隧道机器人维护系统的制作方法
1.本技术涉及机器人维护的领域,尤其是涉及隧道机器人维护系统。
背景技术:
2.众所周知,随着经济的发展,机器人逐渐代替人类在各个领域进行作业,现有机器人进入的环境,人类无法长时间生存或者无法进入,恶劣的环境导致机器人的寿命也会缩短,进行检修的频率也相应的增多。
3.针对上述中的相关技术,发明人认为在现有技术中,隧道内的机器人设置于隧道的上方,工人使用工具到达隧道上方对轨道机器人进行检修,难度过大。
技术实现要素:
4.为了降低轨道机器人的检修难度,本技术提供隧道机器人维护系统。
5.本技术提供的隧道机器人维护系统采用如下的技术方案:
6.隧道机器人维护系统,包括行轨,行轨的一端设置有能趋向靠近行轨或者远离行轨方向运动的检测组件,检测组件包括设置于行轨一侧的移动轨,行轨靠近移动轨的一侧固接有支撑杆,移动轨对应行轨支撑杆的位置开设有卡接槽,支撑杆能够插设于卡接槽内。
7.通过采用上述技术方案,在需要对轨道机器人进行检修的时候,使移动轨趋向靠近行轨的方向进行运动,使行轨的支撑杆插设于移动柜的卡接槽内,行轨与移动轨相互抵接,轨道机器人从行轨移动至移动轨上,进行检修,无需上轨道取下机器人,降低了维修难度。
8.可选的,支撑杆远离行轨的一端设置有多个铰接轴,铰接轴上设置有多个挡板。
9.通过采用上述技术方案,轨道机器人在行轨进行移动,当移动至行轨的一端时,往往由于轨道机器人本身的惯性,有脱轨的几率,进而导致机器人的损坏,挡板设置于支撑杆的一端,挡板转动至与支撑杆的长度方向垂直时,能够遮挡轨道机器人,减少轨道机器人脱轨的几率。
10.可选的,支撑杆对应挡板的位置开设有能够容纳挡板的容纳槽。
11.通过采用上述技术方案,当挡板趋向支撑杆的方向进行转动的时候,挡板转动至容纳槽内且挡板抵接于支撑杆的刺鼻,使挡板与支撑杆处于同一平面。
12.可选的,铰接轴套设有扭簧,扭簧的一端固接于挡板,扭簧的另一端固接于支撑杆。
13.通过采用上述技术方案,常态下,扭簧驱动挡板垂直于支撑杆,在支撑杆插设于卡接槽内,对挡板进行折叠。
14.可选的,移动轨远离行轨的一侧倾斜设置有倾斜轨。
15.通过采用上述技术方案,在轨道机器人到达移动轨后,通过倾斜轨,将轨道机器人引导向下运动,使工作人员更好的对轨道机器人进行检修。
16.可选的,卡接槽内设置有能够与支撑杆抵接的滚珠,支撑杆对应滚珠的位置开设
有承接槽。
17.通过采用上述技术方案,当支撑杆插设于卡接槽内,滚珠能够抵接于支撑杆进行转动,当行轨与承接轨相互抵接时,滚珠抵接于支撑杆内的承接槽内,辅助限定承接轨与行轨的相对位置不发生改变。
18.可选的,卡接槽内开设有滑槽,滑槽内滑移连接有滚珠块,滚珠设置于滚珠块内,滑槽内设置有与滑槽的长度方向相同的压簧。
19.通过采用上述技术方案,支撑杆插设于卡接槽内时,使滚珠块在滑槽内趋向远离支撑杆的方向进行滑移,滚珠始终抵接于支撑杆的侧壁,且摁压压簧,使压簧具有推动滚珠块趋向靠近支撑杆的力。
20.可选的,检测组件的下方设置有能够驱动检测组件进行运动的止推万向轮。
21.通过采用上述技术方案,在需要对指定行轨上的轨道机器人进行检修的时候,通过止推万向轮带动检测组件进行移动至指定位置进行作业。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.在需要对轨道机器人进行检修的时候,使移动轨趋向靠近行轨的方向进行运动,使行轨的支撑杆插设于移动柜的卡接槽内,行轨与移动轨相互抵接,轨道机器人从行轨移动至移动轨上,进行检修,无需上轨道取下机器人,降低了维修难度;
24.2.轨道机器人在行轨进行移动,当移动至行轨的一端时,往往由于轨道机器人本身的惯性,有脱轨的几率,进而导致机器人的损坏,挡板设置于支撑杆的一端,挡板转动至与支撑杆的长度方向垂直时,能够遮挡轨道机器人,减少轨道机器人脱轨的几率;
25.3.支撑杆插设于卡接槽内时,使滚珠块在滑槽内趋向远离支撑杆的方向进行滑移,滚珠始终抵接于支撑杆的侧壁,且摁压压簧,使压簧具有推动滚珠块趋向靠近支撑杆的力。
附图说明
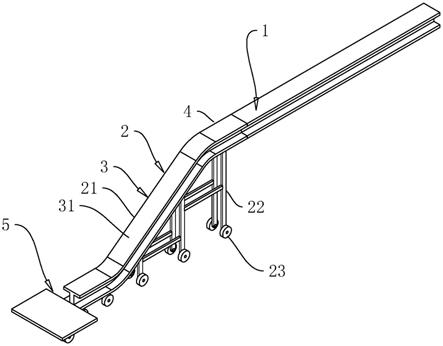
26.图1是本实施例中隧道机器人维护系统的整体示意图。
27.图2是本实施例中隧道机器人维护系统的整体剖面示意图。
