一种基于尾流跟踪的海上风电场场级协同控制策略
1.本发明属于海上风电场协同控制技术领域,尤其是涉及一种基于尾流跟踪的海上风电场场级协同控制策略。
背景技术:
2.随着经济社会的快速发展,电力需求大幅增长,需要大力发展可再生能源。海上风能作为可再生能源的重要一环,储量丰富,而且近海风电与用电密集的沿海城市距离较近,便于电能传输与消纳,可以有效节约陆地资源,降低视觉和噪音污染。因此,海上风力发电被认为是解决能源需求和环境问题的有效方式之一。
3.然而,现有的海上风电场往往由于海域限制排布紧密,从而形成尾流效应带来功率损耗和疲劳载荷。研究表明,尾流效应能够对下游风力机造成40%的功率亏损以及80%的疲劳载荷增长,最终降低风电场产能和疲劳寿命,影响整个风电场的经济效益和安全运行。
4.为了改善尾流效应,现有研究提出海上风电场场级协同控制策略,利用先进传感和控制方法,实现风力机的协同运行控制,降低尾流影响,实现风电场场级的功率提升和降载,具体控制方法包括尾流重定向控制和轴向诱导因子控制。
5.公开号为cn111980857a的中国专利文献公开了一种风电场的闭环控制方法,包括:通过风电场的工程尾流模型来计算得到风电场内每台风机不同来流下的初步最优偏航角;测量风电场的现场尾流流动数据;以及基于风电场的现场尾流流动数据作为反馈来修正每台风机不同来流下的初步最优偏航角。
6.公开号为cn108953060a的中国专利文献公开了一种基于激光雷达测风仪的风电场场级偏航控制方法,包括:通过设于风电场内预定位置和预定数量的激光雷达测量相应位置的风速风向数据;处理所述风速数据以得到风电场局部单机尾流模型;通过所述局部尾流模型,得出整个风电场的尾流模型;根据整个风电场的尾流模型,计算风电机组的当前偏航角度修正因子;通过前排激光雷达测量提前风向信息,作为第一排风电机组偏航的补偿信号;基于风速风向标的风向信号和所述当前偏航修正信号及所述补偿信号进行风电机组偏航控制。
7.然而,大气风场具有复杂性,尾流场结构多变,利用现有的技术方法难以实现海上风电场内精准的尾流评估,目前,现有海上风电场协同控制技术并没有形成成熟的尾流智能化控制能力。
技术实现要素:
8.本发明提供了一种基于尾流跟踪的海上风电场场级协同控制策略,通过激光雷达测风技术实现尾流实时跟踪,并利用场级协同控制技术实现尾流重定向和智能化控制,从而提高海上风电场系统的发电量,实现海上风电场的增效降载。
9.一种基于尾流跟踪的海上风电场场级协同控制策略,包括:
10.(1)利用机舱式激光雷达测风系统测量得到每台海上风力机前侧流场风速分布数据;
11.(2)建立尾流跟踪模块,利用步骤(1)得到的风速分布数据通过三维风场反演完成来流风在无尾流影响下的风信息评估和尾流影响下的尾流特征参数辨识,尾流特征参数包括尾流深度、尾流宽度和尾流中心位置;
12.(3)根据实际海上风电场的排布特征和流场分布情况,建立海上风电场气动-液压-伺服-弹性动力学仿真模型;利用激光雷达测风系统所测的历史风速分布数据对仿真模型的参数进行校正,并将该仿真模型用于预测风电场在输入风况和控制策略下的运行状况;
13.(4)建立海上风电场基于尾流重定向的多维智能决策数据库,用于实现在不同环境风况下的最优控制策略在线实时搜索;
14.建立综合考虑风电场功率最大化和载荷最小化的多目标优化函数,通过智能优化算法得到风电场在不同环境风况输入下的最优尾流中心位置信息,并将上述参数信息记录到多维智能决策数据库;
15.(5)建立海上风电场场级协同pi控制器,利用查表法在线搜索多维智能决策数据库获得风电场在相应风况输入下的最优尾流中心位置信息,将其作为场级协同pi控制器的参考值,根据尾流跟踪模块测得的尾流信息测量值,通过场级协同pi控制器改变各机组与环境来流风的偏航不对中程度,实现尾流重定向和控制优化。
