一种双风轮风电机组运行控制方法
本发明涉及风力发电控制,更具体的说是涉及一种双风轮风电机组运行控制方法。
背景技术:
1、目前,主流风电机组均采用单风轮水平轴形式,其风能利用率较低,随着风电机组朝着大型化的方向发展,其核心部件的关键技术受到诸多限制,迫切需要更为高效的新型风电机组。
2、串列式双风轮风电机组拥有前后两个风轮同时转化风能,在提高风能利用率的同时更加提高了风场的空间利用率,降低发电成本,在提高装置效率上有极大的发展潜力。但其前、后风轮在运行时会影响彼此原本的流场分布,造成其运行效率的降低,运用计算流体力学方法定量分析前、后风轮的相互影响存在不及时、不经济、计算量大等缺点。
3、因此,针对双风轮风电机组在运行时前、后风轮相互影响,成为同行从业人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供了一种双风轮风电机组运行控制方法,以解决双风轮风电机组在运行时前、后风轮相互影响,运行效率偏低的问题,提高系统的鲁棒性,充分发挥双风轮风电机组的高效风能转化能力。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明实施例提供了一种双风轮风电机组运行控制方法,所述双风轮风电机组为串列式双风轮风电机组,包含前、后两个风轮,所述方法包括以下步骤:
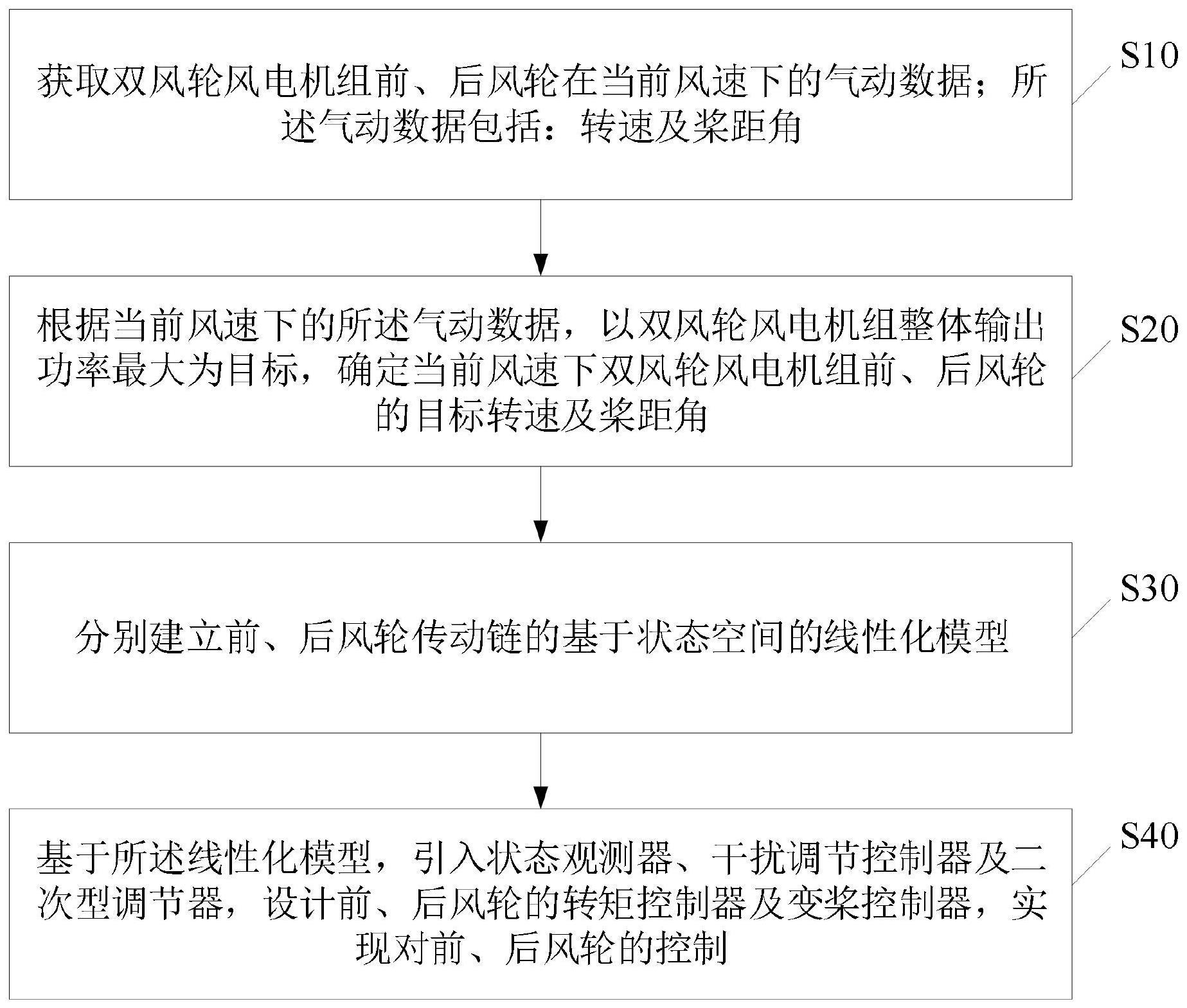
4、获取双风轮风电机组前、后风轮在当前风速下的气动数据;所述气动数据包括:转速及桨距角;
5、根据当前风速下的所述气动数据,以双风轮风电机组整体输出功率最大为目标,确定当前风速下双风轮风电机组前、后风轮的目标转速及桨距角;
6、建立前、后风轮传动链的基于状态空间的线性化模型;
7、基于所述线性化模型,引入状态观测器、干扰调节控制器及二次型调节器,设计前、后风轮的转矩控制器及变桨控制器,实现对前、后风轮的控制。
8、进一步地,获取双风轮风电机组中前风轮的转速由前风轮发电机侧转速传感器反馈信号获得,后风轮的转速由后风轮发电机侧转速传感器反馈信号获得。
9、进一步地,获取双风轮风电机组中前风轮的桨距角由前风轮变桨系统传感器反馈信号获得,后风轮的桨距角由后风轮变桨系统传感器反馈信号获得。
10、进一步地,根据当前风速下的所述气动数据,以双风轮风电机组整体输出功率最大为目标,确定当前风速下双风轮风电机组前、后风轮的目标转速及桨距角;包括:
11、根据当前风速下的前风轮和后风轮各自的气动数据,设计各自最佳叶尖速比,确定各自的切入、切出及额定风速,设计前风轮和后风轮各自的单机级控制策略;