28.图3是本实施例中隧道机器人维护系统突出支撑杆的整体示意图。
29.图4是图2的a的局部放大图。
30.附图标记说明:1、行轨;2、检测组件;11、支撑杆;12、铰接轴;13、挡板;14、扭簧;15、容纳槽;21、移动轨;22、承接架;23、止推万向轮;3、倾斜部;31、倾斜轨;4、水平部;41、承接轨;42、卡接槽;43、滑槽;44、滚珠块;45、滚珠;46、压簧;47、承接槽;5、检修部;51、检修平台。
具体实施方式
31.以下结合附图1
‑
4对本技术作进一步详细说明。
32.本技术实施例公开隧道机器人维护系统。
33.参照图1和图2,隧道机器人维护系统包括水平设置的行轨1,设置于行轨1一端的检测组件2。
34.参照图1和图3,行轨1为工字轨,行轨1的端部固接有长度方向与行轨1长度方向相
同的支撑杆11,支撑杆11靠近行轨1的一端固接于行轨1横截面的中部,支撑杆11远离行轨1的一端转动连接有多个铰接轴12,铰接轴12上设置有多个挡板13,铰接轴12套设有扭簧14,扭簧14的一端固接于挡板13,扭簧14的另一端固接于支撑杆11,常态下,挡板13竖直设置且垂直于支撑杆11的长度方向,挡板13仅能够趋向靠近行轨1的方向进行转动,支撑杆11对应挡板13的位置开设有容纳槽15,在挡板13趋向靠近支撑杆11方向进行转动的时候,挡板13的外周面抵接于容纳槽15的内周面;在使用时,挡板13趋向靠近支撑杆11进行转动的时候,转动扭簧14,使扭簧14能够使挡板13趋向远离支撑杆11方向转动的趋势,在挡板13转动至抵接于支撑杆11时,挡板13设置于容纳槽15内。
35.参照图3和图4,检测组件2包括设置于行轨1一端的移动轨21,移动轨21的下侧设置有承接架22,承接架22的下侧固接有多个止推万向轮23,移动轨21包括倾斜部3、设置于倾斜部3一端的水平部4和设置于倾斜部3远离水平部4一端的检修部5;水平部4包括设置于行轨1靠近支撑杆11一侧的承接轨41,承接轨41靠近支撑杆11的位置开设有卡接槽42,支撑杆11能够插设于卡接槽42内且支撑杆11抵接于卡接槽42内周面,卡接槽42内开设与卡接槽42长度方向垂直的滑槽43,滑槽43内滑移连接有滚珠块44,滚珠块44靠近卡接槽42的一侧内设置有滚珠4,滚珠块44远离卡接槽42的一侧设置有压簧46,压簧46的轴线方向与滑槽43的长度方向相同,压簧46的一端固接于滚珠块44,压簧46的另一端固接于滑槽43,支撑杆11对应卡接槽42内滚珠45的位置开设有圆弧状承接槽47,滚珠45能够抵接于承接槽47内;使用时,将检测组件2趋向靠近行轨1的方向进行推动,使承接轨41与行轨1处于同一水平面,承接轨41趋向靠近行轨1的方向将进行推动,行轨1的支撑杆11插设于承接轨41的卡接槽42内,在运动的过程中,承接轨41使挡板13趋向靠近行轨1的方向进行转动且插设于卡接槽42内,支撑杆11插设于卡接槽42内时,使滚珠块44在滑槽43内趋向远离支撑杆11的方向进行滑移,滚珠45始终抵接于支撑杆11的侧壁,且摁压压簧46,使压簧46具有推动滚珠块44趋向靠近支撑杆11的力,在支撑杆11完全插入,同时承接轨41的端部与行轨1的端部抵接时,承接槽47与滑槽43共线,压簧46推动滚珠块44趋向靠近支撑杆11的方向进行运动,滚珠45抵接于承接槽47内。
36.参照图1和图4,倾斜部3包括倾斜轨31,倾斜轨31以承接轨41为起点,趋向远离承接轨41的方向倾斜向下设置;检修部5设置于倾斜轨31远离承接轨41的一端,检修部5包括水平设置的检修平台51。
37.本技术实施例隧道机器人维护系统的实施原理为:当轨道机器人在行轨1上移动时,通过挡板13能够防止轨道机器人运动到端部时,因惯性的原因而导致的脱轨;在需要对轨道机器人进行检修时,先推动检测组件2趋向靠近行轨1的一侧,通过承接轨41将挡板13趋向靠近行轨1的方向进行转动至容纳槽15内,支撑杆11插设于卡接槽42内且摁压压簧46,使滚珠45始终抵接于支撑杆11,当承接轨41的端部抵接于行轨1时,滚珠45抵接于承接槽47内,起到辅助限位的作用,在承接轨41与行轨1抵接后,轨道机器人沿着承接轨41,随着倾斜轨31的倾斜角度,到达检修平台51进行检修。
38.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1