风力发电机组的塔架净空监测方法及装置与流程
本公开涉及风力发电。更具体地,本公开涉及一种风力发电机 组的塔架净空监测方法及装置。
背景技术:
1、随着风电技术的发展及能效要求的提高,面对“风火同价”的行业挑战, 叶片的轻量化设计是降低叶片成本的有效措施,更长、更柔、更轻是未来机 组叶片发展的趋势,但陆地风区风电装机超出原有风电机组标准设计的复杂 地形、复杂风况等条件的风电场建设比例日益增加,或因寒流、台风等气象 条件,风速风向变化剧烈,导致机组在短期内承受较大的风载,叶片形变加 大,导致机组瞬时出现净空不足,因此亟需低成本高可靠性的塔架净空监测 产品准确、有效地实现塔架净空的实时监测,对复杂地形、复杂风况下引起 的净空变化采取相应的控制和保护措施,保障机组安全运行。
2、现有净空测量技术,基于图像识别技术的视频净空在夜晚光线较差的情 况下,没有良好的环境适应性;基于激光等测距技术的净空系统在大雾等特 殊天气下应用边界受限;在塔架上布置红外、相机、雷达、电磁等测距或感 应传感器的方法,碍于机组偏航同步性布置难度大、维护成本高,集成复杂 不利于批量快速实施。
技术实现思路
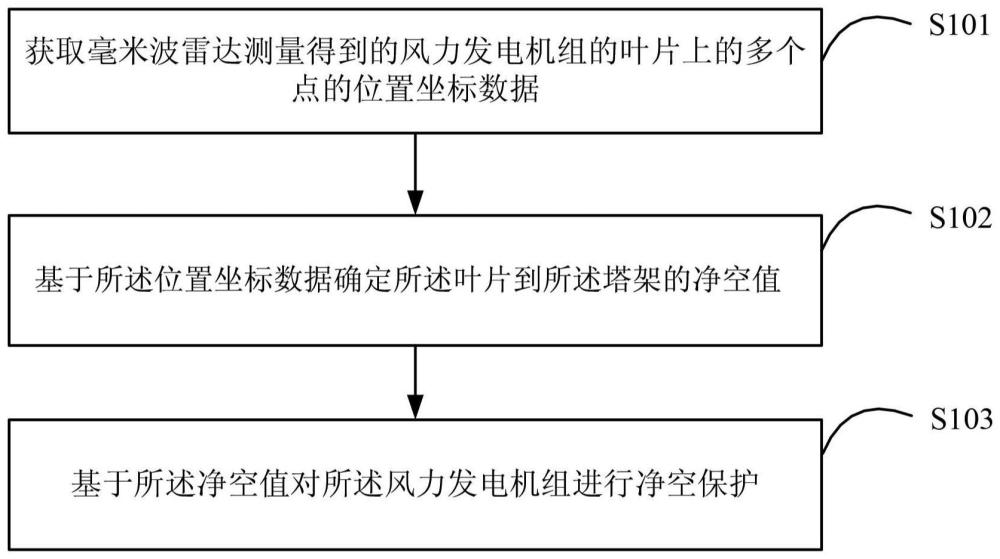
1、根据本公开的示例性实施例,提供一种风力发电机组的塔架净空监测方 法,包括:获取毫米波雷达测量得到的风力发电机组的叶片上的多个点的位 置坐标数据,其中,所述毫米波雷达偏心地安装在所述风力发电机组的机舱 底部;基于所述位置坐标数据确定所述叶片到所述塔架的净空值;基于所述 净空值对所述风力发电机组进行净空保护。
2、可选地,所述多个点可包括所述叶片的预设范围内每隔预设间隔的点, 所述预设范围可包括在所述叶片上从距离叶尖的预设距离处至所述叶尖之间 的范围。
3、可选地,所述基于所述位置坐标数据确定所述叶片到所述风力发电机组 的塔架的净空值的步骤可包括:从所述位置坐标数据中获取所述多个点中的 每个点到所述塔架的未修正净空值,其中,所述未修正净空值是指所述毫米 波雷达的安装位置与每个点在叶尖平面上的投影的距离差;针对所述多个点 中的每个点,将所述未修正净空值与第一距离相减,并且与第二距离相加, 得到每个点的测量净空值;将所述测量净空值中数值最小的测量净空值确定 为所述叶片到所述塔架的净空值,其中,第一距离是所述毫米波雷达的安装 位置在所述叶尖平面上与所述塔架圆心之间的距离,第二距离是所述塔架在 每个点所在的垂直于所述塔架的平面的横截面上的半径。
4、可选地,所述塔架净空监测方法还可包括:确定以所述风力发电机组的 塔架顶部截面圆心为坐标原点、面向叶轮左侧为x轴正向、叶轮方向为y轴 正向、重力方向为z轴正向的三维直角坐标系,将所述毫米波雷达的安装位 置在所述三维直角坐标系中的y坐标确定为第一距离;通过公式和计算第二距离,其中,yb表示第 二距离,表示所述叶尖平面处塔架横截面直径,表示塔架顶部横截面 直径,表示塔架底部横截面直径,lblade表示叶片长度,htower表示塔 架高度。
