一种唇罩和喉道双级连续可调的宽速域高超声速进气道及其控制方法、设计方法
本发明涉及高超声速进气道设计领域,具体涉及一种唇罩和喉道双级连续可调的宽速域高超声速进气道及其控制方法、设计方法。
背景技术:
1、进气道是飞行器中向发动机输送高品质气体的部件,作为超声速推进系统的一个重要组成部分,设计能够在稳定工作的同时具有较高性能指标的进气道对提高整个飞行器发动机性能有着重要意义。
2、对于宽速域飞行器来说,各工况点下的捕获流量和压缩性能均需符合要求。超声速进气道一般选择最大飞行马赫数作为设计状态,此工况下的进气道性能达到几何机构不变下的最优解,并以此作为基准型面进行进一步设计。在马赫数工况小于设计马赫数时,由于压缩激波角增大,导致进气道溢流增加、捕获流量减小,使得流量系数小于指标要求;与此同时,进气道压缩量变小,喉道马赫数较大,抗反压能力减弱,超临界状态更加不稳定。当马赫数工况降低时,自起动收缩比减小,设计状态下的喉道可能会出现喉道壅塞状态,无法保证进气道的正常工作。因此,做到在正常工作条件下进气道捕获流量、压缩性能达标是极为必要的。
3、对传统的定几何或变单一机构的进气道而言,难以同时兼顾捕获流量和压缩性能,只能使设计状态下的指标达到要求,而非设计状态下工况性能的提高较难实现,无法适应工况频繁变化所带来的影响。例如中国发明专利cn 107605601 a中公开了“一种捕获面积与喉道面积同步调节的超声速进气道”,使用四级连杆机构调节喉道段时,通过一倾斜槽带动唇罩进行转动调节,实现了进气道喉道面积与捕获面积的同步调节;但实现同步调节的同时对进气道的两个独立调节机构也施加了几何约束,一个进气道喉道面积只能对应一种进气道捕获面积,无法以更多种机构位置组合来进行研究,做风洞试验研究时也无法探究进气道的工作边界和极限性能。
技术实现思路
1、发明目的:本发明的目的是提供一种唇罩和喉道双级连续可调的宽速域高超声速进气道及其控制方法、设计方法。
2、技术方案:一种宽速域高超声速进气道,包括进气道内壁面、唇罩、进气道内壁面与唇罩共同围成的进气道内通道、由进气道内通道向后延伸的水平可动等直段、固定设置在所述水平可动等直段内侧的水平固定段,所述进气道内壁面包括位于进气道内通道入口处的第一压缩面、由所述第一压缩面向后延伸的第二等熵压缩面、铰接于所述第二等熵压缩面后端的可动内收缩段、铰接于所述可动内收缩段后端的可动喉道段、铰接于所述可动喉道段后端的可动扩压段;所述可动扩压段后端铰接于所述水平可动等直段,所述水平可动等直段滑动设置在所述水平固定段上;所述可动喉道段内部设有喉道驱动模块,所述喉道驱动模块驱动可动喉道段靠近唇罩或者远离唇罩运动;所述唇罩包括位于进气道内通道后端的固定唇罩、滑动设置在所述固定唇罩上的水平可动唇罩、连接所述水平可动唇罩的唇罩驱动模块,所述唇罩驱动模块驱动水平可动唇罩前后运动。
3、具体的,所述喉道驱动模块包括一端铰接所述可动喉道段内侧的两个转动臂、与所述转动臂另一端铰接的第一水平推杆、与第一水平推杆相连的第一驱动装置。
4、具体的,所述唇罩驱动模块包括连接所述水平可动唇罩后端的第二水平推杆、连接所述第二水平推杆的第二驱动装置。
