航空发动机最大推力状态鲁棒容错控制器的制作方法
[0001]
本发明涉及航空发动机控制技术领域,尤其涉及一种航空发动机最大推力状态鲁棒容错控制器。
背景技术:
[0002]
航空发动机是一个复杂的非线性动力学系统,其控制系统容易受到工作条件,发动机性能下降,环境条件变化的影响,并且很难事先知道外部干扰和测量噪声的影响。由于飞机发动机的工作过程非常复杂,难以建立准确的数学模型,所以数学模型与实际系统之间总是存在差异。因此,有必要设计一种鲁棒控制器,用于在外部干扰信号,噪声干扰,未建模的动态特性和参数变化的情况下稳定航空发动机控制系统,并具有良好的性能。
[0003]
战斗机由于需要实现高机动性,发动机的最大推力状态的性能及安全性至关重要。传统的鲁棒控制器虽然可以对发动机在最大推力状态实现稳定控制。然而,现代战机对航空发动机性能的要求不断提高,其结构也越来越复杂,并且由于发动机工作环境的恶劣多变,发动机故障约占飞机总故障的1/3。其中,气路部件故障占发动机总体故障的90%以上,其维护费用占发动机总体维护费用的60%。为了保证发动机安全工作并使故障发动机提供足够的性能来保证飞机安全飞行或具有高的机动性,必须对故障的发动机性能进行恢复,并且对发动机进行容错控制,保证控制系统正常稳定工作且具有良好的性能。因此,研究发动机气路部件故障容错控制方法具有重要意义。
[0004]
传统的气路部件故障容错控制方法在航空发动机出现气路部件故障时通过修正控制规律,使得发动机的推力与油门杆始终匹配,有效的保证了发动机的推力。然而,这些设计方法并没有解决当前控制器和发动机模型不匹配从而导致控制系统性能下降甚至不稳定的问题。当发动机发生气路部件故障时,发动机在同一工作点的线性化模型也会发生较大变化。因此,根据正常状态的发动机模型设计的控制器一般无法保证气路部件故障时发动机的性能,甚至无法保证控制系统的闭环稳定。
技术实现要素:
[0005]
为解决现有技术存在的问题,本发明提出一种航空发动机最大推力状态鲁棒容错控制器,具有较强的鲁棒性,并且在最大推力状态能够在发动机机气路部件故障的情况下依旧对真实发动机进行良好控制,保证发动机安全工作,充分发挥发动机最大推力状态的性能,提高飞机的安全性和性能,提高战斗机的机动性。
[0006]
本发明的技术方案为:
[0007]
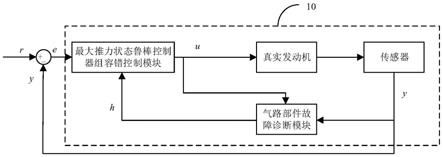
所述一种航空发动机最大推力状态鲁棒容错控制器,其特征在于:包括最大推力状态鲁棒控制器组容错控制模块和气路部件故障诊断模块;
[0008]
其中最大推力状态鲁棒控制器组容错控制模块、气路部件故障诊断模块与航空发动机本体以及航空发动机上的若干传感器组成气路部件故障调度控制回路;
[0009]
所述最大推力状态鲁棒控制器组容错控制模块产生控制输入向量u并输出给航空
发动机本体,传感器得到航空发动机测量参数y;控制输入向量u以及测量参数y共同输入到气路部件故障诊断模块,气路部件故障诊断模块诊断发动机的气路部件故障情况得到航空发动机的健康参数h,并输出到最大推力状态鲁棒控制器组容错控制模块;
[0010]
所述最大推力状态鲁棒控制器组容错控制模块内设计有若干鲁棒控制器,所述鲁棒控制器是利用若干线性不确定性发动机模型而分别设计得到的,所述线性不确定性发动机模型是对航空发动机最大推力状态下的、不同气路部件故障下的航空发动机非线性模型进行线性化后再加入摄动块得到的;
[0011]
所述最大推力状态鲁棒控制器组容错控制模块根据输入的健康参数h,利用内部设计的若干鲁棒控制器计算得到适应的鲁棒控制器,该鲁棒控制器根据参考输入r和测量参数y的差值e产生控制输入向量u。
[0012]
