控制来自风力涡轮机的个体叶片的噪声排放的制作方法
1.本发明总体上涉及控制来自风力涡轮机的个体叶片的噪声排放。
背景技术:
2.使用风力涡轮机控制技术进行功率的优化和负荷的最小化。诸如空气动力负荷、重力负荷、离心负荷和惯性负荷这样的许多不同的负荷作用在风力涡轮机上。风力涡轮机所经历的负荷变化可能是由风力涡轮机附近的风条件(例如,风切变或湍流)引起的,或者可能是由改变风力涡轮机的操作(例如,电网损耗)引起的。
3.已知的是风力涡轮机从不同的源产生声音或噪声。例如,机械源包括传动系调性,并且已知用于降低这种机械诱发噪声水平的方法。气动声源通常源自转子叶片周围的气流,并可以是风力涡轮机噪声排放的最大组成。气动声学机制包括低频声、入流湍流声和叶片自噪声。当旋转的叶片遇到尾流或风速变化时,会出现低频声。入流湍流声可能是由湍流风引起的压力波动导致的。叶片自噪声可能是由沿着叶片表面流动的空气导致的。已知用于降低来自以上提到的各种源的平均气动声学噪声的方法。
4.在风力涡轮机转子旋转时噪声水平的变化可以被称为振幅调制的气动声学噪声。这种振幅调制的噪声通常可以由风场中的不均匀性(诸如风切变)产生,或者可能是因为变桨控制动作产生的。用于降低振幅调制的气动声学噪声的方法有可能给风力涡轮机控制系统增加不适当的复杂性。
5.本发明正是在以上背景下提出的。
技术实现要素:
6.根据本发明的一方面,提供了一种控制来自风力涡轮机的个体叶片的噪声排放的方法。该方法可以包括定义风力涡轮机模型,风力涡轮机模型描述风力涡轮机的动力学,其中,风力涡轮机模型可以包括对随着方位角的变化而变化的来自每个个体叶片的噪声排放的强度和方向的描述。该方法可以包括:通过使用风力涡轮机模型,应用基于模型的控制算法来确定至少一个控制输出。该方法可以包括使用至少一个控制输出来控制来自每个个体叶片的噪声排放。
7.风力涡轮机模型可以描述来自每个个体叶片的多个叶片段中的每个的噪声排放。
8.风力涡轮机模型可以基于偶极子辐射图描述噪声排放。
9.噪声排放的方向可以是取决于每个个体叶片的前缘和后缘的相对位置而确定的。
10.噪声排放可以是取决于转子速度而确定的。
11.在一些实施方式中,描述来自每个个体叶片的噪声排放包括:确定随着方位角的变化而变化的风速。
12.在一些实施方式中,随着方位角的变化而变化的风速基于个体叶片的叶片负荷。
13.在一些实施方式中,应用基于模型的控制算法包括使用风力涡轮机模型在预测范围内预测每个个体叶片的噪声排放。在一些实施方式中,应用基于模型的控制算法包括基
于所预测的噪声排放来确定至少一个控制输出。
14.该方法可以包括将所预测的噪声排放用在风力涡轮机模型的成本函数中。该方法可以包括优化成本函数以确定至少一个控制输出。
15.成本函数可以包括与所预测的噪声排放关联的一个或更多个惩罚参数,以惩罚以下中的一个或更多个:来自个体叶片的振幅调制的气动声学噪声排放;在相对于机舱取向的一个或更多个具体方向上的噪声排放;以及在一个或更多个具体地理方向上的噪声排放。
16.至少一个控制输出可以是取决于以下中的至少一个而确定的:风力涡轮机附近的地形类型;风力涡轮机的地理位置;相对于风力涡轮机的栖息地位置;大气条件;以及一天中的时间。
17.至少一个控制输出可以包括对个体叶片的桨矩控制。
18.根据本发明的另一方面,提供了一种非暂态计算机可读存储介质,在该非暂态计算机可读存储介质上存储有指令,该指令在由处理器执行时致使处理器执行上述方法。
