化)。
9、因此,当前亟需一种能够对待离心的多个芯片进行快速、精准位置调节的离心位置自动调节方法。
技术实现思路
1、本发明的目的在于提供一种用于轨道位置调节的控制方法、系统及轨道系统,部分地解决或缓解现有技术中的上述不足,能够利用电机驱动传动条进行线性运动,线性运动带动多个芯片同步转动实现同步位置调节,既能够利用单个电机实现多芯片的同步精准调节,同时还有利于离心设备的小型化。
2、为了解决上述所提到的技术问题,本发明具体采用以下技术方案:
3、本发明的第一方面,提供了一种用于多维轨道位置调节的控制方法,包括步骤:s101获取第一指令信号,且所述第一指令信号包括:芯片在轨道系统上的目标位置信息;其中,所述轨道系统包括:离心盘,设置在所述离心盘的上表面的至少一个传动条,至少一个传动条的首端、尾端相连接形成一条线性轨道,且至少一个传动条在所述离心盘的水平方向上设置有至少一组多向移动空间,所述一组多向移动空间包括:沿第一方向移动的第一转动区,以及沿第二方向移动的第二转动区,其中,第一方向与第二方向在水平方向上相交,且所述传动条在方向转换处设置有转动轮;传动条为柔性材质,可以固定在水平方向和垂直方向的特定角度,从而实现转动轮的多维调整。s102获取当前轨道系统中芯片所对应的当前位置信息,所述当前位置信息包括:当前离心半径或当前离心角度;s103根据第一指令信号和当前位置信息计算第二指令信号,所述第二指令信号包括:传动条的移动位移;s104根据所述第二指令信号驱动电机,其中,所述电机用于驱动转动轮进行移动。
4、本发明第二方面在于提供了一种用于多维轨道位置调节的控制系统,包括:第一指令输入模块,被配置为用于获取第一指令信号,且所述第一指令信号包括:目标位置信息;芯片在轨道系统上的目标位置信息;其中,所述轨道系统包括:离心盘,设置在所述离心盘的上表面的至少一个传动条,至少一个传动条的首端、尾端相连接形成一条线性轨道,且至少一个传动条在所述离心盘的水平方向上设置有至少一组多向移动空间,所述一组多向移动空间包括:沿第一方向移动的第一转动区,以及沿第二方向移动的第二转动区,其中,第一方向与第二方向在水平方向上相交,且所述传动条在方向转换处设置有转动轮;当前位置获取模块,被配置为用于获取当前轨道系统中芯片所对应的当前位置信息,所述当前位置信息包括:当前离心半径或当前离心角度;第二指令计算模块,被配置为用于根据第一指令信号和当前位置信息计算第二指令信号,所述第二指令信号包括:传动条的移动位移;驱动控制模块,被配置为用于根据所述第二指令信号驱动电机,其中,所述电机用于驱动转动轮进行移动。
5、本实施例中,能够利用离心位置的自动调节,快速实现不同检测样本的离心混合需求。
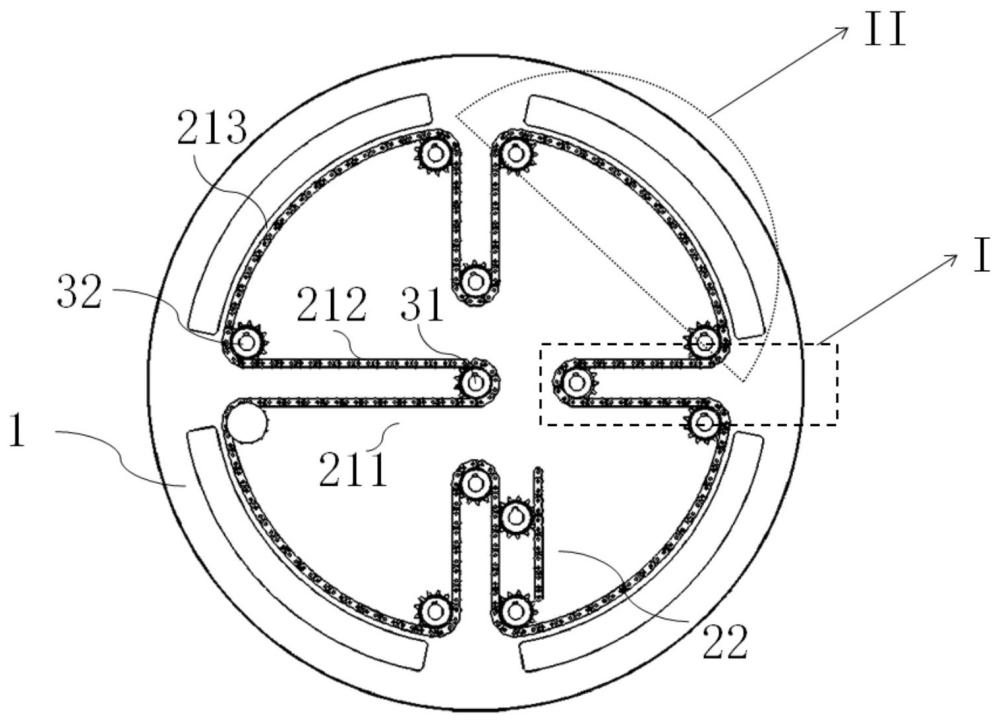