12、根据所述前风轮和后风轮各自的单机级控制策略,并结合前、后风轮各自的转速-转矩曲线,确定以双风轮风电机组整体输出功率最大为目标,不同风速下前、后风轮所对应的最佳目标转速及桨距角。
13、进一步地,建立前、后风轮传动链的基于状态空间的线性化模型;包括:
14、建立前、后风轮传动链的基于状态空间的线性化模型,表示形式为:
15、
16、(1)式中,a、b、c、d分别为标准状态空间表示形式中的参数,γ为扰动参数,为x对t的一阶导数;x(t)为状态变量,u(t)为输入控制量,y(t)为输出变量,ud(t)为扰动量,ud(t)的变化体现出前、后风轮对彼此的影响。
17、进一步地,引入状态观测器包括:
18、构建状态观测器的数学模型为:
19、
20、(2)式中,为对t的一阶导数,为x(t)的状态估计值,为y(t)的状态估计值,kx为状态观测器增益。
21、进一步地,引入干扰调节控制器包括:
22、将重构的干扰状态引入反馈增益中,来减小或抑制前、后风轮运行时对彼此的影响,引入干扰模型:
23、
24、(3)式中,为xd对t的一阶导数,xd(t)为扰动的状态变量,ad和cd为根据前、后风轮的相互扰动特性确定的参数矩阵;
25、构建干扰状态观测器数学模型为:
26、
27、(4)式中,为对t的一阶导数,kd为干扰状态观测器增益;
28、构建估计误差的状态方程为:
29、
30、其中,为e(t)对t的一阶导数。
31、进一步地,引入二次型调节器包括:
32、构建反馈法则:
33、u(t)=gx(t)+gdxd(t) (6)
34、(6)式中,g为采用线性二次型调节控制器设计的反馈增益矩阵,gd为干扰校正反馈增益。
35、进一步地,设计前、后风轮的转矩控制器及变桨控制器,实现对前、后风轮的控制;包括:
36、结合公式(1)-(6),构建前、后风轮的转矩控制器及变桨控制器的状态空间方程,表示为:
37、
38、调节干扰校正反馈增益gd,减小‖bgd+γcd‖,从而减小或抑制运行时前、后风轮相互影响所形成的扰动输入对当前系统状态的影响,实现对前、后风轮的控制。
39、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种双风轮风电机组运行控制方法,从扰动控制角度入手,设计合适的双风轮运行控制方法,减小或抑制前、后风轮在运行时的相互影响,在工程中较易实现。该方法能够以整机最大功率输出为目标,通过实现一种基于线性二次型调节和干扰调节技术的控制策略,以解决双风轮风电机组在运行时前、后风轮的相互影响问题,提高系统鲁棒性,提高双风轮的整体风能吸收率,充分发挥双风轮风电机组的高效风能转化能力。