19.根据本发明的另一方面,提供了一种用于控制来自风力涡轮机的个体叶片的噪声排放的控制器。控制器可以被配置为定义风力涡轮机模型,风力涡轮机模型描述风力涡轮机的动力学,其中,风力涡轮机模型可以描述随着方位角(312)的变化而变化的来自每个个体叶片的噪声排放的强度和方向。控制器可以被配置为通过使用所述风力涡轮机模型,应用基于模型的控制算法以确定至少一个控制输出。控制器可以被配置为使用至少一个控制输出来控制来自每个个体叶片的噪声排放。
20.根据本发明的另一方面,提供了一种用于控制来自包括多个风力涡轮机的风电场的噪声排放的控制器。控制器可以被配置成定义风力涡轮机模型,风力涡轮机模型描述多个风力涡轮机中的每个的动力学。每个风力涡轮机模型可以描述随着方位角的变化而变化的来自每个风力涡轮机的每个个体叶片的噪声排放的强度和方向。控制器可以被配置为通过使用风力涡轮机模型,应用基于模型的控制算法来确定风力涡轮机中的每个的至少一个控制输出。控制器可以被配置为使用至少一个控制输出来控制来自风力涡轮机中的每个的每个个体叶片的噪声排放。
21.根据本发明的另一方面,提供了一种包括如上所述的控制器的风力涡轮机。
22.根据本发明的另一方面,提供了一种风电场,该风电场包括均具有如上所述的控制器的多个风力涡轮机。该风电场可以包括风电场控制器,风电场控制器被配置为:基于一个或更多个接收到的噪声参数来确定来自风电场的噪声排放的允许水平;基于噪声排放的所述允许水平来确定噪声排放约束;并且将噪声排放约束分配给风力涡轮机的控制器中的每个。风力涡轮机的控制器中的每个被配置为通过使用风力涡轮机模型,应用基于模型的控制算法以确定服从所分配的噪声排放约束的至少一个控制输出。风电场控制器可以针对风电场中的风力涡轮机中的每个确定不同的噪声排放约束。
附图说明
23.现在,将通过示例的方式参考附图来描述本发明的一个或更多个实施方式,在附图中:
24.图1示出了根据本发明的示例的风力涡轮机;
25.图2示出了图1的风力涡轮机的控制器以及风力涡轮机的将由控制器控制的致动器系统;
26.图3示出了图2的控制器的组成部分,具体地,根据本发明的示例的估计器单元和模型预测控制单元;
27.图4a示出了风力涡轮机叶片位置的方位角图,图4b示出了针对方位角位置的叶片风速图,并且图4c示出了在预测范围内给定叶片的估计叶片风速图;
28.图5示出了图1的风力涡轮机的转子叶片之一的立体图;
29.图6示意性示出了来自图1的风力涡轮机的叶片段的噪声排放,该噪声排放被描述为偶极子辐射图;
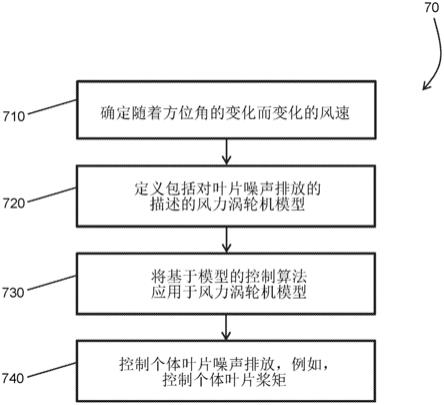
30.图7概述了根据本发明的示例的由图2的控制器执行的方法步骤;以及
31.图8示意性示出了具有多个图1中的风力涡轮机并与栖息地位置相邻的风电场。
具体实施方式
32.图1示出了风力涡轮机10,本发明的实施方式可以被纳入风力涡轮机10。风力涡轮机10包括塔架12,塔架12支撑机舱14,转子16安装到机舱14。转子16包括从轮毂20径向延伸的多个风力涡轮机叶片18。在该示例中,转子16包括三个叶片18,尽管其他配置是可能的。
33.在每个叶片18内示出了叶片负荷传感器181(在其他示例中,可以存在允许叶片负荷由不止单个变量表示的多个叶片负荷传感器)。感测元件可以是光纤应变计、电阻式应变计或任何其他适当的检测器。还示出了转子风速检测器182——另外,该测量可以以如技术人员将理解的几种方式执行,一种是通过lidar,技术人员会根据风力涡轮机设计和控制的文献来理解lidar。还示出了旋转速度传感器183——这可以是例如在涡轮机10的发电机轴上的旋转编码器的形式;然而,转子速度可以按任何合适的方式确定。