16.进一步地,尾流跟踪模块旨在利用海上风电场机舱式激光雷达测量获得前侧流场风速分布情况,通过风向对北校正、水平风速换算、三维风场反演及尾流参数辨识等数据处理完成来流风在无尾流影响下的风信息评估和尾流影响下的尾流特征参数辨识,获得尾流参数信息。
17.步骤(2)的具体过程为:
18.(2-1)三维风场反演
19.海上风电场机舱式激光雷达测风系统可精确地远程测量其安装位置前方的风况,获得风力机的风廓线和复杂的尾流状态,主要用于风电场性能优化和整体控制。在本发明所述的风电场场级协同控制过程中,海上风力机的机舱往往还面临着空间姿态位置随时间不断变化等问题,这给激光雷达在风向测量上带来难度,因此需要在三维风场反演时设计相应的风速算法来消除误差。
20.为了准确评估海上风电场内部风速分布信息,首先进行风向对北校正,通过坐标旋转转换矩阵算法来反演激光束在地球坐标系下的指向;激光束指向的坐标变换公式为:
21.l
los
=(h1h2h3)-1
l
los_lidar
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
22.其中,l
los
为激光束在地球坐标下的指向,h1、h2、h3为坐标旋转转换矩阵,l
los_lidar
为激光束在机舱坐标下的指向;
23.定义机舱坐标系的方向:x0为转子轴向指向机舱头部方向,y0为转子径向指向水平左侧,z0与风力机塔筒轴同轴并指向机舱顶部方向;激光束指向通过方位角和俯仰角θ0描述,其中方位角为激光束在x0y0面的投影与x0的夹角,俯仰角θ0为激光束与x0y0面的夹角;风力机机舱在协同控制过程中形成姿态的变化,用翻滚角俯仰角θ和偏航角ψ表示;因此,激光束在机舱坐标下的指向l
los_lidar
及坐标旋转转换矩阵表示为如下:
[0024][0025][0026][0027][0028]
(1)式可由(2)、(3)、(4)、(5)式带入直接得到激光束实际指向,进一步求解得到激光束视线风速v
los
:
[0029]vlos
=v
wind
·
l
los
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0030]
在实际海上机舱式激光雷达扫描测量时,可获得任意高度上多个方位的视线风速信息。在相同高度和圆周扫描层,视线风速在理想情况下为三角函数,定义为:
[0031]
f(v
los
)=a cos(θ-b)+c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0032]
参数a、b和c由所测量高度上的风矢量信息决定,具体地:
[0033][0034]
其中,v1、v2和v3为测量风电场在地球坐标系下的南北方向、东西方向和垂直方向上的分速度,其决定了上述视线风速函数的参数大小;
[0035]
通过最小二乘法拟合(7)式和(8)式所述的视线风速,通过最小化函数误差(9)式,求解得到曲线函数的参数a、b和c,完成三维风电场风速分布的反演;
[0036][0037]
其中,n为机舱式激光雷达在某个测量周期内的测试点个数;基于上述风场反演,获得风电场来流风在无尾流影响下的风信息,包括风速、风向和湍流强度,同时为尾流特征参数辨识提供数据基础;
[0038]
(2-2)尾流特征参数辨识
[0039]
基于海上风电场机舱式激光雷达测得原始数据,通过风向对北校正、水平风速换
算完成三维风场反演,获得风力机前侧风速分布情况。利用风力机轮毂高度处的风速数据,完成基于反高斯分布的尾流参数辨识,获取尾流的特征参数。具体地,建立风力机前侧所受尾流速度分布的反高斯函数,公式如下:
[0040][0041]
