带不可用叶片负载传感器的单独桨距控制的制作方法
本发明涉及在一个叶片负载传感器不可用的情况下的变桨致动。
背景技术:
1、众所周知,风力涡轮机包括支撑机舱的塔架和带有多个桨距可调节转子叶片的转子。
2、对于大型风力涡轮机来说,控制桨距通常有利于降低负载的目的,例如减轻转子上的不对称负载以及叶片在挥舞(拍打)方向或边缘方向上承受的过大负载。特别是,叶片在边缘方向上承受的激励通常是不被期望的,因为叶片在该方向上的阻尼通常很弱。
3、众所周知的是基于叶片负载传感器(诸如安装在叶片的根部区段的叶片负载传感器)信号进行单独桨距控制。单独桨距控制通常依赖于所有三个叶片传感器的测量值都可用。如果一个传感器离线并且变得不可用,风力涡轮机可能会在安全模式下降额,以确保在设计负载包络内运行。这会导致涡轮机运行效率降低,从而对能量捕获产生负面影响。
技术实现思路
1、基于叶片负载传感器信号获得叶片桨距控制的改进方式是有利的。特别是,在叶片负载传感器变得不可用的情况下,提供具有一定容错水平的控制系统将是有利的。
2、因此,在第一方面,提供了一种用于致动三叶片风力涡轮机的桨距可调节转子叶片的变桨的转子控制系统,所述转子控制系统包括变桨致动单元,所述变桨致动单元用于确定要应用于变桨致动器的桨距修正信号,以便在所述叶片负载信号中的一个不可用的情况下致动所述桨距可调节转子叶片的变桨;
3、所述变桨致动单元被布置为:
4、接收所述桨距可调节转子叶片中的每一个的叶片负载信号,以及所述叶片负载信号中的每一个的可用性信号;
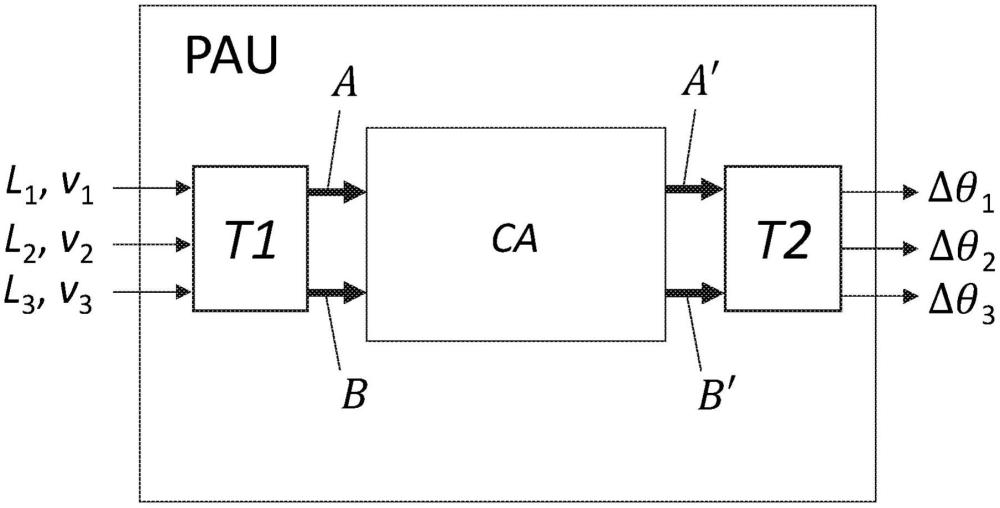
5、基于可用叶片负载信号构建组合负载信号,其中所述组合负载信号在参考系中沿第一参考方向和第二参考方向分别表示为第一信号分量(a)和第二信号分量(b);
6、对所述第一信号分量和所述第二信号分量执行控制动作(ca);以及
7、将所述桨距修正信号(δθ1,δθ2,δθ3)应用于所述变桨致动器;
8、其中,所述组合负载信号通过以下方式构建:
9、对所述叶片负载信号应用高通滤波器;
10、使用第一坐标变换(t1)将所述叶片负载信号变换到中间坐标系,其中所述负载信号在所述中间坐标系中的相关联分量中的每一个都是相互正交的,并且其中,在变换中,用估算信号替换不可用叶片负载信号;
11、将第一中间分量设置为所述第一坐标变换(t1)产生的变换后叶片负载信号的所述第一分量;以及
12、将第二中间分量设置为所述第一坐标变换(t1)产生的变换后叶片负载信号的所述第二分量;
13、旋转所述第一中间分量和所述第二中间分量,使它们沿所述第一参考方向和所述第二参考方向与所述参考系对齐;以及
14、将所述第一信号分量(a)和所述第二信号分量(b)分别设置为旋转后的第一中间分量和第二中间分量。
15、在一个实施例中,所述变桨致动单元可以按顺序执行上述步骤,也可以在上述步骤之间执行其他步骤。
16、本发明提供了一种转子控制系统,所述转子控制系统使用桨距修正信号来致动桨距可调节转子叶片的变桨,目的是在一个叶片负载传感器信号不可用的情况下降低叶片负载。本发明的实施例能够使涡轮机保持正常运行,即使在一个叶片负载信号丢失(因此只有两个叶片负载信号可用)的情况下,也能经由变桨来主动降低负载。
17、这可通过向执行控制动作的控制器提供输入信号来实现,其中输入信号基于可用负载传感器的负载信号。这通过基于可用叶片负载信号构建组合负载信号,并在控制动作中使用组合信号来实现。
18、通过对所述叶片负载信号应用高通滤波器,并使用第一坐标变换将两个可用叶片负载信号变换到中间坐标系,来构建所述组合负载信号,其中所述负载信号在所述中间坐标系中的相关联分量中的每一个都是相互正交的,并且其中,在变换中,用估算信号替换不可用叶片负载信号。因此,最初在各轴相距120度的旋转坐标系中获得的叶片负载信号值被变换为各轴相互呈法向的中间坐标系的信号值。