34.图2示出了按照本发明的示例的风力涡轮机控制系统22,可以在图1的风力涡轮机10中实现风力涡轮机控制系统22。这里,控制系统22包括由控制器26控制的致动器系统24。在该具体实施方式中,致动器系统24可以是或可以包括用于控制一个或更多个风力涡轮机叶片18的桨距的变桨系统,该变桨系统可以包括布置为以已知方式调整叶片桨距的液压致动器28。致动器28的实际位置能由向液压致动器28提供定位命令信号的致动器位置控制单元30控制。
35.应该理解,控制器26和致动器系统24可以针对风力涡轮机10的每个叶片18进行复制,使得每个叶片18的位置可以被独立地控制——在这里描述的示例中,这样做是为了针对每个叶片18提供个体桨距控制。
36.在这一点上应该注意,风力涡轮机10的变桨系统只是可以被控制的风力涡轮机系统的一个示例,并且控制器26还可以用于控制其他风力涡轮机系统。例如,致动器系统24可以是用于风力涡轮机10的机舱14的电动或液压偏航驱动器,以提供机舱14相对于塔架12的旋转位置控制。另一示例将是转换器控制系统,在该转换器控制系统中,致动器系统24可以是风力涡轮机10的发电系统的功率转换器,该功率转换器在称为“全功率转换”的过程中将由发电机输送的ac电转换为经由dc链路输出的变频ac电。本领域的技术人员将理解,本文中描述的本发明的原理可以应用于任何需要高速实时控制的风力涡轮机系统。
37.在本发明的一个示例方法中,可以控制风力涡轮机10的个体叶片18的桨矩,以在
风力涡轮机10操作期间控制来自叶片18的噪声排放。具体地,可以控制个体叶片18的噪声排放的强度和方向。定义了描述来自个体叶片18的噪声排放的强度和方向的风力涡轮机模型。在所描述的示例中,针对个体叶片18的局部风速的估计值被确定为随着叶片方位角的变化而变化,并且这些局部风速用来对叶片噪声排放进行建模。在所描述的示例中,使用风力涡轮机模型在预测范围内预测每个个体叶片的噪声排放,并且将所预测的噪声排放用在被优化以确定个体桨距的成本函数或性能函数中,从而控制个体叶片18的桨距。通过以这种方式独立地控制每个叶片的桨矩,即使在复杂的环境条件下,也可以有效地减少来自叶片的总体振幅调制的气动声学噪声——即,在转子叶片18旋转时的噪声变化——或在一定叶片方位角处的具体方向上的噪声。下面,对此进行更详细的描述。
38.图3中示意性示出了在控制器26中实现该方法的具体示例。示出了两个功能元件——估计单元31(或简称为估计器31)和模型预测控制单元或优化单元32。这两个单元都可以通过使用常规或客户处理器和存储器在任何合适的计算基板上运行的合适软件来提供。估计器单元31和优化单元32可以使用公共计算基板(例如,它们可以在同一服务器上运行)或单独的基板,或者一者或二者本身可以分布在多个计算装置之间。
39.在所描述的示例中,估计器单元31接收风速估计值311、来自具有关联方位角312的每个叶片18的叶片负荷传感器181的叶片负荷值313以及来自旋转速度传感器183的转子速度314作为输入。作为来自优化单元32的输出推导为预测范围内的预测轨迹的个体叶片桨矩332也被反馈到估计器单元31。来自估计器单元31的输出包括如以下讨论的风力涡轮机模型321(包括对预测范围内来自个体叶片18的噪声排放的描述),并且这被作为输入馈送到优化单元32。优化单元32根据服从于多个目标和约束322确定的优化结果针对风力涡轮机10提供个体叶片桨距控制331。具体地,服从于关于来自个体叶片18的噪声排放的一个或更多个约束执行优化。