其中,u为风力机轮毂高度的(x,zh)位置处在时间t时刻的风速,u0为时间t时刻的环境平均风速,cs为尾流比例系数,用以量化尾流深度,e为自然常数,μ为轮毂高度处尾流中心位置,σ为尾流标准差,用以量化尾流宽度,π为圆周率;基于海上风电场的排布情况,本发明假设尾流中心位置约位于下游风力机轮毂高度处。
[0042]
利用激光雷达测得的风力机前侧相应距离处的风速数据,利用最小二乘法完成反高斯函数的参数拟合,获得尾流特征参数,具体包括尾流深度、尾流宽度和尾流中心位置信息。
[0043]
步骤(3)中,海上风电场气动-液压-伺服-弹性动力学仿真模型可用于预测海上风电场在不同环境工况和控制输入下的动态运行特征,具体包括流场分布和机组功率、载荷等动态响应等。
[0044]
海上风电场气动-液压-伺服-弹性动力学仿真模型具体包括风电场气动仿真模型、海上风力机模型和尾流模型等。
[0045]
所述的风电场气动仿真模型利用taylor湍流冻结假设完成风电场三维流场在空间上的动态传播模拟;所述的海上风力机模型采用制动盘模型,根据实际机组的性能参数完成建模并获得在特定环境工况下机组功率、载荷动态响应;所述的尾流模型用于预测与风电场输出功率和机组负载相关的关键尾流特征,包括尾流风速赤字、尾流膨胀以及尾流蜿蜒等。
[0046]
步骤(4)中,海上风电场基于尾流重定向的多维智能决策数据库lut旨在记录海上风电场在不同环境工况下各机组前侧的最佳尾流中心位置信息。本发明所述尾流重定向是通过风电场主动偏航协同控制进行实现,通过上游风力机的不对风实现下游尾流轨迹的变化,从而改善下游风力机由于尾流效应带来的功率损耗和载荷增长。为了在实际海上风电场动态变化的环境工况下实现多目标优化,本发明建立的多维智能决策数据库lut可用于实现最优尾流中心位置的在线实时搜索,从而利用协同偏航控制实现尾流重定向。
[0047]
具体地,为了建立所述海上风电场基于尾流重定向的多维智能决策数据库lut,利用步骤(3)所述海上风电场气动-液压-伺服-弹性动力学仿真模型获得海上风电场在不同环境工况和控制输入下的流场分布和机组功率、载荷等动态响应等。根据海上风电场系统在单位时间内功率和载荷的时域变化,分别计算总输出功率和机组关键部位疲劳载荷。
[0048]
建立综合考虑风电场功率最大化和载荷最小化的多目标优化函数具体过程为:
[0049]
(4-1)计算海上风力发电机组i的输出功率:
[0050][0051]
式中,pi为风电场内机组i发电机的输出功率(w),t
q,i
(t)为机组i发电机在t时刻的瞬时扭矩(n-m),ωi为机组i发电机在t时刻的瞬时转速(rpm),tk为当前时刻,δt为当前
求解的时域周期。在本发明专利中可通过主动偏航控制改变环境风入流角,实现风电场运行性能的优化。
[0052]
根据上述单台机组的功率计算公式,求解风电场系统的总发电功率即为风电场系统内所有风力发电机组的发电功率之和为:
[0053][0054]
(4-2)计算风力发电机组i所受等效疲劳载荷:
[0055]
利用风电场气动-液压-伺服-弹性动力学仿真模型获得风电场内风力发电机组i关键部位所受载荷时域变化情况,包括塔筒底部和叶片根部的载荷变化情况;通过雨流计数法,对风力发电机组i所受时域变化的载荷进行等效分析,获得关键部位等效疲劳载荷del:
[0056][0057]
式中,del为等效疲劳载荷,为时间序列j内的等效循环次数,n
j,i
为第i个工况在时间序列j内发生的次数,l
j,i
为第i个工况在时间序列j内的载荷范围,m为材料s-n曲线的斜率;
[0058]
(4-3)为实现风电场总输出功率最大化,并降低机组关键部位所受疲劳载荷,建立多目标优化函数如下:
[0059][0060]
式中,为归一化后的风电场系统总发电功率,del
norm