5、具体的,所述水平可动等直段通过水平导轨滑动设置并限位在所述水平固定段上。
6、具体的,所述喉道驱动模块还包括第一平动限位槽,所述第一水平推杆设置在第一平动限位槽中。
7、具体的,所述唇罩驱动模块还包括第二平动限位槽,所述第二水平推杆设置在第二平动限位槽中。
8、具体的,所述两个转动臂长度相等,两个转动臂与可动喉道段、第一水平推杆分别铰接的两点的间距相等。
9、本发明还提供一种上述宽速域高超声速进气道的控制方法,包括以下步骤:
10、当飞行马赫数为亚声速时,喉道驱动模块带动可动喉道段远离唇罩至最大距离,同时唇罩驱动模块带动水平可动唇罩向前移动至最前端,此时喉道面积、进气道捕获面积均最大;
11、当飞行马赫数增大至进气道起动马赫数时,喉道驱动模块带动可动喉道段向唇罩靠近,水平可动唇罩保持不动,此时喉道面积变小,进气道捕获面积保持最大;
12、当飞行马赫数增大至设计马赫数过程中,喉道驱动模块带动可动喉道段继续向唇罩靠近,同时唇罩驱动模块带动水平可动唇罩向后移动,此时喉道面积、进气道捕获面积减小;
13、当飞行马赫数达到设计马赫数时,可动喉道段靠近唇罩至最小距离,水平可动唇罩位于最后端,此时喉道面积、进气道捕获面积均为最小。
14、当喉道工作马赫数大于预设工作马赫数时,喉道驱动模块带动可动喉道段向唇罩靠近,使喉道面积减小;当喉道工作马赫数小于预设工作马赫数时,喉道驱动模块带动可动喉道段远离唇罩,使喉道面积增大;当进气道捕获流量小于所需流量时,唇罩驱动模块带动水平可动唇罩向前运动,使进气道捕获面积增大。
15、本发明还提供一种上述宽速域高超声速进气道的设计方法,包括以下步骤:
16、根据进气道气动性能指标需求设计第一级压缩面、第二级等熵压缩面与水平可动唇罩的前唇口位置,得到设计马赫数工况下的进气道基准型面,通过仿真校验调整得到该工况下的基准型面;
17、计算第一压缩面、第二等熵压缩面构成的三维二元压缩面的基准流场,确定进气道的唇口坐标;
18、计算各不同工况下的进气道性能,并通过仿真迭代调整得到对应各工况条件的可动喉道段与唇罩相应位置,具体实施措施为:当喉道工作马赫数大于设计马赫数时,喉道驱动模块带动可动喉道段向唇罩靠近,使喉道面积减小;当喉道马赫数小于设计马赫数时,喉道驱动模块带动可动喉道段远离唇罩,使喉道面积增大。以此往复迭代,直到喉道马赫数指标符合要求为止,得到各工况下对应的最佳喉道面积。
19、有益效果:与现有技术相比,本发明的显著效果是:采用多连杆铰接机构的进气道内壁面设计及可独立调节的唇罩设计,可同时独立调节进气道的压缩量和捕获面积,且结构稳定,高度可控,保证了进气道捕获流量和压缩性能在各马赫数工况下达到指标要求,实现进气道较好的起动性能,拓宽了进气道工作范围,同时还适用于在风洞试验中对进气道极限性能的探索。
技术特征:
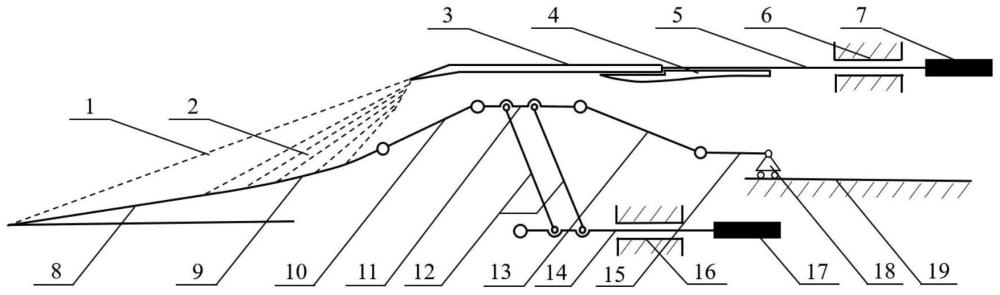