进一步的,所述最大推力状态鲁棒控制器组容错控制模块内设计若干鲁棒控制器的过程为:在航空发动机最大推力状态对包含健康参数的发动机非线性模型进行线性化得到含有健康参数的线性化模型,通过调整健康参数的值,得到分别在发动机无气路部件故障和特定气路部件故障处的11个线性化模型再加入摄动块得到11个线性不确定性发动机模型,并对这11个线性不确定性发动机模型分别设计相应的鲁棒控制器从而组成最大推力状态鲁棒控制器组。
[0013]
进一步的,所述气路部件故障诊断模块中包括非线性机载发动机模型和线性化卡尔曼滤波器;
[0014]
所述非线性机载发动机模型为带健康参数的发动机非线性模型:
[0015][0016]
y=g(x,u,h)
[0017]
其中为控制输入向量,为状态向量,为输出向量,为健康参数向量,f(
·
)为表示系统动态的n维可微非线性向量函数,g(
·
)为产生系统输出的m维可微非线性向量函数;非线性机载发动机模型输入为控制输入向量u以及上一周期的健康参数h,其输出的健康稳态参考值(x
aug,nobem
,y
nobem
)作为线性化卡尔曼滤波器当前周期的估计初始值;
[0018]
所述线性化卡尔曼滤波器的输入为测量参数y以及非线性机载发动机模型输出的健康稳态参考值(x
aug,nobem
,y
nobem
),根据公式
[0019][0020]
计算得到当前周期的发动机的健康参数h;其中k为卡尔曼滤波的增益,满足p为ricati方程的解;系数a
aug
和c
aug
根据公式
[0021]
[0022]
确定,而a、c、l、m是将健康参数h看作发动机的控制输入,并对非线性机载发动机模型在健康稳态参考点处进行线性化得到的反映发动机性能退化的增广线性状态变量模型
[0023][0024]
的系数:
[0025][0026][0027]
w为系统噪声,v为测量噪声,相应的协方差矩阵为对角阵q和r。
[0028]
进一步的,所述最大推力状态鲁棒控制器组容错控制模块根据输入的健康参数h插值得到的适应的鲁棒控制器。
[0029]
进一步的,所述最大推力状态鲁棒控制器组容错控制模块根据航空发动机最大推力状态对应发动机无部件故障的控制器k0,各种典型部件故障δh
base_j
的控制器δh
base_j
表示向量δh的第j个元素的值为δh
base
,其他元素的值为0,即δh
base_j
表示10种不同的部件故障,例如δh
base_1
表示风扇发生了故障且风扇的效率变化量为δh
base
。根据公式
[0030][0031]
计算得到航空发动机最大推力状态处发动机的当前部件故障程度(健康参数为h)下的鲁棒控制器k(式中δh
j
为向量δh的第j个元素;仅考虑||δh||≤||δh
max
||的发动机气路部件故障情况,当||δh||>||δh
max
||发动机已失效)。
[0032]
进一步的,所述测量参数包括进气道出口、风扇出口、压气机出口、高压涡轮后、低压涡轮后的温度和压力,风扇转速和压气机转速。
[0033]
有益效果
[0034]
与现有技术相比较,本发明的航空发动机最大推力状态鲁棒容错控制器利用传统增益调度控制器中固有的模块,通过新增气路部件故障诊断模块,并对最大推力状态鲁棒控制器组容错控制模块进行了改进,新增了发动机不同气路部件故障下的多组鲁棒控制器。气路部件故障诊断模块通过健康参数的可靠估计实现了气路部件故障的准确判断,实现发动机在最大推力状态气路部件故障时的鲁棒容错控制,具有较强的鲁棒性,最大限度的提高发动机在最大推力状态的性能,使发动机气路部件故障时在最大推力状态不仅稳定工作,并且具有最优的性能,提高战斗机的机动性能。
