一种同步卸扣助力系统及控制方法与流程
1.本发明涉及一种水平定向钻机技术领域,具体来说是指一种同步卸扣助力系统及控制方法。
背景技术:
2.近十几年来,随着国家提倡清洁能源的应用占比提高,大量的油气、煤改气、lng接收管道等大直径长输能源管网的铺设,超大吨位水平定向钻机得到了越来越广泛的应用,成为非开挖工程施工必不可少的施工利器。
3.现有的大型水平定向钻机的卸扣系统从中小型钻机发展而来,在拆卸钻杆时,完全依靠虎钳的反转扭矩拧松螺纹,其技术问题在于,在虎钳夹紧钻杆的一端反转时,钻杆的另一端螺纹连接在动力头主轴上,传统钻机的动力头由液压马达驱动,液压马达由液压闭式系统或“o”型机能的阀组供油,此时的液压马达对钻杆反转起阻碍作用,会减小虎钳的实际卸扣力矩,在施工中出现卸扣打滑现象。
技术实现要素:
4.本发明要解决的是以上背景技术中提到的技术问题,提供一种能够自动控制动力头主轴反转配合虎钳拆卸钻杆的同步卸扣助力系统,所述一种同步卸扣助力系统还能有效提高拆卸钻杆的效率。
5.本发明还提出一种配合上述同步卸扣助力系统使用的控制方法。
6.根据本发明提供的第一方面的同步卸扣助力系统,包括:旋转卸扣模块,所述旋转卸扣模块包括前虎钳和后虎钳,所述前虎钳和所述后虎钳固定连接在钻架体的一侧,所述前虎钳和所述后虎钳水平方向并排放置,所述前虎钳设于后虎钳远离钻架体的一侧;检测控制模块,所述检测控制模块包括plc控制器、流量控制组件和监测组件,所述plc控制器与流量控制组件和检测组件均通讯连接;动力模块,所述动力模块与plc控制器通讯连接。
7.进一步的,所述流量控制组件包括旋转阀和旋转泵,所述旋转阀与旋转泵均与plc控制器通讯连接,所述旋转泵是动力模块的动力来源,所述旋转阀控制旋转泵下液压油路的开合。
8.进一步的,所述旋转卸扣模块还包括驱动器、发动机ecu、虎钳泵、虎钳阀、前虎钳夹紧油缸、前虎钳夹紧开关、后虎钳夹紧油缸、后虎钳夹紧开关、后虎钳旋转油缸、旋转卸扣开关,所述发动机ecu与驱动器和plc控制器通讯连接,所述驱动器为虎钳泵和旋转泵提供转速,所述虎钳泵为前虎钳夹紧油缸、后虎钳夹紧油缸和后虎钳旋转油缸提供动力,所述虎钳阀上设有前虎钳夹紧开关、后虎钳夹紧开关和旋转卸扣开关,所述前虎钳夹紧开关控制前虎钳夹紧油缸的伸缩,所述后虎钳夹紧开关控制后虎钳夹紧油缸的伸缩,所述旋转卸扣开关控制后虎钳旋转油缸的伸缩,所述前虎钳与前虎钳夹紧油缸相连,所述后虎钳与后虎钳夹紧油缸和后虎钳旋转油缸相连。
9.进一步的,所述动力模块包括液压马达、旋转减速机、动力头箱体和动力头主轴,
所述旋转泵通过旋转阀为液压马达提供动力,所述液压马达的输出端与旋转减速机的输入端直连,所述旋转减速机的输出端与动力头箱体的输入端直连,所述动力头主轴与动力头箱体的输出轴固定连接,所述动力头主轴的另一端通过螺纹连接钻杆,所述钻杆设于前虎钳和后虎钳的夹紧中心,所述液压马达、旋转减速机和动力头箱体均固定连接在钻架体上。
10.进一步的,所述监测组件包括压力传感器、转速传感器和马达变量电磁阀,所述压力传感器、转速传感器和马达变量电磁阀均与plc控制器和液压马达通讯连接。
11.根据本发明的同步卸扣助力系统的控制方法包括:步骤s1,启动驱动器并开启虎钳阀和旋转阀;步骤s2,开启前虎钳夹紧开关和后虎钳夹紧开关,前虎钳和后虎钳夹紧钻杆;步骤s3,开启旋转卸扣开关,后虎钳旋转油缸驱动后虎钳旋转,后虎钳驱动钻杆旋转。
12.进一步的,所述步骤s3包括:步骤s31,开启旋转卸扣开关,后虎钳旋转油缸驱动后虎钳旋转,后虎钳驱动钻杆旋转;步骤s32,计算后虎钳旋转速度;后虎钳旋转的同时,plc控制器通过发动机ecu获取驱动器转速,通过程序计算出后虎钳旋转的速度。
13.进一步的,还包括步骤s4,plc控制器获取压力传感器所测得液压马达的油压压力值、转速传感器所测得液压马达的转速值和马达变量电磁阀所测得的马达变量值,并依此计算液压马达的工作状态;还包括步骤s5,plc控制器根据所述后虎钳旋转速度,计算并调节旋转泵、旋转阀的流量或液压马达的排量,使液压马达输出合适的转速,使动力头主轴的转速与后虎钳旋转速度匹配,达到同步反向运动的效果。