1.一种唇罩和喉道双级连续可调的宽速域高超声速进气道,其特征在于,包括进气道内壁面、唇罩、进气道内壁面与唇罩共同围成的进气道内通道、由进气道内通道向后延伸的水平可动等直段(15)、固定设置在所述水平可动等直段(15)内侧的水平固定段(19),所述进气道内壁面包括位于进气道内通道入口处的第一压缩面(8)、由所述第一压缩面(8)向后延伸的第二等熵压缩面(9)、铰接于所述第二等熵压缩面(9)后端的可动内收缩段(10)、铰接于所述可动内收缩段(10)后端的可动喉道段(11)、铰接于所述可动喉道段(11)后端的可动扩压段(13);所述可动扩压段(13)后端铰接于所述水平可动等直段(15),所述水平可动等直段(15)滑动设置在所述水平固定段(19)上;所述可动喉道段(11)内部设有喉道驱动模块,所述喉道驱动模块驱动可动喉道段(11)靠近唇罩或者远离唇罩运动;所述唇罩包括位于进气道内通道后端的固定唇罩(4)、滑动设置在所述固定唇罩(4)上的水平可动唇罩(3)、连接所述水平可动唇罩(4)的唇罩驱动模块,所述唇罩驱动模块驱动水平可动唇罩(4)前后运动。
2.根据权利要求1所述的宽速域高超声速进气道,其特征在于:所述喉道驱动模块包括一端铰接所述可动喉道段(11)内侧的两个转动臂(12)、与所述转动臂(12)另一端铰接的第一水平推杆(14)、与第一水平推杆(14)相连的第一驱动装置(17)。
3.根据权利要求1所述的宽速域高超声速进气道,其特征在于:所述唇罩驱动模块包括连接所述水平可动唇罩(3)后端的第二水平推杆(5)、连接所述第二水平推杆(5)的第二驱动装置(7)。
4.根据权利要求1所述的宽速域高超声速进气道,其特征在于:所述水平可动等直段(15)通过水平导轨(18)滑动设置并限位在所述水平固定段上。
5.根据权利要求2所述的宽速域高超声速进气道,其特征在于:所述喉道驱动模块还包括第一平动限位槽(16),所述第一水平推杆(14)设置在第一平动限位槽(16)中。
6.根据权利要求3所述的宽速域高超声速进气道,其特征在于:所述唇罩驱动模块还包括第二平动限位槽(6),所述第二水平推杆(5)设置在第二平动限位槽(6)中。
7.根据权利要求2所述的宽速域高超声速进气道,其特征在于:所述两个转动臂(12)长度相等,两个转动臂(12)与可动喉道段(11)、第一水平推杆(14)分别铰接的两点的间距相等。
8.一种权利要求1-7任一项所述的宽速域高超声速进气道的控制方法,其特征在于,包括以下步骤:
9.根据权利要求8所述的宽速域高超声速进气道的控制方法,其特征在于:所述控制方法还包括:
10.一种权利要求1-7任一项所述的宽速域高超声速进气道的设计方法,其特征在于,包括以下步骤:
技术总结
本发明提供一种唇罩和喉道双级连续可调的宽速域高超声速进气道及其控制方法、设计方法,采用多连杆铰接机构的进气道内壁面设计及可独立调节的唇罩设计,通过转动臂巧妙地间接控制喉道面积、通过平移唇罩控制捕获面积,可同时独立调节进气道的压缩量和捕获面积,且结构稳定,高度可控,保证了进气道捕获流量和压缩性能在各马赫数工况下达到指标要求,实现了进气道较好的起动性能,拓宽了进气道工作范围,同时还适用于在风洞试验中对进气道极限性能的探索。
技术研发人员:黄河峡,兰磊,许耀宇,谭慧俊,周志宏,李方波,秦源,徐晨恩,张逸飞,吴智锋,靳乐
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!