40.这种方法是有效的,因为它允许控制模型的凸优化,尽管描述作用在叶片上的力的函数是总体非线性的(所述力导致来自叶片的振幅调制的气动声噪声排放)。凸优化通常需要线性系统,因此模型预测控制在其目标方面通常受到需要获得有效优化的限制。进行个体叶片18的桨距控制以控制来自个体叶片18的噪声排放是可能的,因为该方法允许在估计器单元31中应对非线性,从而使得模型预测控制单元32的模型能够在基于能够凸优化的模型的同时具有个体叶片桨距输出。替代地,非线性被包含在每个叶片18在预测范围内所经历的风速和负荷内。
41.现在描述局部风速计算,之后局部风速用来创建由个体叶片18产生的噪声排放的模型。图4a示出了围绕转子20的盘41如何可以被表示为多个均具有其自身方位角的转子位置411。为了估计局部风速,估计器31使用适于基于状态模型和随时间推移的测量值来估计系统状态变量的未知输入观察器。估计器31可以使用卡尔曼滤波,例如,扩展卡尔曼滤波(ekf),尽管技术人员将理解可以使用其他形式的未知输入估计器函数。叶片空气动力学通常将是非线性的,从而需要使用适于用在非线性系统中的方法。
42.ekf依赖模型和时变输入。该模型是风力涡轮机10的物理系统的模型,此模型允许用可用输入计算相关输出。关键输入是每个叶片18的叶片负荷值313以及转子风估计值311。转子风估计值311是在整体转子20上求平均的风速的估计值。转子风估计值可以按以下多种方法中的一种推导出:将机舱14上的风速计用作整体转子的代表性测量;用已知的
桨矩角、旋转速度和电网功率值进行计算(例如,通过在cp表中查找);或者通过估计过程。物理模型允许基于物理系统的工程分析用叶片负荷值313和整体转子风估计值311来确定叶片18所经历的风速。
43.该方法允许确定每个方位角位置的风速,从而根据方位角位置针对每个叶片18提供风值图。当叶片18移动经过相关方位角位置时,更新估计器31的值,从而导致相关输入值(诸如,叶片负荷313)被更新。ekf的输出是局部风速对照方位角的图,如图4b中例示的。
44.估计器31使用从ekf推导出的风值图,并使用当前转子方位角312和所预测的转子速度作为其他输入,以使得在未来时段内能够检测每个叶片18的位置。因此,如图4c中例示的,估计器31能够产生每个叶片18在其路径内在预测范围内所经历的局部风速。该预测范围将被设置为足够长以允许有效的模型预测控制,但足够短以使在整个预测时段中预测值的准确性仍有合理的置信度。
45.然后,估计的叶片局部风速可以用来创建每个个体叶片18的噪声排放模型。然后,噪声排放模型可以用在描述风力涡轮机10的动力学(包括叶片噪声排放)的风力涡轮机模型321中,风力涡轮机模型321进而用在优化问题中。
46.图5示出了风力涡轮机10的通常具有翼型剖面的个体叶片18之一。具体地,图5指示了叶片18的用于附接到转子20的根端部51和与根51相对的端部处的尖52,其中在根51与尖52之间限定了叶片跨度53。叶片18具有前缘54和后缘55,在前缘54和后缘55之间限定了叶片弦长56。
47.对于本示例,叶片18沿着叶片跨度53被划分为多个叶片段57。每个叶片段57的叶片噪声排放被描述为包括在该模型中,因为噪声排放将沿着叶片跨度53变化。叶片18可以沿着跨度53被划分为任意合适数量的叶片段57。沿着叶片18的更大数量的叶片段57可以得到对叶片噪声排放的更准确描述;然而,这可能增加执行模型的优化所需的计算资源。