14.本发明与现有技术相比的优点在于:在不增加现有虎钳结构件和不改变外部尺寸的条件下,通过增加检测控制模块实现卸扣时主轴同步反转,提高虎钳的卸扣能力,提高大扭矩施工中的一次卸扣成功率,避免因此而影响国家重大工程的工期。
附图说明
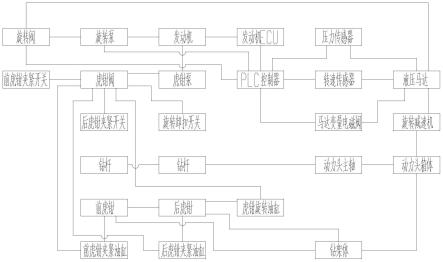
15.图1为本发明实施例的同步卸扣助力系统原理示意图。
具体实施方式
16.下面结合附图对本发明做进一步的详细说明。
17.结合图1所示,一种同步卸扣助力系统,其特征在于,包括:旋转卸扣模块、检测控制模块和动力模块。
18.所述旋转卸扣模块包括前虎钳、后虎钳、驱动器、发动机ecu、虎钳泵、虎钳阀、前虎钳夹紧油缸、前虎钳夹紧开关、后虎钳夹紧油缸、后虎钳夹紧开关、后虎钳旋转油缸、旋转卸扣开关,所述前虎钳和所述后虎钳固定连接在钻架体的一侧,所述前虎钳和所述后虎钳水平方向并排放置,所述前虎钳设于后虎钳远离钻架体的一侧,所述发动机ecu与驱动器通讯连接,所述驱动器为虎钳泵提供转速,所述虎钳泵为前虎钳夹紧油缸、后虎钳夹紧油缸和后虎钳旋转油缸提供动力,所述虎钳阀上设有前虎钳夹紧开关、后虎钳夹紧开关和旋转卸扣开关,所述前虎钳夹紧开关控制前虎钳夹紧油缸的伸缩,所述后虎钳夹紧开关控制后虎钳夹紧油缸的伸缩,所述旋转卸扣开关控制后虎钳旋转油缸的伸缩,所述前虎钳与前虎钳夹紧油缸相连,所述后虎钳与后虎钳夹紧油缸和后虎钳旋转油缸相连。
19.所述检测控制模块包括plc控制器、流量控制组件和监测组件,所述plc控制器与流量控制组件和检测组件均通讯连接,所述plc控制器与发动机ecu通讯连接。
20.所述流量控制组件包括旋转阀和旋转泵,所述旋转阀与旋转泵均与plc控制器通讯连接,所述驱动器为旋转泵提供转速,所述旋转阀控制旋转泵下液压油路的开合。
21.所述监测组件包括压力传感器、转速传感器和马达变量电磁阀,所述压力传感器、转速传感器和马达变量电磁阀均与plc控制器和液压马达通讯连接。
22.所述动力模块包括液压马达、旋转减速机、动力头箱体和动力头主轴,所述旋转泵通过旋转阀为液压马达提供动力,所述液压马达的输出端与旋转减速机的输入端直连,所述旋转减速机的输出端与动力头箱体的输入端直连,所述动力头主轴与动力头箱体的输出轴固定连接,所述动力头主轴的另一端通过螺纹连接钻杆,所述钻杆设于前虎钳和后虎钳的夹紧中心,所述液压马达、旋转减速机和动力头箱体均固定连接在钻架体上。
23.本发明在具体实施时的工作原理和控制方法如下:
24.plc控制器与发动机ecu、旋转泵、旋转阀、压力传感器、转速传感器、马达变量电磁阀均通讯连接。
25.步骤s1,启动驱动器并开启虎钳阀和旋转阀。
26.步骤s2,开启前虎钳夹紧开关和后虎钳夹紧开关,此时前虎钳和后虎钳夹紧钻杆。
27.步骤s3,开启旋转卸扣开关,后虎钳旋转油缸驱动后虎钳旋转,后虎钳驱动钻杆旋转。
28.步骤s31,开启旋转卸扣开关,后虎钳旋转油缸驱动后虎钳旋转,后虎钳驱动钻杆旋转。
29.步骤s32,计算后虎钳旋转速度;
30.后虎钳旋转的同时,plc控制器通过发动机ecu获取驱动器转速,通过程序计算出后虎钳旋转的速度。
31.步骤s4,plc控制器获取压力传感器所测得液压马达的油压压力值、转速传感器所测得液压马达的转速值和马达变量电磁阀所测得的马达变量值,并依此计算获取液压马达的工作状态。
32.步骤s5,plc控制器根据步骤s3所述后虎钳旋转速度,计算并调节旋转泵、旋转阀的流量或液压马达的排量,使液压马达输出合适的转速,使动力头主轴的转速与后虎钳旋转速度匹配,达到同步反向运动的效果。
33.在本发明的描述中,需要理解的是,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
34.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1