[0035]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0036]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0037]
图1是本发明航空发动机最大推力状态鲁棒容错控制器的结构简图;
[0038]
图2是本实施例气路部件故障调度控制回路中气路部件故障诊断模块的结构示意图;
[0039]
图3是本实施例气路部件故障诊断模块中卡尔曼滤波器的结构示意图。
具体实施方式
[0040]
战斗机由于需要实现高机动性,发动机的最大推力状态的性能至关重要。传统的鲁棒控制器虽然可以对发动机在最大推力状态实现稳定控制,然而,航空发动机在运行过程中由于自然磨损、腐蚀、积垢以及热蠕变等因素都会引起气路部件性能发生蜕化,并且当性能蜕化到一定程度会引发故障;另外,由于外物吸入引起的损伤、机械疲劳断裂等原因,也会引起气路部件故障的发生。前者故障发生的过程较为缓慢,而后者故障发生的过程是迅速的。当发动机气路部件发生故障却并未失效时,此时发动机的部分性能将会严重偏离额定状态。以涡轮部件为例,当其发生故障后,其工作效率将会下降,即将具有高温、高压的燃气转换为机械能的能力将会有所降低,但仍能为风扇或压气机部件提供相应的动力,使其工作在新的平衡状态下。此时发动机也已较大偏离原始状态。气路部件故障会导致发动机设计时所建立的非线性模型和气路部件故障时的真实发动机严重不匹配,进而导致根据该非线性模型设计的增益调度控制器无法对气路部件故障后的发动机进行良好的控制,严重降低了发动机的性能,甚至不能保证控制系统的稳定性,无法保证发动机安全工作。针对这一问题,下面给出本发明的分析研究过程。
[0041]
1、发动机气路部件故障诊断
[0042]
气路部件故障会导致部件对应的特性参数发生变化。发动机气路部件故障最终表征在不同转子部件的工作效率和流通量的改变上,即可以从风风扇、压气机、主燃烧、高压涡轮和低压涡轮部件的效率系数或者流量系数的变化来揭示发动机故障位置以及故障程度,风扇、压气机、主燃烧室、高压涡轮和低压涡轮部件的效率系数或流量系数被称为健康参数。
[0043]
基于部件法,建立带健康参数的发动机非线性模型
[0044][0045]
y=g(x,u,h)
[0046]
其中为控制输入向量,为状态向量,为输出向量,为健康参数向量,f(
·
)为表示系统动态的n维可微非线性向量函数,g(
·
)为产生系统输出的m维可微非线性向量函数。
[0047]
将健康参数h看作发动机的控制输入,采用小扰动法或拟合法对发动机非线性模型在健康稳态参考点处进行线性化。
[0048]
[0049]
其中
[0050]
a
′
=a,b
′
=(b l),c
′
=c,
[0051]
d
′
=(d m),δu
′
=(δu δh)
t
[0052]
w为系统噪声,v为测量噪声,h为健康参数,δh=h-h0;上述w与v皆为不相关的高斯白噪声,其均值均为0,协方差矩阵为对角阵q和r,即满足条件如下:
[0053]
e(w)=0 e[ww
t
]=q
[0054]
e(v)=0 e[vv
t
]=r
[0055]
δ表示该参数的变化量,h0表示发动机初始状态健康参数。
[0056]
进一步得到了反映发动机性能退化的增广线性状态变量模型
[0057][0058]
其中系数矩阵可由下式得到:
[0059][0060][0061]
这些系数在发动机不同的工作状态具有不同的值。
[0062]
实际上,健康参数很难测量,甚至不可能测量,而发动机各部分的压力、温度、转速等参数比较容易通过测量得到,通常称为“测量参数”,主要包括进气道出口、风扇出口、压气机出口、高压涡轮后、低压涡轮后的温度和压力,风扇转速和压气机转速。当发动机工作环境不发生变化时,健康参数的变化会引起被测参数的相应变化,二者之间存在气动热力学关系。因此,可以设计最优估计滤波器,通过测量参数来实现健康参数的最优估计。
