一种增压直喷汽油机的电子节气门控制方法与流程
1.本发明属于汽车发动机控制技术领域,具体涉及一种增压直喷汽油机的电子节气门控制方法。
背景技术:
2.发动机进气系统零部件生产差异、且电子节气门受油品的影响以及缸内废气回流等因素,发动机工作一段时间,容易在电子节气门体内形成积碳,造成进入气缸的实际进气量与需求进气量出现偏差,那么系统会基于气量偏差的反馈来增大节气门开度以增大节气门有效面积,从而导致系统并未及时准确控制节气门开度,导致控制出现延迟,延时控制过程中会出现控制振荡转速和动力不稳的现象发生,引起客户抱怨。
3.现有的电子节气门控制方法可以是根据节气门目标开度和节气门实际开度进行闭环pid控制,从而实现实际节气门开度跟随目标节气门开度,而节气门目标开度是基于发动机动力请求的目标气量计算得到。但是在实际控制过程中i项会在每次车辆下电后清0,那么对于重新启动i项又会重新开始累积,且不同工况的过渡过程中的i项也是会进行逐步累加,会造成控制系统的响应延时,严重影响控制精度。
技术实现要素:
4.本发明要解决的技术问题是:针对上述现有技术存在的不足,提供一种增压直喷汽油机的电子节气门控制方法,对节气门闭环pid控制进行优化,能够识别出不同节气门和节气门不同生命周期下的控制特性,进而提高增压直喷汽油机电子节气门闭环动态控制精度。
5.本发明为解决上述技术问题所采取的技术方案为:
6.一种增压直喷汽油机的电子节气门控制方法,应用于汽车增压直喷汽油机进气系统,包括如下步骤:
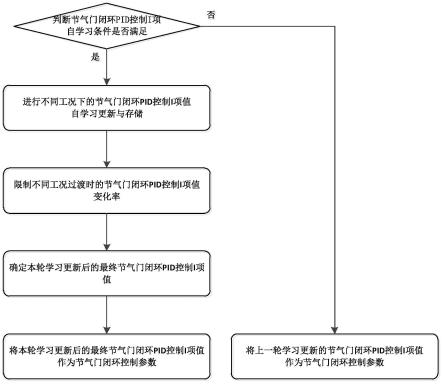
7.s1,判断节气门闭环pid控制i项自学习条件是否满足,若是,则继续执行后续步骤,若否,则将上一轮学习更新的节气门闭环pid控制i项值作为节气门闭环控制参数;
8.s2,进行不同工况下的节气门闭环pid控制i项值自学习更新与存储;
9.s3,限制不同工况过渡时的节气门闭环pid控制i项值变化率;
10.s4,确定本轮学习更新后的最终节气门闭环pid控制i项值;
11.s5,将所述本轮学习更新后的最终节气门闭环pid控制i项值作为节气门闭环控制参数。
12.进一步的,在步骤s1中,所述节气门闭环pid控制i项自学习条件,具体包括:
13.1)发动机转速在预设范围内,且进入节气门闭环pid控制i项自学习的发动机转速波动在预设波动范围内;
14.2)进气温度在预设范围内,且进入节气门闭环pid控制i项自学习的进气温度波动在预设波动范围内;
15.3)发动机水温在预设范围内;
16.4)长期燃油修正未更新超过预设时间;
17.5)未出现进气系统相关零部件故障;
18.6)节气门开度处于闭环控制;
19.7)目标进气量在预设范围内;
20.8)节气门气体流量和有效面积整体特征参数稳定;
21.9)目标进气密度与实际进气密度差在预设范围内;
22.10)目标节气门开度变化率在预设范围内;
23.11)当前工况未切换的时间超过预设值。
24.进一步的,所述目标进气量在预设范围内,具体为:
25.|rho
desraw
(n)-rho
desfilter
(n)|<min[rho
desraw
(n),rho
desfilter
(n)]
×rrholim
条件连续满足时间达到预设时间t
rho
,其中:
[0026]
rho
desfilter
(n)=k
rho
×
[rho
desraw
(n)-rho
desfilter
(n-1)]+rho
desfilter
(n-1)
[0027]
式中,rho
desraw
为目标进气量,rho
desraw
(n)为第n个采样周期的目标进气量,rho
desfilter
为一阶低通滤波后的目标进气量,rho
desfilter
(n)为第n个采样周期的滤波后的目标进气量,rho
desfilter
