一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法与流程
[0001]
本发明属于风力发电系统控制技术领域,具体涉及一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法。
背景技术:
[0002]
风能以独有的优势而成为近十年来增长最快的能源之一,正受到世界各国的重视。随着风力发电机组向着大型化、高参数化方向发展,对风力发电机组风能利用率、输出电能品质和运行平稳性的要求也越来越高。然而,风力发电系统所具有的非线性和强耦合性以及各种不确定干扰等使得当前部分经典的最大功率跟踪控制方法效果不佳,当前各国的研究重点旨在额定风速下控制风轮转速跟踪最佳转速,从而捕获更多的风能(yuan y,tang j.on advanced control methods toward power capture and load mitigation in wind turbines[j])。
[0003]
由于高度非线性、交叉耦合的系统动力学特性,以及自然风速、电网需求和系统运行工况的动态变化,对风力发电系统模型引入了较大的模型不确定性和外界扰动,进而增大了控制器设计的难度。目前最大功率跟踪常用的控制方法有最佳转矩法、功率曲线法、叶尖速比法等(jizhenliu,hongminmeng,yanghu,zhongweilin,wei wang.a novel mppt method for enhancing energy conversion efficiency taking power smoothing into account[j]),其中叶尖速比法被广泛用于理论研究。该方法主要通过在风速变化时将风力发电机的叶尖速比维持在最佳值,从而保持最大的风能捕获率。常规控制方法往往存在风轮抖振现象较严重、风能捕获效率较低等问题,降低了风力发电系统的安全性、可靠性和经济性。
技术实现要素:
[0004]
本发明的目的是为解决现有的常规控制方法存在着风能捕获效率低的问题,而提出了一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法。
[0005]
本发明为解决上述技术问题采取的技术方案是:一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法,该方法包括以下步骤:
[0006]
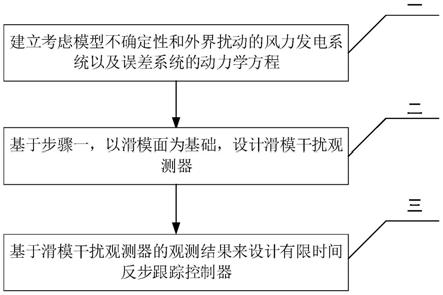
步骤一、建立考虑模型不确定性和外界扰动的风力发电系统以及误差系统的动力学方程;
[0007]
所述误差系统的动力学方程为:
[0008][0009]
式中,j为风机总的转动惯量,j
r
为低速轴的转动惯量,j
g
为高速轴的转动惯量,t
a
为气动转矩,n
g
为齿轮箱的传动比,t
g
为发电机电磁转矩,ω
r
为风轮旋转角速度,ω
ref
为风轮旋转角速度的期望值,是ω
ref
的一阶导数,e为误差变量,是e的一阶导
数,f为模型不确定性和外界扰动之和,b为风机总的阻尼系数,b
r
为低速轴的阻尼系数,b
g
为高速轴的阻尼系数;
[0010]
定义误差变量e为:
[0011]
e=ω
r-ω
ref
ꢀꢀꢀ
(2)
[0012]
ω
r
=ω
ref
=λ
opt
v/r
ꢀꢀꢀ
(3)
[0013]
式中,v为风速,λ
opt
为最佳叶尖速比,r为风轮半径;
[0014]
步骤二、以滑模面为基础,设计滑模干扰观测器;
[0015]
步骤三、基于滑模干扰观测器的观测结果来设计有限时间反步跟踪控制器,利用设计的有限时间反步跟踪控制器来对风力发电系统进行控制。
[0016]
本发明的有益效果是:本发明的一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法,本发明可以对系统干扰进行观测并于控制器中进行处理,能够在有限的时间内获得所需的稳态精度。通过设计合适的控制器来控制发电机转矩t
g
,使风轮转速ω
r
更快地跟踪期望风轮转速ω
ref
且误差变量在有限时间内收敛,可以有效提高风能捕获效率。实现在低风速区对最佳叶尖速比的跟踪控制。
附图说明
[0017]
图1是本发明的一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法的流程图;
[0018]
图2是仿真使用的风速曲线图;
[0019]
图3是干扰观测曲线图;
[0020]
图4是最佳转速跟踪曲线图;
[0021]
图5是最佳转速跟踪误差曲线图。
具体实施方式
[0022]