[0063]
对于渐变型部件故障,对应故障部件健康参数变化缓慢,因此在进行单次故障诊断的时间周期内,可以认为满足对于突变型部件故障,更加关心的是发动机在故障发生后再次稳定工作时部件故障的严重程度,发动机再次稳定工作后,故障部件的健康参数变化依旧满足将健康参数进一步转化为状态变量,可以得到
[0064][0065]
其中
[0066][0067][0068]
建立的气路部件故障诊断模块主要由两部分组成,一部分是基于健康参数的非线性机载发动机模型,另一部分是分段线性卡尔曼滤波器。基本工作原理是将非线性机载发
动机模型的输出作为分段线性卡尔曼滤波器的稳态参考值,并扩展健康参数,通过分段线性卡尔曼滤波器进行在线实时估计,最后反馈给非线性机载发动机模型进行在线实时更新,实现对实际发动机的实时跟踪。
[0069]
卡尔曼估计方程为:
[0070][0071]
k为卡尔曼滤波的增益,满足p为ricati方程的解;利用非线性机载模型输出的健康稳态参考值(x
aug,nobem
,y
nobem
)作为式
[0072][0073]
的初值,可得计算公式:
[0074][0075]
根据该计算公式可以得到发动机的健康参数h,实现发动机的气路部件故障诊断。
[0076]
2.具有健康参数的不确定模型的鲁棒控制器设计
[0077]
任何实际系统都不可避免地存在不确定性,它可以分为两类:扰动信号和模型不确定性。扰动信号包括干扰、噪声等。模型的不确定性代表了数学模型与实际对象之间的差异。
[0078]
模型不确定性可能有几个原因:线性模型中总有一些参数是有误差的;线性模型中的参数可能由于非线性或工作条件的变化而变化;建模时人为的简化;由于磨损等因素发动机性能的退化。
[0079]
不确定性可能会对控制系统的稳定性和性能产生不利影响。
[0080]
实际的发动机和标称模型(标称模型是一个常规的不带健康参数的发动机非线性模型)之间的误差可以表示为一个摄动块δ。在标称模型加入摄动块建立发动机不确定模型
[0081][0082][0083]
它也可以表示为
[0084]
g(s)=[i+δ(s)]g
nom
(s)
[0085]
最后根据不确定模型利用传统的鲁棒控制器设计方法设计鲁棒控制器。
[0086]
3、控制器的插值
[0087]
这部分说明了图1中的最大推力状态鲁棒控制器组容错控制模块通过健康参数调
度线性插值获得相应的鲁棒控制器的调度计算原理。
[0088]
在发动机最大推力状态,分别在发动机正常状态和各种典型部件故障δh
base_j
状态下设计一系列线性鲁棒控制器,对发动机进行控制。这将产生图1中的最大推力状态鲁棒控制器组容错控制模块中的控制器
[0089]
k0,
[0090]
然后根据健康参数h对控制器进行插值,继而使用得到的插值控制器来控制系统。
[0091]
根据发动机最大推力状态对应发动机无部件故障的控制器k0,各种典型部件故障δh
base_j
的控制器δh
base_j
表示向量δh的第j个元素的值为δh
base
,其他元素的值为0,即δh
base_j
表示10种不同的部件故障,例如δh
base_1
表示风扇发生了故障且风扇的效率变化量为δh
base
。通过线性插值可以得到发动机最大推力状态处气路部件故障h处的控制器
[0092][0093]
并对发动机进行有效控制。
[0094]
基于上述过程,下面给出本实施例中提出的一种航空发动机最大推力状态鲁棒容错控制器,如图1所示,主要包括最大推力状态鲁棒控制器组容错控制模块和气路部件故障诊断模块。
[0095]