(n-1)为第n-1个采样周期的滤波后的目标进气量,n=1,2,3
…
,rho
desfilter
(0)等于第0个采样周期时的目标进气量rho
desraw
(0);采样周期间隔δt;
[0028]krho
为系数:其中m为发动机缸数,n为发动机转速,k
rho
为气量滤波系数,r
rholim
为修正系数。
[0029]
进一步的,所述节气门气体流量和有效面积整体特征参数稳定,具体为:
[0030]
|f
thr
(n)-f
thrfilter
(n)|<min[f
thrfilter
(n),f
thr
(n)]
×rthrlim
条件连续满足时间达到预设时间t
rho
,
[0031]
其中:
[0032][0033]fthrfilter
(n)=k
thr
×
[f
thr
(n)-f
thrfilter
(n-1)]+f
thrfilter
(n-1)
[0034]
式中,r为气体常数,t为节气门入口气体温度,p
pre
为节气门入口气体压力,p
man
为节气门出口气体压力,为节气门出口气体压力与入口气体压力之比的函数;
[0035]
rho
desraw
(n)为第n个采样周期的f
thr
,f
thrfilter
为一阶低通滤波后的f
thr
,f
thrfilter
(n)为第n个采样周期的滤波后的f
thr
,f
thrfilter
(n-1)为第n-1个采样周期的滤波后的整体特征参数,n=1,2,3
…
,f
thrfilter
(0)等于0;采样周期间隔δt;
[0036]kthr
为系数:其中m为发动机缸数,n为发动机转速,k
thr
为节气门滤波系数,r
thrlim
为修正系数。
[0037]
进一步的,在步骤s2中,所述不同工况,具体为:
[0038]
工况一:节气门未全开,且增压闭环控制未激活;
[0039]
工况二:节气门未全开,且增压闭环控制已激活;
[0040]
工况三:节气门全开,且增压闭环控制未激活;
[0041]
工况四:节气门全开,且增压闭环控制已激活。
[0042]
进一步的,在步骤s2中,所述节气门闭环pid控制i项值自学习更新与存储,具体为:
[0043]
将所述不同工况下的实时目标节气门开度和节气门出口目标压力与节气门入口实际压力之比下的pid控制中的i项分别存储起来,待后面达到同样工况的实时目标节气门开度和节气门出口目标压力与节气门入口实际压力之比时,将i项存储值与之前的i项存储值进行一阶低通滤波后,作为新的i项学习值补偿至闭环控制中,且所述学习值会在车辆下电后保存起来。
[0044]
进一步的,在步骤s2中,所述限制不同工况过渡时的节气门闭环pid控制i项值变化率,具体为:
[0045]
所述变化率的绝对值最大值不超过dpct
threrr
×
f(pct
threrr
,dpct
threrr
)
×
f(n,rho);
[0046]
式中,dpct
threrr
为目标节气门开度与实际节气门开度之差的变化率,pct
threrr
为目标节气门开度与实际节气门开度之差,f(pct
threrr
,dpct
threrr
)为dpct
threrr
和pct
threrr
的函数,n为发动机转速,rho为进入气缸新鲜空气进气密度,f(n,rho)为n和rho的函数。
[0047]
一种增压直喷汽油机进气系统,包括电子节气门,所述电子节气门采用如上所述的控制方法进行控制。
[0048]
一种汽车,包括如上所述的增压直喷汽油机进气系统。
[0049]
本发明与现有技术相比具有以下主要的优点:
[0050]
1、提供了一种增压直喷汽油机的电子节气门控制方法,应用于汽车增压直喷汽油机进气系统,通过对节气门闭环pid控制参数进行自学习更新,能够提高增压直喷汽油机电子节气门闭环动态控制精度;
[0051]