48.来自每个叶片段57的噪声排放被建模为射频偶极子辐射图,并且在图6中示意性例示了这种图60的示例。也就是说,来自叶片段57的噪声排放被假定为类似于偶极子声源表现。偶极子图60指示来自叶片段57的噪声排放是高度定向的。在具体时间步长处来自叶片段57的噪声排放的具体方向和强度将取决于许多不同的参数。在图6的示意性示例中,这可以是掷入风中的叶片的噪声排放图,其中方向w为如图6中指示的从左到右并且风力涡轮机10的转子平面x如图6中指示的。示意性偶极子图60关于平面x对称;然而,通常,情况并非如此。然而,要注意,某些方向上的噪声排放比其他方向强得多。在所例示的示例中,沿着平面x的方向是来自叶片段57的最低噪声水平的排放处。在图6中示出的示例中,噪声排放被确定为二维图或图;然而,在其他示例中,这可以容易地扩展到三维。
49.具体叶片的各段57的偶极子或噪声图60将沿着叶片18变化,特别是偶极子60的大小和方向。这是因为基于包括叶片方位角312、叶片桨矩角、旋转速度314和叶片局部风速的多个参数来确定在具体时刻的各叶片段57的偶极子60。例如,靠近叶根51的叶片段57的旋转速度将小于靠近叶片尖52的叶片段57的旋转速度。前缘54和后缘55的相对位置将确定偶极子图的取向,即,来自叶片段的噪声排放最大的方向。噪声排放的方向也高度依赖于叶片段18的瞬时方位角。
50.在给定的时间步长,对操作状态进行采样以给出各种操作参数(包括如上所述估计的叶片局部风速)的测量值和/或估计值,并且基于当前操作状态来确定或模拟各叶片段
57的噪声排放图。这可以用来确定每个叶片18和风力涡轮机10的总噪声排放图(包括声强度和噪声方向)。所描述示例中的噪声排放图或模型是准静态的,从而允许在风力涡轮机模型中包括叶片噪声排放动力学,而没有增加可能致使优化算法在计算上不可行的复杂性。要注意,噪声排放图是实时在线计算出的。虽然这需要相对高的计算能力,但这带来的益处是能够利用瞬时风速来提高准确性。然而,在不同的示例中,噪声排放图可以是离线计算出的。
51.图7概述了由控制器26执行的使风力涡轮机10的电力输出最大化同时将叶片噪声排放维持在允许水平以下的方法70的步骤。在步骤710中,控制器26确定如上所述的随着方位角的变化而变化的叶片局部风速。
52.在步骤720中,定义描述风力涡轮机10的一个或更多个部件的动力学的风力涡轮机模型。具体地,上述噪声排放图(该噪声排放图是基于包括叶片局部风速的各种参数确定的)被包括在风力涡轮机模型中。除了包括对随着方位角312的变化而变化的来自每个个体叶片18的噪声排放的强度和方向的描述之外,风力涡轮机模型还可以包括对以下中的一个或更多个的描述:塔架振动、倾斜和/或偏航负荷和塔架间隙控制;以及风力涡轮机10所产生的电力输出。风力涡轮机模型还可以包括对其他风力涡轮机动力学的描述。
53.在步骤730中,将基于模型的控制算法应用于风力涡轮机模型,以在具体采样时刻基于风力涡轮机模型的输入来确定用于控制风力涡轮机的控制输出。在所描述示例中,应用预测控制算法(具体地,模型预测控制算法)来产生控制输出。控制器26使用所定义的风力涡轮机模型来基于针对从当前时间步长开始的有限数量的时间步长中的每个接收到的输入值或参数来预测在预测范围内风力涡轮机模型的一个或更多个变量的轨迹。具体地,输入参数包括所估计的叶片噪声排放(其包括方向和强度)。