技术特征:
1.一种双风轮风电机组运行控制方法,其特征在于,所述双风轮风电机组为串列式双风轮风电机组,包含前、后两个风轮,所述方法包括以下步骤:
2.根据权利要求1所述的一种双风轮风电机组运行控制方法,其特征在于,获取双风轮风电机组中前风轮的转速由前风轮发电机侧转速传感器反馈信号获得,后风轮的转速由后风轮发电机侧转速传感器反馈信号获得。
3.根据权利要求1所述的一种双风轮风电机组运行控制方法,其特征在于,获取双风轮风电机组中前风轮的桨距角由前风轮变桨系统传感器反馈信号获得,后风轮的桨距角由后风轮变桨系统传感器反馈信号获得。
4.根据权利要求1所述的一种双风轮风电机组运行控制方法,其特征在于,根据当前风速下的所述气动数据,以双风轮风电机组整体输出功率最大为目标,确定当前风速下双风轮风电机组前、后风轮的目标转速及桨距角;包括:
5.根据权利要求1所述的一种双风轮风电机组运行控制方法,其特征在于,分别建立前、后风轮传动链的基于状态空间的线性化模型;包括:
6.根据权利要求5所述的一种双风轮风电机组运行控制方法,其特征在于,引入状态观测器包括:
7.根据权利要求6所述的一种双风轮风电机组运行控制方法,其特征在于,引入干扰调节控制器包括:
8.根据权利要求7所述的一种双风轮风电机组运行控制方法,其特征在于,引入二次型调节器包括:
9.根据权利要求8所述的一种双风轮风电机组运行控制方法,其特征在于,设计前、后风轮的转矩控制器及变桨控制器,实现对前、后风轮的控制;包括:
技术总结
本发明公开了一种双风轮风电机组运行控制方法,包括:获取双风轮风电机组前、后风轮在当前风速下的转速及桨距角;以双风轮风电机组整体输出功率最大为目标,确定当前风速下双风轮风电机组前、后风轮的目标转速及桨距角;分别建立前、后风轮传动链的基于状态空间的线性化模型;基于所述线性化模型,引入状态观测器、干扰调节控制器及二次型调节器,设计前、后风轮的转矩控制器及变桨控制器,实现对前、后风轮的控制。该方法能够以整机最大功率输出为目标,通过实现一种基于线性二次型调节和干扰调节技术的控制策略,以解决双风轮风电机组在运行时前、后风轮的相互影响问题,提高系统鲁棒性,提高双风轮的整体风能吸收率,充分发挥双风轮风电机组的高效风能转化能力。
技术研发人员:田德,王浩东,邓英,管龙生,王永,武广兴,刘永前,孟慧雯,姚中原,陈正华,施俊佼,王方锐,张尤微,李天宇
受保护的技术使用者:华北电力大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!