2、确定了节气门闭环pid控制i项自学习条件,以保证自学习更新的准确性,进而提高增压直喷汽油机电子节气门闭环动态控制精度;
[0052]
3、确定了节气门闭环pid控制i项参数自学习的四种工况,并进行不同工况下的自学习更新存储,以及限制不同工况下过渡时i项值变化率,得出最终i项学习值,能够进一步提升增压直喷汽油机电子节气门闭环动态控制精度,并保证控制系统的稳定性。
附图说明
[0053]
图1为本发明控制方法的流程图。
具体实施方式
[0054]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0055]
需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,
以实现本发明的目的。
[0056]
本发明提出了一种增压直喷汽油机的电子节气门控制方法,主要通过对节气门闭环pid控制i项值进行自学习更新并存储起来,待下次发动机运行到同等工况下时,直接运用上次学习到的i项值作为i项初始值,从而提高节气门闭环pid控制的控制精度。。
[0057]
如图1所示,本发明提出的一种增压直喷汽油机的电子节气门控制方法,具体包括如下步骤:
[0058]
s1,判断节气门闭环pid控制i项自学习条件是否满足,若是,则继续执行后续步骤,若否,则将上一轮学习更新的节气门闭环pid控制i项值作为节气门闭环控制参数。
[0059]
其中,为了保证自学习的准确性,节气门闭环pid控制i项自学习需要在发动机工况稳定的时候进行,因此,所述节气门闭环pid控制i项自学习条件具体为:
[0060]
1)发动机转速在预设范围内(本实例取750rpm-5000rpm),且进入节气门闭环pid控制i项自学习的发动机转速波动在预设波动范围内(本实例取
±
30rpm);
[0061]
2)进气温度在预设范围内(本实例取-50℃
‑‑
80℃),且进入节气门闭环pid控制i项自学习的进气温度波动在预设波动范围内(本实例取
±
2.5℃);
[0062]
3)发动机水温在预设范围内,保证发动机燃烧情况较好;(本实例取30℃-108℃);
[0063]
4)长期燃油修正未更新超过预设时间;(长期燃油修正更新可能是气量偏差导致,气量偏差可能是本身节气门出现故障,故障时学习值错误,因此需要在长期燃油修正学习未更新的情况下进行学习,本实例预设时间取10min);
[0064]
5)未出现进气系统相关零部件故障;
[0065]
6)节气门开度处于闭环控制;
[0066]
7)目标进气量在预设范围内,以表征目标节气门开度稳定的条件之一,具体如下:
[0067]
rho
desfilter
(n)=k
rho
×
[rho
desraw
(n)-rho
desfilter
(n-1)]+rho
desfilter
(n-1)
[0068]
其中,rho
desraw
为目标进气量,rho
desraw
(n)为第n个采样周期的目标进气量,rho
desfilter
为一阶低通滤波后的目标进气量,rho
desfilter
(n)为第n个采样周期的滤波后的目标进气量,rho
desfilter
(n-1)为第n-1个采样周期的滤波后的目标进气量,n=1,2,3
…
,rho
desfilter
(0)等于第0个采样周期时的目标进气量rho
desraw
(0);采样周期间隔δt本实例为10ms。k
rho
为系数:(本实例发动机缸数为4,k
rho
的标定时转速为1000rpm,如此设置的目的是为了归一化处理,在不同缸数和转速下,无需做特别标定,只需要标定4缸机和转速为1000rpm的k
rho
,从而减少标定测试工作),其中m为发动机缸数,n为发动机转速,k
rho
为气量滤波系数,本实例取0.02。
[0069]
在|rho
desraw
(n)-rho
desfilter