6、本发明另一方面还提供了一种轨道系统,包括:离心盘;设置在所述离心盘的上表面的至少一个传动条,至少一个传动条的首端、尾端相连接形成线性轨道;多个转动轮,传动条能够在至少一个转动轮的驱动作用下进行正向或反向转动;其中,至少一个传动条在所述离心盘上设置有至少一组多向移动空间,所述一组多向移动空间包括:沿第一方向移动的第一转动区,以及沿第二方向移动的第二转动区,其中,第一方向与第二方向相交;第一转动区包括:沿第一方向设置且相互连接的第一传动段和第二传动段,第一传动段和第二传动段连接处设置有第一转动轮,且第一传动段、第二传动段通过第一转动轮实现传动方向的转变;第二转动区包括:沿第二方向设置的第三传动段,其中,所述第三传动段与第二传动段相连接,且对应连接处设置有第二转动轮,从而使得所述传动条的传动方向从第一方向转换为第二方向;至少一组多向移动空间在离心盘上相连接,进而通过多段异向设置的传动段首尾相连形成多向式的轨道。
7、在一些实施例中,所述传动条包括:相连接的多段传动条单元,所述第一传动段沿第一子方向设置,且第一转动区还包括:沿第一子方向设置的第二传动条,所述离心盘上对应于第二传动条和第一传动段之间的间隔区域设置有第一移动位,第一移动位上设置有能够沿第一移动位上往复移动的第三转动轮;其中,当至少一个传动条在至少一个转动轮的驱动下向第三转动轮提供驱动作用力时,则所述第三转动轮在所述第一传动段、所述第二传动条的双向作用下,沿第一移动位进行往复移动。
8、在一些实施例中,所述第三转动轮上设置有第三芯片位,所述第二传动条上还对应地设置有限位件,所述限位件的侧边能够与所述第三芯片位的侧边进行抵接;其中,当所述第三转动轮在至少一个传动条作用下,沿所述第一移动位往复移动时,所述第三芯片位的离心角度保持不变。
9、在一些实施例中,所述轨道系统还包括:调节模块,且所述调节模块包括:信号获取单元,被配置为用于获取第三指令信号,所述第三指令信号包括:目标位置,或者芯片移动至目标位置所需的移动距离;第一驱动单元,被配置为用于响应于所述第三指令信号驱动所述第一传动条,此时,所述第一传动条作为驱动链条,所述第二传动条保持相对静止作为固定链条;验证单元,被配置为用于当所述第一传动条结束驱动之后,获取至少一个芯片的实际位置,并判断所述实际位置与相对应的目标位置是否相符,若是,则向轨道系统的离心控制模块发送启动信号;若否,则根据所述实际位置与目标位置的间距对应地生成第四指令信号,所述第四指令信号包括:将所述芯片移动至目标位置所需的修正距离;第二驱动单元,被配置为用于响应于所述第四指令信号驱动对应的第二传动条,此时所述第一传动条被切换为固定链条,而所述第二传动条被切换为驱动链条。
10、在一些实施例中,所述第二传动段沿第二子方向设置,且第一转动区还包括:沿第二子方向设置的第三传动条,所述离心盘上对应于第三传动条和第二传动段之间的间隔区域设置有第二移动位;所述第二移动位上设置有第四转动轮;其中,当所述第一传动条在至少一个第一转动轮的驱动下向第三、第四转动轮提供驱动作用力时,第三、第四转动轮能够在对应的传动段作用下,沿相反方向进行移动。