具体实施方式一:如图1所示,本实施方式所述的一种基于观测器的风力发电机最佳转速有限时间跟踪控制方法,该方法包括以下步骤:
[0023]
步骤一、建立考虑模型不确定性和外界扰动的风力发电系统以及误差系统的动力学方程;
[0024]
所述误差系统的动力学方程为:
[0025][0026]
式中,j为风机总的转动惯量,j
r
为低速轴的转动惯量,j
g
为高速轴的转动惯量,t
a
为气动转矩,n
g
为齿轮箱的传动比,t
g
为发电机电磁转矩,ω
r
为风轮旋转角速度,ω
ref
为风轮旋转角速度的期望值,是ω
ref
的一阶导数,e为误差变量,是e的一阶导数,f为模型不确定性和外界扰动之和,通常是未知的,b为风机总的阻尼系数,b
r
为低速轴的阻尼系数,b
g
为高速轴的阻尼系数;
[0027]
定义误差变量e为:
[0028]
e=ω
r-ω
ref
ꢀꢀꢀ
(2)
[0029]
ω
r
=ω
ref
=λ
opt
v/r
ꢀꢀꢀ
(3)
[0030]
式中,v为风速,λ
opt
为最佳叶尖速比,r为风轮半径;
[0031]
步骤二、以滑模面为基础,设计滑模干扰观测器;
[0032]
步骤三、基于滑模干扰观测器的观测结果来设计有限时间反步跟踪控制器,利用设计的有限时间反步跟踪控制器来对风力发电系统进行控制。
[0033]
本实施方式中的低速轴是指风力发电系统的两个轴中转速较低的轴,高速轴是指风力发电系统的两个轴中转速较高的轴。低速轴与高速轴是两个轴的相对概念。
[0034]
本发明中进行反步控制,反步控制其基本思想依旧是反馈控制,但是在此基础上将系统分为了下一阶输出作为上一阶子系统输入的多个子系统,并利用lyapunov函数对每一阶子系统进行了处理以得出相应的虚拟输入,并以此方法设计下一阶子系统的输入,直到最终得出实际输入,综合以上处理步骤,即可完成反步控制律的设计。
[0035]
本发明设计干扰观测器,干扰观测器的基本设计原理是将风机控制系统中存在的参数摄动项、模型不确定项及外界干扰等未知项组合为扰动集总项,再根据可测得的系统状态构建观测器系统,在线逼近扰动集总项,最后利用扰动集总项的观测值设计相应的控制器,从而提升系统对最佳转速的跟踪性能。
[0036]
具体实施方式二:本实施方式与具体实施方式一不同的是:所述考虑模型不确定性和外界扰动的风力发电系统的动力学方程为:
[0037][0038]
式中,为风轮旋转角加速度。
[0039]
具体实施方式三:本实施方式与具体实施方式二不同的是:所述模型不确定性和外界扰动之和f的表达式为:
[0040]
假定f是有界的,
[0041][0042]
式中,|f|表示f的绝对值,l表示不确定性的上界,表示模型不确定性,d表示外界扰动。l∈r为正数。
[0043]
具体实施方式二的系统中存在系统不确定性和干扰f,为实现较短时间内对扰动值的估计,采用滑模干扰观测器进行逼近。
[0044]
具体实施方式四:本实施方式与具体实施方式三不同的是:所述步骤二的具体过程为:
[0045]
选择滑模面函数为:
[0046]
s=ρ
0-ω
r
ꢀꢀꢀ
(6)
[0047]
式中,s为滑模面,ρ0为中间变量,ρ0的一阶导数的形式为:
[0048][0049]
式中,j-1
为j的逆,为ρ0的一阶导数,k1为正数,k1∈r(r代表实数域),0<r<1,sign(
·
)为符号函数;
[0050]
则模型不确定性和外界扰动之和f的观测值为:
[0051][0052]
式中,为s的一阶导数。
[0053]
定义,如果存在0<a1<1和0<a2<2,那么对于r
i
(i=1,
…
,n),以下不等式被满足:
[0054][0055][0056]
此外,本发明中sign代表符号函数,对于向量
[0057]
ξ=[ζ1…
ζ
n
]
t
ꢀꢀꢀ
(11)
[0058]
存在下列等式
[0059]
ζ
α
=[|ζ1|
α
sign(ζ1)
…
|ζ
n
|
α
sign(ζ
n
)]
t
ꢀꢀꢀ
(12)
[0060]
sign(ζ)=[sign(ζ1)
…
sign(ζ
n
)]
t
ꢀꢀꢀ
(13)
[0061]
具体实施方式五:本实施方式与具体实施方式四不同的是:所述有限时间反步跟踪控制器为:
[0062][0063]
式中,k2、k3和a为待设计的控制参数,0<a<1。k2,k3为正数,k2∈r,k3∈r(r代表实数域)。
[0064]
具体实施方式六:本实施方式与具体实施方式五不同的是:所述气动转矩t
a
的表达式为:
[0065][0066]
式中,ρ为空气密度,r为风轮半径,c
p
(λ,β)为风能利用系数,λ为叶尖速比,β为叶片桨距角,风能利用系数c
p
(λ,β)是叶尖速比λ和叶片桨距角β的非线性函数。