(n)|<min[rho
desraw
(n),rho
desfilter
(n)]
×rrholim
条件连续满足时间达到t
rho
后表示目标进气量处于稳定状态(气量波动较小)。其中,r
rholim
本实例取0.05,t
rho
本实例取0.4s。
[0070]
8)节气门气体流量和有效面积整体特征参数稳定,以表征目标节气门开度稳定的条件之一,具体如下:
[0071]
首先节气门节流阀体满足以下公式:
[0072]
[0073]
其中,节气门处气体流量,a
thr
为节气门有效面积,r为气体常数,t为节气门入口气体温度,p
pre
为节气门入口气体压力,p
man
为节气门出口气体压力,为节气门出口气体压力与入口气体压力之比的函数,本实例取值如下:
[0074][0075]
基于此,节气门气体流量和有效面积稳定采用稳定,即整体特征参数稳定。
[0076]
引入公式,f
thrfilter
(n)=k
thr
×
[f
thr
(n)-f
thrfilter
(n-1)]+f
thrfilter
(n-1)
[0077]
其中,rho
desraw
(n)为第n个采样周期的f
thr
,f
thrfilter
为一阶低通滤波后的f
thr
,f
thrfilter
(n)为第n个采样周期的滤波后的f
thr
,f
thrfilter
(n-1)为第n-1个采样周期的滤波后的整体特征参数,n=1,2,3
…
,f
thrfilter
(0)等于0;采样周期间隔δt本实例为10ms。k
thr
为系数:(本实例发动机缸数为4,k
thr
的标定时转速为1000rpm,如此设置的目的是为了归一化处理,在不同缸数和转速下,无需做特别标定,只需要标定4缸机和转速为1000rpm的k
thr
,从而减少标定测试工作),其中m为发动机缸数,n为发动机转速,k
thr
为节气门滤波系数,本实例取0.03。
[0078]
在|f
thr
(n)-f
thrfilter
(n)|<min[f
thrfilter
(n),f
thr
(n)]
×rthrlim
条件连续满足时间达到t
rho
后表示节气门处于稳定状态(节气门面积和气量波动较小)。其中,r
thrlim
本实例取0.05,t
thr
本实例取0.25s。
[0079]
9)目标进气密度与实际进气密度差在预设范围内(避免进气控制波动而影响学习值的准确性,本实例取
±
15mg/l);
[0080]
10)目标节气门开度变化率在预设范围内(避免节气门开度变化率波动而造成进气控制波动,从而影响学习值的准确性,本实例取
±
20%/s);
[0081]
11)当前工况未切换(工况未切换是指工况未从其中一种切换到另外一种)的时间超过预设值(避免切换工程中i项值不同影响相应工况的学习准确性,本实例所述预设值取1min)。
[0082]
在以上所有条件均满足后,则才允许进入节气门pid参数自学习。一旦其中任一条件不满足,则终止学习,本次学习值失效,电子节气门有效面积本次不更新。
[0083]
s2,进行不同工况下的节气门闭环pid控制i项值自学习更新与存储。
[0084]
其中,所述不同工况具体如下:
[0085]
工况一:节气门未全开(本次采样周期,节气门入口气体压力和出口气体压力之差超过预设值a,本实例取0.8kpa;或者,上一个采样周期(周期间隔为δt,本实例为10ms)节气门入口气体压力和出口气体压力之差不超过预设值a,但本次采样周期节气门入口气体
压力和出口气体压力之差超过预设值b,本实例取0.3kpa。都认为本次采样周期节气门未全开),且增压闭环控制未激活(增压闭环控制具体是指增压压力的闭环控制,增压闭环控制未激活是指增压压力未进行闭环控制);
[0086]
工况二:节气门未全开,且增压闭环控制已激活;
[0087]