11、在一些实施例中,至少一个第一转动轮上设置有第一芯片位。
12、在一些实施例中,所述第一传动条包括:相连接的多段传动条单元,所述第一传动条上还设置有至少一个第二芯片位,所述第二芯片位的两端分别固定在两个传动条单元的连接板上,两个传动条单元以可相对转动的方式连接;其中,当所述第一传动条在至少一个转动轮的驱动下进行移动时,所述第二芯片位能够在转动区内进行往复移动,或者所述第二芯片位能够在各个转动区内进行移动。多个传动条组合可以实现转动轮原位,不同方向和不同角度的移动的组合,从而在一个驱动轮驱动下同时实现不同角度和离心半径调整的灵活性和多样性。
13、本发明还提供了一种轨道系统,包括:离心盘;所述设置在所述离心盘的上表面的至少一个传动条,且所述传动条为拉线;离心盘上间隔地设置有第一主动轴和第二主动轴,且所述拉线的第一端、第二端分别与第一、第二主动轴相连接;其中,第一、第二主动轴能够卷入、卷出拉线,所述拉线上设置有至少一个第四芯片位,所述第四芯片位用于承载芯片;所述离心盘上还设置有导向轴,所述导向轴与主动轴之间还设置有至少一个涨紧轴,其中,所述拉线穿过所述涨紧轴,从而在所述涨紧轴的作用下调节拉线的松紧状态,且所述拉线绕过所述导向轴,以通过所述导向轴实现空间上的方位转变;其中,当第一主动轴转动时,第二主动轴处于被动放线状态;对应地,第二主动轴转动时,第一主动轴则处于被动放线状态。
14、由于仪器的限制,基于离心技术的微流控设计通常都按照液体从中心向外侧流动的方式排布。需要运用亲水力或者气动力等外部推动力才能够实现液体从外侧向中心的流动。这些方式都会增加芯片或控制系统的成本。与改进芯片的内部流道设计相反,本技术可以直接利用轨道系统调整芯片的方向,即可以用简单的方式实现液体在芯片中各个方向的流动,包括水平和垂直方向的流动,极大简化了芯片的流道设计,芯片功能单元的部件不再受位置限制。
15、此外,微型离心的电机有转速限制,由此也限制了高离心力检测的应用。本发明提供了调整离心半径的方法,可以在微型离心转盘上同时实现高离心力和低离心力的操作,摆脱了固定半径离心芯片只能通过调整转速调整离心力的限制。
16、有益技术效果:具体地,本技术基于柔性链条的线性调节提出了一种自动化控制方法,以对批量化芯片进行同步的离心位置或角度的调节。
17、值得说明的是,与现有自动调节路线不同,本技术提出了一种新型的线性调节思路,即利用单一电机驱动传动条进行线性运动,再利用线性运动精准地推动各个不同位置的芯片实现角度或位置的同步调节。这种新型的线性调节路线,既能够利用线性路径的设计实现芯片的同步调节(与现有的各个电机独立调节转盘的模式不同,线性同步调节能够保证芯片离心条件保持一致,试验检测结果可靠性强),并且线性路径的空间设计与单电机使用,能够从体型、成本上进行缩减控制,进而有效降低自动化离心技术的应用成本。
- 还没有人留言评论。精彩留言会获得点赞!