19、通过应用高通滤波器,组合使用估算信号作为不可用信号,可以在中间坐标系中获得所有三个负载信号的精确表示。在中间坐标系中,挥舞(拍打)力矩近似对应于推力测量值,边缘力矩近似对应于扭矩测量值。无论在哪种情况下,这些信号的变化通常频率较低。因此,通过应用高通滤波器,可以过滤掉不可用传感器的影响,从而高精度地估算不可用信号。
20、在一个实施例中,估算信号是两个可用叶片负载信号的叠加。这可以通过将估算信号构建为两个可用信号的线性组合,并将其偏移一个常量来实现。
21、对于三叶片涡轮机,可以进行三对可用叶片负载测量:ab叶片负载配对、ac叶片负载配对和bc叶片负载配对,其中三个叶片分别命名为a、b和c。如果一个传感器信号不可用,则只有一种配对有效,其中具体配对取决于不可用传感器信号;例如,如果叶片c的传感器不可用,则唯一有效的配对将是ab叶片对。第一中间分量被设置为第一坐标变换产生的变换后叶片负载信号的第一分量,第二中间分量被设置为第一坐标变换产生的变换后叶片负载信号的第二分量。这些中间分量形成一个矢量,然后该矢量进行旋转以沿第一参考方向和第二参考方向与参考系对齐,并作为输入被应用于控制元件,以执行在固定系中运行的控制动作。
22、作为转子控制系统的输入,接收桨距可调节转子叶片中的每一个的叶片负载信号和叶片负载信号中的每一个的可用性信号。在这方面,如果叶片负载信号变得不可用,则不会接收来自不可用传感器的叶片负载信号,而是接收空信号或接收损坏信号。如果信号不可用,转子控制系统将忽略仍然从对应负载传感器接收到的任何信号成分。
23、基于输入,构建组合负载信号。组合负载信号在参考系中沿第一参考方向和第二参考方向表示,从而提供第一信号分量和第二信号分量。参考系是其中应用控制动作的系。在实施例中,参考系是沿偏航力矩方向和倾斜力矩方向的固定系。参考系也可以是沿转子回转方向的固定系。控制动作在参考系中应用,从而提供产生的第一信号分量和产生的第二信号分量。受控信号可以被变换回旋转系,以作为桨距修正信号应用于变桨致动器。这可以通过对产生的第一信号分量应用m-叶片坐标变换来实现。m-叶片坐标变换可以是逆向科尔曼变换。
24、本发明的一个重要特征与坐标变换有关。一般来说,坐标变换是将在第一坐标系中表示的信号变换到第二坐标系。坐标系也可称为参考系。这种坐标变换可以是m-叶片变换,在本领域也称为多叶片变换。坐标变换的示例包括克拉克(clarke)变换和科尔曼(coleman)变换。不过,其他变换也可以落入坐标变换的范畴,即所谓的d-q变换和派克(park)变换或类似变换。技术人员有能力确定一种替代变换,这种变换严格来说可能并不是一种特定的变换,但可以等效的方式运行。
25、本文所用的坐标变换既可以原样(即不带前缀)应用,也可以逆向形式应用。在这方面,信号可以在相同或不同的坐标系中进行测量、修正和致动。特别是,坐标变换可以采用在旋转参考或坐标系中测量的信号,即在旋转叶片上获得的信号,并将该信号变换到由两个分量组成的固定参考系中。逆向m-叶片变换采用两个信号分量,并将它们变换回旋转系,以提供可施加到三个变桨致动器上的信号分量(桨距修正信号)。
26、在又一方面,本发明涉及一种风力涡轮机,所述风力涡轮机包括根据第一方面所述的转子控制系统。在又一方面,本发明涉及一种致动风力涡轮机的桨距可调节转子叶片的变桨的方法和一种计算机程序产品。所述计算机程序产品可以被提供在计算机可读存储介质上,或可从通信网络下载。所述计算机程序产品包括指令,当被加载到数据处理系统上时,所述指令将使数据处理系统(例如控制器的形式)执行所述指令。
27、一般来说,所述转子控制系统可以在一个单元或功能单元集合上实现,所述单元包括一个或多个处理器、输入/输出接口以及能够存储可由处理器执行的指令的存储器。
28、一般来说,本发明的各个方面可以在本发明的范围内以任何可能的方式进行组合和耦合。本发明的这些方面和其他方面、特征和/或优点将从下文所述的实施例中显而易见,并可参照下文所述的实施例得到阐明。
- 还没有人留言评论。精彩留言会获得点赞!