工况三:节气门全开(本次采样周期,节气门入口气体压力和出口气体压力之差不超过预设值a;或者,上一个采样周期(周期间隔为δt,本实例为10ms)节气门入口气体压力和出口气体压力之差超过预设值b,但本次采样周期节气门入口气体压力和出口气体压力之差不超过预设值a。都认为本次采样周期节气门全开),且增压闭环控制未激活;
[0088]
工况四:节气门全开,且增压闭环控制已激活。
[0089]
如此设计这4种工况的原因是:节气门未全开时节气门的节流效果好,节气门处流量控制较为稳定,进气系统控制更为稳定;同样增压闭环处于激活时,节气门入口压力更大更有助于改善进气系统的控制稳定性,特别是进气压力要求较大的工况。因此不同工况下控制效果和控制进气压力范围不一样,从而闭环控制参数也有差异。
[0090]
进一步的,所述节气门闭环pid控制i项值自学习更新与存储,具体为:
[0091]
将以上4种工况下的实时目标节气门开度和节气门出口目标压力与节气门入口实际压力之比下(节气门状态(全开或非全开)、增压闭环控制状态(已激活或未激活)、目标节气门开度、节气门出口目标压力与节气门入口实际压力之比工况下)的pid控制(节气门目标开度和实际开度闭环pid)中的i项分别存储起来。待后面在同样工况(以上4种工况之一)的实时目标节气门开度和节气门出口目标压力与节气门入口实际压力之比时(所述同样工况,是指节气门状态(全开或非全开)、增压闭环控制状态(已激活或未激活)、目标节气门开度、节气门出口目标压力与节气门入口实际压力之比均相同),将i项存储值与之前的i项存储值进行一阶低通滤波后,作为新的i项学习值补偿至闭环控制中,学习值会在车辆下电后保存起来。
[0092]
s3,限制不同工况过渡时的节气门闭环pid控制i项值变化率。
[0093]
具体的,将两种工况之间i项值过渡的变化率被限制在预设范围内,以保证控制系统的稳定性。
[0094]
所述变化率最大最小值绝对值取决于目标节气门开度与实际节气门开度之差、目标节气门开度与实际节气门开度之差的变化率、发动机转速和进入气缸新鲜空气进气密度:
[0095]
i项学习值过渡工况下的最大变化率绝对值为:dpct
threrr
×
f(pct
threrr
,dpct
threrr
)
×
f(n,rho),即变化率绝对值被限制在其范围内,提供稳态误差和改善积分饱和。
[0096]
其中dpct
threrr
为目标节气门开度与实际节气门开度之差的变化率,pct
threrr
为目标节气门开度与实际节气门开度之差,f(pct
threrr
,dpct
threrr
)为dpct
threrr
和pct
threrr
的函数,取值如下表:
[0097][0098]
其中n为发动机转速,rho为进入气缸新鲜空气进气密度,f(n,rho)为n和rho的函数,取值如下表:
[0099][0100][0101]
最终的标定依据是确保节气门开度控制精度在任意工况下
±
0.8%以内。
[0102]
s4,确定本轮学习更新后的最终节气门闭环pid控制i项值。
[0103]
s5,将所述本轮学习更新后的最终节气门闭环pid控制i项值作为节气门闭环控制参数。
[0104]
综上所述,采用本发明的一种增压直喷汽油机的电子节气门控制方法,应用于汽车增压直喷汽油机进气系统,通过对节气门闭环pid控制进行优化,能够识别出不同节气门和节气门不同生命周期下的控制特性,进而提高增压直喷汽油机电子节气门闭环动态控制精度。
[0105]
基于上述方法,本发明还提供:
[0106]
一种增压直喷汽油机进气系统,设有电子节气门,所述电子节气门采用如上所述的控制方法进行控制。
[0107]
一种汽车,包括如上所述的增压直喷汽油机进气系统。
[0108]
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1