在估计单元31中,针对随着时间推移的最佳轨迹在预测范围内预测叶片噪声排放图。在所描述示例中,风力涡轮机模型描述了随着叶片局部风速的变化而变化的叶片噪声排放。如上所述并如图4c中例示的,在预测范围内预测叶片局部风速。然后,用在预测范围内预测的叶片局部风速确定预测范围内的所预测的叶片噪声排放。所预测的风力涡轮机模型321被输入到优化单元32。优化单元32还接收各种目标和约束322,优化将基于所述各种目标和约束322。可以施加针对叶片噪声排放的多种不同的约束以及针对其他涡轮动力学的约束。
54.在步骤740中,在优化单元32中使用风力涡轮机模型并服从于所预测的或以其他方式得到的目标和约束来解决优化问题。具体地,所预测的风力涡轮机行为(包括所预测的叶片噪声排放)用在成本函数中,然后服从约束(包括针对叶片噪声排放的任何约束)来优化该成本函数,以确定至少一个控制输出331来控制叶片噪声排放。具体地,可以控制个体叶片18的桨矩,以控制个体叶片噪声排放,并且通过扩展,控制整个风力涡轮机10的噪声排放。具体地,根据模型预测控制算法来解决优化问题,以确定模型变量中的每个的最优轨迹。模型预测控制算法确定预测范围内的控制输出,以控制风力涡轮机10根据最佳轨迹操作。通常,在模型预测控制方法中,然后仅由控制器26实现对应于预测范围内的第一时间步长的控制输出。然后,重复方法步骤,以确定在下一个时间步长中要实现的控制输出。
55.本发明的实施方式和示例的优点在于,对风力涡轮机的个体叶片的噪声排放(具体地,其方向)的描述可以被包括在风力涡轮机模型中(基于模型的控制算法应用于该风力涡轮机模型),使得按考虑到噪声排放的方式确定控制输出。具体地,通过包括对来自叶片
的噪声排放的方向随着转子旋转(即,针对不同叶片方位角)如何变化的描述,可以控制控制输出(诸如个体叶片的叶片桨矩),以按所期望的方式控制噪声排放。例如,可以通过在转子旋转时控制个体叶片的桨矩来降低在相对于机舱取向的某些方向上的噪声排放。另选地,或者另外地,可以减小在转子单次旋转时叶片噪声排放的变化水平,即,可以减小振幅调制气动声学噪声。
56.本发明的实施方式和示例的优点在于,可以保持风力涡轮机的平均电力输出,同时控制叶片噪声排放以减少其对周遭的影响。例如,可以通过例如控制个体叶片桨矩来控制噪声排放,使得与水平方向上比,在竖直方向上排放的叶片噪声量更大。例如,风力涡轮机可以邻近或靠近栖息地(无论它是诸如村庄或城镇这样的人类栖息地还是它是诸如森林这样的动物栖息地)定位。在这种情况下,风力涡轮机模型可以考虑风力涡轮机的相对于栖息地的地理位置和/或机舱取向,并适当地控制噪声排放,例如,减少从风力涡轮机朝向栖息地的方向上的噪声排放,使得代替地将噪声排放导向不同的方向,例如,在竖直方向上背离风力涡轮机。
57.在风力涡轮机模型中,除了相对地理位置外,还可以考虑其他参数作为针对叶片噪声排放的约束。例如,风力涡轮机控制器可以知悉(内置地或通过测量或估计)风力涡轮机附近的地形类型、风力涡轮机附近的大气条件和一天中的时间中的一个或更多个。例如,不同类型的地形可以不同程度地反映所产生的声音信号,使得所产生的噪声排放可以根据风力涡轮机周围的地形类型进一步传播,这意味着对于具有相对大的声音反射性的地形附近的涡轮机,可能需要将叶片噪声排放控制为较低。类似地,所产生的叶片噪声在不同的大气条件下可以传播不同距离,因此在控制噪声排放时可以考虑这一点。一天中的时间可以影响噪声排放的允许水平,例如,如果风力涡轮机靠近栖息地,则夜间允许的噪声排放可以低于白天里。