为归一化后的各台风力发电机组关键部位所受最大疲劳载荷,α为权重系数。
[0061]
建立多目标优化函数后,通过智能优化算法求解在特定环境工况下最大化目标函数j的最优偏航控制角,并通过风电场气动-液压-伺服-弹性动力学仿真模型记录各机组在该偏航控制输入下转子前侧的最优尾流中心位置;最后,将上述环境风况参数和对应的最优尾流中心位置信息保存为多维智能决策数据库,用以不同环境风况下各机组前侧最优尾流中心位置的在线实时搜索和场级协同控制。
[0062]
具体地,步骤(4-3)中,所述的智能优化算法包括但不限于遗传算法、粒子群算法和博弈论算法。
[0063]
步骤(5)中,所述的海上风电场场级协同pi控制器包含低通滤波器、多维智能决策数据库、尾流中心位置误差计算模块、pi控制器、偏航执行器和激光雷达测风系统。
[0064]
将激光雷达测风系统获得的环境风况测量值作为输入,通过低通滤波器获得外界环境风输入的平均风速与风向,在低通滤波器后接多维智能决策数据库;利用查表法实现在线搜索,获得对应环境风况下的各机组前侧最优尾流中心位置信息;利用尾流中心位置误差计算模块完成各机组前侧实际尾流中心位置与期望尾流中心位置的误差估计;将尾流中心位置误差计算模块获得的中心位置偏差值输入pi控制器,对偏差值进行比例、积分运算,得到风电场在单位控制周期内进行主动协同偏航控制的调整值;通过偏航执行器改变各机组与环境来流风的偏航不对中程度,实现尾流重定向和控制优化。
[0065]
利用尾流中心位置误差计算模块完成各机组前侧实际尾流中心位置与期望尾流中心位置的误差估计具体包括:
[0066]
通过激光雷达测风系统的三维风场反演获得实测尾流中心位置信息参数,通过在线搜索多维智能决策数据库获取最优尾流中心位置信息参数,通过尾流中心位置误差计算模块对两者做差获得中心位置的偏差值。
[0067]
与现有技术相比,本发明具有以下有益效果:
[0068]
1、本发明专利建立尾流跟踪模块,可根据激光雷达测风系统所测实时原始数据完成三维风场反演,获得环境风况参数和各风力机组前侧尾流特征参数,从而完成实时尾流跟踪,可为后续的尾流智能化控制提供可靠的实测输入。
[0069]
2、本发明专利采用多目标优化方法,综合考虑海上风电场系统总输出功率和机组关键部位所受疲劳载荷情况建立多目标优化函数,基于海上风电场气动-液压-伺服-弹性动力学仿真模型完成流场分布预测,并利用智能优化算法完成在不同环境风况下对最优尾流中心位置的求解,建立多维智能决策数据库lut。该智能数据库可用于海上风电场的在线搜索和快速优化,实现风电场系统在变化环境风况下的尾流智能化控制。
[0070]
3、本发明专利建立场级协同pi控制器,以激光雷达测风系统获得的实测尾流中心位置信息作为输入,以多维智能决策数据库lut搜索获得的最优尾流中心位置信息作为目标值,求解得到单位控制周期内的协同偏航控制调整值,下发给各台机组实现场级协同控制和尾流重定向。本发明所述控制器具有控制效果好、执行速度快等特点。
附图说明
[0071]
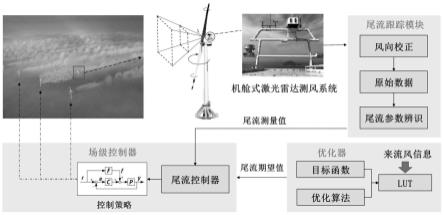
图1为本发明一种基于尾流跟踪的海上风电场场级协同控制策略的系统结构图;
[0072]
图2为海上风电场场级协同pi控制器的结构图;
[0073]
图3为pi控制器的结构图;
[0074]
图4为多维智能决策数据库的建立流程图;
[0075]
图5为本发明实施例中激光雷达测风系统的实测风况信息;
[0076]
图6是本发明实施例中海上风电场气动-液压-伺服-弹性动力学仿真模型的wt2、wt3、wt5和wt6机组在优化控制前后其机组前侧所受尾流的中心位置变化情况;
[0077]
图7是本发明实施例中海上风电场系统在优化控制前后运行性能时域变化情况。