5、可选地,所述位置坐标数据是所述叶片上的点在直角坐标系中的坐标数 据,所述直角坐标系以毫米波雷达安装位置为坐标原点,并且以重力方向为 一个坐标轴方向,其中,所述从所述位置坐标数据中获取所述多个点中的每 个点到所述塔架的未修正净空值的步骤包括:针对所述多个点中的每个点, 将所述位置坐标数据中的指定维度数据作为每个点到所述塔架的未修正净空 值。
6、可选地,当所述直角坐标系为二维直角坐标系时,所述直角坐标系以叶 轮方向为x轴正向,重力方向为y轴正向,其中,所述从所述位置坐标数据 中获取所述多个点中的每个点到所述塔架的未修正净空值的步骤可包括:针 对所述多个点中的每个点,将所述位置坐标数据中的x坐标作为每个点到所 述塔架的未修正净空值。
7、可选地,所述基于所述净空值对所述风力发电机组进行净空保护的步骤 可包括:基于所述净空值确定叠加桨角值;基于所述风力发电机组的当前桨 角值和所述叠加桨角值确定对净空保护的最小桨角限幅。
8、可选地,所述获取毫米波雷达测量得到的风力发电机组的叶片上的多个 点的位置坐标数据的步骤可包括:确定所述风力发电机组是否处于毫米波净 空失效状态;当确定所述风力发电机组不处于所述毫米波净空失效状态时, 获取所述多个点的位置坐标数据,其中,所述毫米波净空失效状态包括以下 至少一个:毫米波净空系统与机组通讯异常、毫米波雷达心跳信号丢失、毫 米波雷达的设备状态标志位异常。
9、根据本公开的示例性实施例,提供一种风力发电机组的塔架净空监测装 置,包括:数据获取单元,被配置为获取毫米波雷达测量得到的风力发电机 组的叶片上的多个点的位置坐标数据,其中,所述毫米波雷达偏心地安装在 所述风力发电机组的机舱底部;净空确定单元,被配置为基于所述位置坐标 数据确定所述叶片到所述塔架的净空值;和净空保护单元,被配置为基于所 述净空值对所述风力发电机组进行净空保护。
10、可选地,所述多个点可包括所述叶片的预设范围内每隔预设间隔的点, 所述预设范围可包括在所述叶片上从距离叶尖的预设距离处至所述叶尖之间 的范围。
11、可选地,所述净空确定单元可被配置为:从所述位置坐标数据中获取所 述多个点中的每个点到所述塔架的未修正净空值,其中,所述未修正净空值 是指所述毫米波雷达的安装位置与每个点在叶尖平面上的投影的距离差;针 对所述多个点中的每个点,将所述未修正净空值与第一距离相减,并且与第 二距离相加,得到每个点的测量净空值;将所述测量净空值中数值最小的测 量净空值确定为所述叶片到所述塔架的净空值,其中,第一距离是所述毫米 波雷达的安装位置在所述叶尖平面上与所述塔架圆心之间的距离,第二距离是所述塔架在每个点所在的垂直于所述塔架的平面的横截面上的半径。
12、可选地,所述塔架净空监测装置还可包括距离确定单元,被配置为:确 定以所述风力发电机组的塔架顶部截面圆心为坐标原点、面向叶轮左侧为x 轴正向、叶轮方向为y轴正向、重力方向为z轴正向的三维直角坐标系,将 所述毫米波雷达的安装位置在所述三维直角坐标系中的y坐标确定为第一距 离;通过公式和确定第二距离, 其中,yb表示第二距离,表示所述叶尖平面处塔架横截面直径,表示 塔架顶部横截面直径,表示塔架底部横截面直径,lblade表示叶片长 度,htower表示塔架高度。