其中最大推力状态鲁棒控制器组容错控制模块、气路部件故障诊断模块与航空发动机本体以及航空发动机上的若干传感器组成气路部件故障调度控制回路10。
[0096]
所述最大推力状态鲁棒控制器组容错控制模块产生控制输入向量u并输出给航空发动机本体,传感器得到航空发动机测量参数y;控制输入向量u以及测量参数y共同输入到气路部件故障诊断模块,气路部件故障诊断模块解算得到航空发动机的健康参数h,并输出到最大推力状态鲁棒控制器组容错控制模块。
[0097]
所述最大推力状态鲁棒控制器组容错控制模块内设计有若干鲁棒控制器,所述鲁棒控制器是利用若干线性不确定性发动机模型而分别设计得到的,所述线性不确定性发动机模型是对航空发动机最大推力状态下的、不同气路部件故障下的航空发动机非线性模型进行线性化后再加入摄动块得到的。
[0098]
优选的一种具体实现方式,可以通过以下过程得到设计若干鲁棒控制器:在航空发动机最大推力状态对包含健康参数的发动机非线性模型进行线性化得到含有健康参数的线性化模型,通过调整健康参数的值,得到分别在发动机无气路部件故障和特定气路部件故障处的11个线性化模型再加入摄动块得到11个线性不确定性发动机模型,并对这11个线性不确定性发动机模型分别设计相应的鲁棒控制器从而组成最大推力状态鲁棒控制器组。
[0099]
所述最大推力状态鲁棒控制器组容错控制模块根据输入的健康参数h,利用内部设计的若干鲁棒控制器计算得到适应的鲁棒控制器,该鲁棒控制器根据参考输入r和测量参数y的差值e产生控制输入向量u。
[0100]
优选的一种具体实现方式,可以根据输入的健康参数h插值得到的适应的鲁棒控
制器:
[0101]
根据发动机最大推力状态对应发动机无部件故障的控制器k0,各种典型部件故障δh
base_j
的控制器δh
base_j
表示向量δh的第j个元素的值为δh
base
,其他元素的值为0,即δh
base_j
表示10种不同的部件故障,例如δh
base_1
表示风扇发生了故障且风扇的效率变化量为δh
base
。通过线性插值可以得到发动机最大推力状态处气路部件故障h处的控制器
[0102][0103]
并对发动机进行有效控制。
[0104]
所述气路部件故障诊断模块中包括非线性机载发动机模型和线性化卡尔曼滤波器。
[0105]
所述非线性机载发动机模型为带健康参数的发动机非线性模型:
[0106][0107]
y=g(x,u,h)
[0108]
其中为控制输入向量,为状态向量,为输出向量,为健康参数向量,f(
·
)为表示系统动态的n维可微非线性向量函数,g(
·
)为产生系统输出的m维可微非线性向量函数;非线性机载发动机模型输入为控制输入向量u以及上一周期的健康参数h,其输出的健康稳态参考值(x
aug,nobem
,y
nobem
)作为线性化卡尔曼滤波器当前周期的估计初始值。
[0109]
所述线性化卡尔曼滤波器的输入为测量参数y以及非线性机载发动机模型输出的健康稳态参考值(x
aug,nobem
,y
nobem
),根据公式
[0110][0111]
计算得到当前周期的发动机的健康参数h。
[0112]
其中k为卡尔曼滤波的增益,满足p为ricati方程的解;系数a
aug
和c
aug
根据公式
[0113][0114]
确定,而a、c、l、m是将健康参数h看作发动机的控制输入,并对非线性机载发动机模型在健康稳态参考点处进行线性化得到的反映发动机性能退化的增广线性状态变量模型
[0115]
[0116]
的系数:
[0117][0118][0119]
w为系统噪声,v为测量噪声,相应的协方差矩阵为对角阵q和r。
[0120]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1