具体实施方式
[0078]
下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
[0079]
如图1所示,基于尾流跟踪的海上风电场场级协同控制策略的控制系统,包括机舱式的激光雷达测风系统、尾流跟踪模块、优化器以及场级控制器。利用激光雷达测风系统完成对环境风况和尾流特征参数的辨识,通过优化器中建立的多维智能决策数据库获得最优尾流中心位置信息参考值,利用pi协同控制器通过主动偏航完成尾流重定向与智能化控制。
[0080]
具体步骤如下:
[0081]
步骤1,建立尾流跟踪模块,利用海上风电场机舱式激光雷达测风系统测量获得各
台海上风力机前侧流场风速分布情况,根据测量的风速分布数据通过三维风场反演完成来流风在无尾流影响下的风信息评估和尾流影响下的尾流特征辨识,获得尾流参数信息和尾流中心位置,完成尾流实时跟踪。
[0082]
步骤2,根据实际海上风电场的排布特征和流场分布情况,建立海上风电场气动-液压-伺服-弹性动力学仿真模型,具体包括风电场气动仿真模型、海上风力机模型和尾流模型等,并利用上述激光雷达所测历史风速信息对模型参数进行校正,并将该模型用于预测风电场在特定环境输入风况和控制策略下的运行状况。
[0083]
步骤3,海上风电场基于尾流重定向的多维智能决策数据库lut用于实现在不同环境风况下的最优控制策略在线实时搜索。建立综合考虑风电场功率最大化和载荷最小化的多目标优化函数,通过智能优化算法得到风电场在不同环境风况输入下的最优尾流中心位置信息,并将上述参数信息记录为多维智能决策数据库。
[0084]
步骤4,海上风电场场级协同控制器,利用查表法在线搜索多维智能决策数据库lut获得风电场在相应风况输入下的最优尾流中心位置信息,将其作为场级控制器的参考值,根据尾流跟踪模块测得的尾流信息测量值,通过场级协同pi控制器改变各机组与环境来流风的偏航不对中程度,实现尾流重定向和控制优化。
[0085]
如图2所示,海上风电场场级协同pi控制器具体包括低通滤波器、多维智能决策数据库lut、尾流中心位置误差计算模块、pi控制器、偏航执行器和基于测风激光雷达系统的尾流跟踪模块等。在单位控制周期内,通过激光雷达测风系统测量风况数据完成三维风场反演,获得环境输入风的平均风速和风向信息,经过低通滤波后输入多维智能决策数据库lut在线搜索获得相应工况下的最优尾流中心位置信息,利用pi控制器通过偏航执行器完成尾流重定向,使得实测尾流中心位置与最优尾流中心位置信息一致,完成尾流智能化控制。
[0086]
如图3所示,pi控制器利用上述激光雷达测风系统和多维智能决策数据库lut求解得到实测尾流中心位置和最优尾流中心位置的偏差值,通过比例、积分运算得到场级协同偏航控制的调整量,完成尾流重定向。
[0087]
如图4所示,基于海上风电场气动-液压-伺服-弹性动力学仿真模型预测实际海上风电场在相应环境工况下的动态运行特征,获得不同环境工况参数、机组控制参数与风电场输出功率和机组负载之间的映射关系模型。建立综合考虑降低功率损耗和疲劳载荷的多目标优化函数,利用智能优化算法完成对最优偏航控制策略的寻优,记录相应控制下的最优尾流中心位置信息,建立并保存为多维智能决策数据库lut。
[0088]
在具体的实施例中,上述海上风力机模型包括机械模型和控制模型等,可通过修改模型参数来模拟不同型号的海上风电机组。本实施例选择nrel 5mw风电机组进行仿真模拟。
[0089]
上述流场模型和尾流模型根据海上风电场环境输入风况信息和尾流传播特征完成各机组所受风况的预测,其具体的模型参数由测风激光雷达系统获得的实测数据完成参数校正。本实施例选择实际机舱式激光雷达所测风况信息,该实测原始数据为2019年5月19日所测某风电场内一机组搭载的机舱式激光雷达测风系统在350分钟内的风况数据。基于实测数据,完成三维风场反演,获得不同激光束所测视线风速,并对机组前侧风速时序列进行求解,获得风电场环境风输入的平均风速和风向信息,风信息时序列如图5所示。由上述