58.本发明的实施方式和示例的优点在于,在某些条件下(所述条件自然导致噪声排放较低,特别是较低的振幅调制的气动声学噪声),例如相对温和的天气条件下,风力涡轮机的电力输出可以增加或最大化。在这种情况下,风力涡轮机可以加速运行以增加电力输出,同时停留在噪声排放的允许水平内。
59.本发明的实施方式和示例的优点在于,可以通过在转子旋转时控制叶片噪声排放来补偿风切变、可改变风向以及涡轮机和叶片磨损的影响(所有这些都可能造成相对大的(周期性)噪声变化),由此降低振幅调制的气动声学噪声。
60.本发明的实施方式和示例的优点在于,本发明允许在叶片或涡轮机负载与对应的噪声排放之间进行折衷。例如,假如噪声排放不超过允许水平,可以允许稍高的噪声排放水平,以减小风力涡轮机叶片上的负荷。
61.图8示意性例示了根据本发明的示例的具有多个风力涡轮机10的风电场或风场81。特别地,涡轮机10均具有如上所述的用于控制叶片噪声排放的控制器26。作为每个风力涡轮机10以个体涡轮机级解决服从噪声排放约束的优化问题的补充或替代,可以存在针对整个风电场81产生的噪声排放的约束。以风电场81级操作的控制器或优化器82可以用于开发将允许的噪声约束分配给风电场81中的每个风力涡轮机10的噪声排放模型。控制器82可以位于风电场82处或远离风电场82。
62.用于确定分配给个体涡轮机10的噪声约束的许多噪声参数可以与以上提到的在
个体涡轮机级而非风电场级处理的噪声参数相同。例如,风电场控制器82可以在风电场模型中考虑风电场81相对于栖息地位置(例如,包括房屋831)的地理位置,风电场控制器82确定从风电场82朝向栖息地83的允许噪声排放,然后针对每个涡轮机10分配噪声约束,使得总体允许风电场噪声排放不超过总体允许值。风电场控制器82可以分配噪声约束,使得风电场10中最靠近栖息地83的涡轮机10比最远离栖息地83的涡轮机10具有更低的允许叶片噪声产生水平。类似地,基于地形类型、风力涡轮机位置、大气条件和一天中的时间的总体噪声约束可以以风电场级考虑或建模,其中所确定的约束被分配给风电场81中的个体涡轮机10。
63.在不脱离如随附权利要求书中限定的本发明的范围的情况下,可以对上述实施方式做出许多修改形式。
64.在上述示例中,预测控制方法(具体地,模型预测控制方法)用于确定用于控制来自风力涡轮机的噪声排放的至少一个控制输出(例如,个体叶片桨距)。然而,在不同的示例中,用于确定控制输出的方法不需要是预测控制方法,可以替代地是基于常见模型的控制方法。这种方法的示例可以包括线性二次调节器(lqr)控制方法、线性二次高斯(lqg)控制方法和h∞控制方法。
65.在上述示例中,每个个体叶片被划分为多段,并且来自各段的噪声排放被预测并用在优化问题中以确定对个体叶片的叶片桨距控制。每个叶片可以被划分为任意数量的适当段,或者在一些示例中,叶片可以不被划分为段,并且替代地,整个叶片的噪声排放图可以被预测并用在优化问题中。
66.在本发明中,需要获悉噪声源的方向,即,叶片噪声排放的方向性。在上述示例中,叶片噪声排放的方向(和关联强度)是基于上述偶极子辐射图模型来建模的。然而,在不同的示例中,可以使用任何适于叶片噪声排放的方向和强度的模型。此外,另外地或另选地,可以例如使用靠近叶片的麦克风或其他合适传感器直接测量叶片噪声排放的方向和/或强度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1