13、可选地,所述位置坐标数据可以是所述叶片上的点在直角坐标系中的坐 标数据,所述直角坐标系可以以毫米波雷达安装位置为坐标原点,并且以重 力方向为一个坐标轴方向,其中,所述净空确定单元可被配置为:针对所述 多个点中的每个点,将所述位置坐标数据中的指定维度数据作为每个点到所 述塔架的未修正净空值。
14、可选地,当所述直角坐标系为二维直角坐标系时,所述直角坐标系可以 以叶轮方向为x轴正向,重力方向为y轴正向,其中,所述净空确定单元可 被配置为:针对所述多个点中的每个点,将所述位置坐标数据中的x坐标作 为每个点到所述塔架的未修正净空值。
15、可选地,所述净空保护单元可被配置为:基于所述净空值确定叠加桨角 值;基于所述风力发电机组的当前桨角值和所述叠加桨角值确定对净空保护 的最小桨角限幅。
16、可选地,所述数据获取单元可被配置为:确定所述风力发电机组是否处 于毫米波净空失效状态;当确定所述风力发电机组不处于所述毫米波净空失 效状态时,获取所述多个点的位置坐标数据,其中,所述毫米波净空失效状 态包括以下至少一个:毫米波净空系统与机组通讯异常、毫米波雷达心跳信 号丢失、毫米波雷达的设备状态标志位异常。
17、根据本公开的示例性实施例,提供一种风力发电机组的塔架净空监测系 统,包括:毫米波雷达,偏心地安装在所述风力发电机组的机舱底部,用于 测量风力发电机组的叶片上的多个点的位置坐标数据;电子装置,包括本公 开中的塔架净空监测装置。
18、根据本公开的示例性实施例,提供一种计算机可读存储介质,其上存储 有计算机程序,当所述计算机程序被处理器执行时,实现根据本公开的示例 性实施例的风力发电机组的塔架净空监测方法。
19、根据本公开的示例性实施例,提供一种电子设备,包括:至少一个处理 器;至少一个存储器,存储有计算机程序,当所述计算机程序被所述至少一 个处理器执行时,实现根据本公开的示例性实施例的风力发电机组的塔架净 空监测方法。
20、根据本公开的示例性实施例,提供一种计算机程序产品,该计算机程序 产品中的指令可由计算机设备的处理器执行以完成根据本公开的示例性实施 例的风力发电机组的塔架净空监测方法。
21、根据本公开的示例性实施例的风力发电机组的塔架净空监测方法及装置, 通过首先获取毫米波雷达测量得到的风力发电机组的叶片上的多个点的位置 坐标数据,其中,所述毫米波雷达偏心地安装在所述风力发电机组的机舱底 部,然后基于所述位置坐标数据确定所述叶片到所述塔架的净空值,并且基 于所述净空值对所述风力发电机组进行净空保护,从而提高对风力发电机组 的塔架净空保护效果。
22、将在接下来的描述中部分阐述本公开总体构思另外的方面和/或优点,还 有一部分通过描述将是清楚的,或者可以经过本公开总体构思的实施而得知。
- 还没有人留言评论。精彩留言会获得点赞!