[0067]
本发明的相关关键技术
[0068]
风力发电系统的动力学方程(基于高阶滑模观测器的风机改进反演滑模控制[j]):
[0069][0070]
式中,ω
r
为风轮旋转角速度,j
r
为低速轴的转动惯量,b
r
为低速轴的阻尼系数,j
g
为高速轴的转动惯量,t
a
为气动转矩,t
g
为发电机电磁转矩,b
g
为高速轴阻尼系数,n
g
为齿轮箱的传动比。
[0071]
气动转矩t
a
:
[0072][0073]
式中,ρ为空气密度,r为风轮半径,v为风速,风能利用系数c
p
是叶尖速比λ和叶片
桨距角β的非线性函数。
[0074]
期望风轮转速ω
ref
[0075]
ω
r
=ω
ref
=λ
opt
v/r
ꢀꢀꢀ
(18)
[0076]
其中v为风速,λ
opt
最佳叶尖速比,r为风轮半径。
[0077]
本发明的理论基础部分
[0078]
1.1风力发电系统模型
[0079]
假设低速轴是完全刚性的,那么一个风力发电系统的动力学模型可表示为:
[0080][0081]
式中,ω
r
为风轮旋转角速度,j
r
为低速轴的转动惯量,b
r
为低速轴的阻尼系数,j
g
为高速轴的转动惯量,t
a
为气动转矩,t
g
为发电机电磁转矩,b
g
为高速轴阻尼系数,n
g
为齿轮箱的传动比,f为系统不确定性和干扰,通常是未知的。
[0082]
气动转矩t
a
为
[0083][0084]
式中,ρ为空气密度,r为风轮半径,v为风速,风能利用系数c
p
是叶尖速比λ和叶片桨距角β的非线性函数。
[0085]
假定f是有界的,则可表示为:
[0086][0087]
式中,δ表示不确定性的上界。
[0088]
风电机组在额定风速以下的控制目标是最大限度的捕获风能。若要实现风电系统输出功率的最大化,则需要使c
p
(λ,β)处于最大值。由于c
p
(λ,β)是以λ和β为变量的函数,在保持桨距角β不变的情况下(通常在0
°
附近),通过调节发电机转矩t
g
间接地改变风轮转速ω
r
,从而使其更好地跟踪最佳叶尖速比λ
opt
。
[0089]
期望风轮转速ω
ref
可计算为
[0090]
ω
r
=ω
ref
=λ
opt
v/r
ꢀꢀꢀ
(22)
[0091]
其中v为风速。
[0092]
使用叶尖速比来实现最大功率的跟踪通常需要对风速进行估计。常用的估计方法有通过观测器观测、使用卡尔曼滤波和牛顿-拉夫逊算法等,均有较好的估计效果。本发明专利假设风速的估计值与真实值相等。
[0093]
由此本发明专利的目标可以表述为:设计一个改进性能函数的预设性能控制器来控制发电机转矩t
g
,使风轮转速ω
r
更快地跟踪期望风轮转速ω
ref
。误差变量定义为e=ω
r-ω
ref
。
[0094]
1.2有限时间控制的定义
[0095]
考虑如下系统:
[0096]
[0097]
式中,f:u0×
r
→
r
n
在u0×
r上连续,u0为原点x=0处的一个邻域。对于所考虑的系统(23),非线性控制系统有限时间稳定性理论定义如下:假设存在一个定义在原点的邻域上的光滑函数v(x),并且存在实数p>0,0<α<1以及d>0使得v(x)在上正定和在上半负定或在上半负定,则系统的原点是有限时间稳定的,停止时间依赖于初始值
[0098]
x(0)=x0ꢀꢀꢀ
(24)
[0099]
1.3反步控制方法
[0100]
定义误差变量定义为
[0101]
e=ω
r-ω
ref
ꢀꢀꢀ
(25)
[0102]
则根据式(19)(22)得到误差系统为:
[0103][0104]
1.4滑模干扰观测器设计
[0105]
系统(26)中存在系统不确定性和干扰f,为实现较短时间内对扰动值的估计,采用滑模干扰观测器进行逼近,选择滑模面函数为
[0106]
s=ρ
0-ω
r
ꢀꢀꢀ
(27)
[0107]
式中,ρ0为中间变量,其形式可描述为:
[0108][0109]
式中,k1∈r为正数,0<r<1,l∈r为正数。
[0110]
则外界干扰观测值为
[0111][0112]
定义,如果存在0<a1<1和0<a2<2,那么对于r
i
(i=1,
…
,n),以下不等式被满足:
[0113][0114][0115]
此外,本发明中sign代表符号函数,对于向量
[0116]
ξ=[ζ1…
ζ
n
]
t
ꢀꢀꢀ
(32)
[0117]
存在下列等式
[0118]
ζ
α
=[|ζ1|
α
sign(ζ1)
…
|ζ
n
|
α
sign(ζ
n
)]
t
ꢀꢀꢀ
(33)
[0119]
sign(ζ)=[sign(ζ1)
…
sign(ζ
n
)]
t
ꢀꢀꢀ
(34)
[0120]
证明:采用如下的lypunov函数:
[0121][0122]
对上式求导可以得到:
[0123][0124]
由式(35)和式(36)可以得
[0125][0126]
则根据有限时间理论可知滑模干扰观测器可以在有限时间内估计出干扰来。
[0127]
1.5有限时间反步跟踪控制器设计
[0128]
考虑到系统存在的不确定性和干扰f,本发明提出如下有限时间反步控制律:
[0129][0130]
式中j=j
r
+n
g2
j
g
,b=b
r
+n
g2
b
g
,表示不确定性的观测值,k2、k3、a为待设计的控制参数,0<a<1。
[0131]
证明:取
[0132][0133]
则
[0134][0135]
将t
g
代入式(40)得
[0136][0137]
式中,α=-λ
min
(k2),β=-λ
min
(k3)
[0138]
则根据有限时间控制理论,e在有限时间收敛。
[0139]
2.与现有技术方案的比较
[0140]
如果要实现在额定风速以下、模型不确定性和未知干扰等影响下的风力发电机转速跟踪的控制要求,除了本发明算法外还有基于干扰处理的方案、传统反步控制等方案,以下简单介绍这两种方案,并将它们与本发明算法进行比较。
[0141]
2.1基于干扰处理的方案
[0142]
由于存在风力发电机模型不确定性或未知的外部扰动问题,使用观测器估计上述扰动或用自适应方法,通过结合一些常用的控制方法,如pid控制、滑模控制、反步控制等,从而获得相对较好的控制方案。如文献(基于自适应反演滑模优化算法的风机mppt控制[j])通过设计一种滑模观测器估计干扰来设计控制器。文献(yanayang,chaoge,hongwang,xiaoyili,changchunhua.adaptiveneuralnetworkbasedprescribedperformancecontrolforteleoperationsystemunderinputsaturation[j])采用径向基函数神经网络(radial basis function neural network,rbfnn)来逼近未知的动力学特性。文献(基于非线性干扰观测器的风电机组自适应反演滑模控制[j])使用一种非线性干扰观测器观测干扰从而
设计控制算法。
[0143]
但是与本发明算法相比,上述方案因为计算量过大而无法满足系统快速性的要求。本发明算法通过有限时间控制方法可以使系统在有限时间内达成控制目标,更贴近实际的工程需求。
[0144]
2.2基于传统反步控制的方案
[0145]
反步设计方法是一种针对控制对象的变化和环境干扰影响而提出的控制策略,文献(一种混沌系统的改进反演自适应模糊控制[j])将反演思想与模糊控制系统结合实现了很好的控制跟踪效果。其思想是采用递归设计方法,很好地解决了对象参数不确定的鲁棒控制问题。但未考虑系统外界扰动对系统的影响。但是与本发明算法相比,上述方案没有考虑控制系统中存在干扰问题,且设计的算法无法实现有限时间控制。
[0146]
本发明算法对传统反步控制方法进行了改进,采用了有限时间干扰观测器与有限时间控制方法,可以对系统干扰进行观测并于控制器中进行处理,并能够在有限的时间内获得所需的稳态精度。
[0147]
3.仿真算例
[0148]
3.1仿真准备
[0149]
为验证本发明所设计控制方法的有效性,将其应用到一种风力发电机模型中进行仿真验证,并考虑模型不确定性和干扰所造成的影响。所用5mw风力发电机参数如表1所示(基于自适应非奇异快速终端滑模的风力发电机最大功率跟踪控制[j])。
[0150]
表1风力发电机参数
[0151][0152]
本发明将不同频率的两种正弦信号叠加,作为输入的风速,风速曲线如图1所示。
[0153]
为了验证所设计观测器的有效性,加入f=100sint作为系统的随机干扰,滑模干扰观测器参数如表2所示。
[0154]
表2滑模干扰观测器参数
[0155][0156]
为了验证所设计控制器的有效性,有限时间反步参数如表3所示。
[0157]
表3有限时间反步控制器参数
[0158][0159]
3.2仿真分析
[0160]
时变干扰观测曲线如图3所示。
[0161]
最佳转速跟踪曲线与最佳转速跟踪误差曲线如图4和图5所示。
[0162]
由图3、图4、图5可以看出,外界干扰可以在较短时间内被观测器观测得出,跟踪误差可以在较短时间内收敛到较小的的稳态精度。证明基于观测器的反步控制方法可以在有限的时间内获得所需的稳态精度,并具有较好的鲁棒性。
[0163]
本发明的上述算例仅为详细地说明本发明的计算模型和计算流程,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1