数据处理后可得,该测量时间内风电场的输入环境风平均风速为8.3892m/s,平均风向为268.6361
°
(选择正北方向为0
°
)。
[0090]
在具体的实施例中,上述海上风电场仿真环境的建立是基于实际海上风电场的特征,具体包括风电机组的排布和环境风资源分布情况等,使得仿真结果与实际工况接近。基于上述输入风况信息,将测风激光雷达所测风信息作为风电场仿真模型的输入工况。建立2
×
3海上风电场气动-液压-伺服-弹性动力学仿真模型,各机组模型选择nrel 5mw风电机组,机组的转子直径为126m。通过仿真预测该风电场在800s内的运行特性,具体计算其输出功率时序变化和关键部位疲劳载荷时序变化。其中,在各机组轮毂高度处建立x-y平面坐标系,则海上风电场系统内各机组排布位置信息如下表1所示,其中270
°
输入风向为ox轴方向(东西方向),y轴方向为南北方向。
[0091]
表1海上风电场仿真模型各机组排布位置
[0092]
机组序号坐标信息(m)wt1(0,-189)wt2(630,-189)wt3(1260,-189)wt4(0,189)wt5(630,189)wt6(1260,189)
[0093]
根据获得运行特性的时域变化规律,求解单位控制周期的800s内风电场系统的总输出功率和关键部位疲劳载荷情况。建立综合考虑增效减载的多目标优化函数,如下:
[0094][0095]
式中,为归一化后的风电场系统总发电功率,del
norm
为归一化后的各台风力发电机组关键部位所受最大疲劳载荷,α为权重系数。本实施例选择优化权重系数α为0.6。利用智能优化算法完成对最优偏航控制角的寻优,使得最大化该目标函数的结果。具体地,本实施例选择遗传算法完成最优解的寻优。观察海上风电场系统在相应的环境输入风况和主动偏航协同控制下,各机组前侧所受上游尾流影响情况,记录各机组所受尾流中心位置信息,将其保存为多维智能决策数据库lut以实现在线实时搜索与优化。
[0096]
具体地,本实施例在激光雷达测风系统所测风况下进行仿真模拟和多目标优化控制,在线搜索多维智能决策数据库lut对应工况下的最优尾流中心位置信息,通过场级pi协同控制器完成尾流重定向和智能化控制。在闭环控制下,将在线搜索得到的最优尾流中心位置作为系统的参考值,三维风场反演得到的实测尾流中心位置作为观测值,风电场系统内各机组通过主动协同偏航控制实时跟踪最优尾流中心位置信息,实现尾流的智能化控制。
[0097]
如图6所示,海上风电场气动-液压-伺服-弹性动力学仿真模型的wt2、wt3、wt5和wt6机组在优化控制前后其机组前侧所受尾流的中心位置变化情况,其纵坐标为各机组前侧所受尾流的中心位置在xy坐标系中y轴的坐标值变化。各机组前侧的尾流中心位置在上游风力机转子下游处呈现动态蜿蜒变化状态,且机组下游距离越远,尾流蜿蜒现象越显著。
[0098]
图7为海上风电场系统在优化控制前后运行性能时域变化情况,具体包括总输出
功率、塔筒俯仰弯矩时域变化、叶片俯仰弯矩时域变化情况等。由于尾流延迟传播作用,海上风电场系统约在450s后达到稳定状态,因此本实施例主要关注450s-800s时间内的结果。通过计算可得,优化控制后风电场系统的总输出功率可提升10.33%,塔筒疲劳载荷可降低9.74%,而叶片疲劳载荷略有上升,总体而言,本发明所述优化控制策略可显著实现增效降载的多目标优化。
[0099]
以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1