一种适用于快速掘进易于移动智能锚杆台车
1.本发明涉及锚杆台车技术领域,尤其涉及一种适用于快速掘进易于移动智能锚杆台车。
背景技术:
2.锚杆台车作为用于锚杆注浆支护的一体化可移动设备,被广泛用在巷道的加固支护中,现有的锚杆台车均带有操作臂,通过控制操作臂实现钻孔、打设锚杆,以达到巷道支护目的,目前的锚杆机构在实际操作过程中锚杆台车难以在复杂的地质条件下高效施工,井下环境对设备施工的影响较大,造成施工效率较低,不易于井下工作人员操作从而存在安全隐患;锚杆台车与掘进机之间需要留有一定距离,存在塌方危险,安全隐患较大的问题,传统设备无法对巷道进行预处理直接预获取单次作业的巷道锚杆需求量,无法提前预准备,且无法通过预处理与实时处理有机结合,导致无法在线及时地安装锚杆形成巷道支护并同步进行塌方预警工作,造成效率较低和安全隐患较大的问题;
3.针对上述的技术缺陷,现提出一种解决方案。
技术实现要素:
4.本发明的目的在于:本发明在实现井下或巷道掘护一体化提高工作人员安全的前提下,通过预输入单次作业的信息并对信息进行分析处理自动化生成可增加或不变的支护线(划分线)及其内的锚杆数量,从而生成巷道的划分挖护立体图,直接得到并准备对应锚杆数量,提高工作效率,然后在开挖支护前通过对准备开挖支护的巷道进行预采集其内信息并得到其薄弱区域位置(低灰度区域或中灰度区域),并对薄弱区域位置进行依次破碎挖掘作业,改变其支撑点,从而改变其应力,使其他区域挖掘更加简单,挖掘的速度更高,当挖掘完成后,在线及时地安装锚杆形成巷道支护并同步进行塌方预警工作,从而实现预处理和实时处理结合的自动化挖掘支护功能,使本发明自动化程度更高、智能性更强,提高工作效率。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种适用于快速掘进易于移动智能锚杆台车,包括液压控制装置和控制面板,所述控制面板电性连接有超声波传感器,所述超声波传感器安装于液压控制装置的外端,所述液压控制装置的顶端安装有钻锚装置和凿固体装置,所述液压控制装置的底部安装有刮板输送装置和驱动行走装置,所述刮板输送装置的两侧对称安装有铲板和机尾板,所述驱动行走装置传动连接有履带,所述履带对称设有两个,且履带处适配有防倾倒装置,所述防倾倒装置对称安装于驱动行走装置的边线处,所述控制面板包括:
7.信息输入模块,用于输入巷道挖护需求信息并发送到数据储存单元储存;其中巷道挖护需求信息由挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸和巷道挖掘的目标长度构成;
8.数据储存单元,用于储存对应数据;
9.巷道分析单元,通过数据储存单元获取巷道挖护需求信息经划分处理生成锚杆需求总量和巷道的划分挖护立体图并将其发送到数据储存单元储存供工作人员调整或不调整;
10.挖护执行单元,通过数据储存单元获取工作人员调整或不调整的巷道的划分挖护立体图并结合超声波传感器采集的巷道未挖掘处的实时立体图进行区域锁定处理并生成编辑塌方预警语音提醒字符的警报预警信号和自动化控制设备进行挖护一体作业的执行控制信号。
11.进一步,所述钻锚装置包括液压多级伸缩杆,所述液压多级伸缩杆的输出轴固定安装有旋转装置,所述旋转装置的输出轴固定安装有支撑架,所述支撑架的顶面固定设有垫板,所述垫板的顶面固定设有垫块和钻锚转盘装置,所述钻锚转盘装置内传动设有转盘钻孔头和转盘冲击头,所述转盘钻孔头安装有麻花钻杆和转盘冲击头,所述麻花钻杆的顶端固定安装有钻头,所述垫块设于麻花钻杆处,且转盘冲击头内安装有锚杆。
12.进一步,所述凿固体装置包括液压机械臂,所述液压机械臂安装于液压控制装置上,且液压机械臂与液压控制装置传动连接,所述液压机械臂的输出轴端安装有液压摇臂,所述液压摇臂的输出轴安装有破碎截割头。
13.进一步,划分处理的具体过程如下:
14.获取到挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸和巷道挖掘的目标长度后,然后通过数据储存单元获取巷道工程立体图,然后根据巷道挖掘的目标长度截取巷道工程立体图的同等长度并结合挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸构建巷道的挖护立体图;
15.此巷道的挖护立体图的横截面形状和尺寸会根据实际情况,由工作人员对其进行适应调整,从而更加适配挖掘的需要;
16.然后获取巷道的挖护立体图的曲形区域并构成曲形体积集合,同时获取曲形挖护巷道立体图的直线区域并构成直线体积集合;然后将曲形体积集合的曲形子集和直线体积集合的直形子集在巷道的挖护立体图分别用高亮显示和低亮显示;然后将高亮显示对应曲形体积集合的曲形子集,低亮显示对应直线体积集合的直形子集;
17.通过数据储存单元获取锚杆间距值和曲率常数,然后将巷道的挖护立体图按照锚杆间距值进行等距划分,当划分到曲形体积集合的曲形子集时,则获取曲形体积集合的曲形子集的曲率,并将此曲形子集的曲率与曲率常数相乘后除锚杆间距值后得到每个曲形子集的曲度间距值,然后每个曲形子集按照对应的曲度间距值从中部向两侧进行划分,当曲形子集与直形子集地相邻时,且按曲度间距的两侧或锚杆间距值划分过程中存在结余时,则自动将两者的结余值相加并在其平均值处进行划分,从而生成巷道的划分挖护立体图,然后获取巷道的划分挖护立体图中的划分线数量并与锚杆数量预设值进行相乘从而获得锚杆需求总量;
18.锚杆数量预设值为打入巷道内和其侧壁一环的总量,其为恒定值;
19.且将锚杆需求总量、巷道的划分挖护立体图发送给数据储存单元。
20.进一步,控制面板还设有复检校正单元,其中复检校正单元用于查看锚杆需求总量、巷道的划分挖护立体图并对其进行增减或不变操作,从而更新或不更新锚杆需求总量和巷道的划分挖护立体图中划分线数量及其对应锚杆数量。
21.进一步,挖护执行单元的具体工作过程如下:
22.获取数据储存单元内的巷道的划分挖护立体图后,立即控制超声波传感器打开并获取此时巷道未挖掘处的实时立体图,然后将巷道未挖掘处的实时立体图按与之对应的巷道的划分挖护立体图的最近10个划分体积进行截取并生成实时截取挖护立体图,且将实时截取挖护立体图转换成灰度立体图,然后通过数据储存单元获取灰度阈值、灰度预设值和警报阈值,将灰度立体图的灰度值以灰度阈值进行划分其体积并将其分别标定为低灰度区域、中灰度阈值和高灰度区;
23.且将若干低灰度区域的灰度与灰度预设值相减后对其区域进行二次标定并生成警报区域,且将获取多个警报区域的平均面积、平均间隙和数量并结合与之对应警报提示因子的修正常数计算获得巷道的警报提示因子,然后将巷道的警报提示因子与警报阈值进行比较,当巷道的警报提示因子大于警报阈值的最大值时,则生成警报预警信号,当生成警报预警信号立即编辑塌方预警语音提醒字符;当巷道的警报提示因子ja不大于警报阈值的最大值时,则生成执行控制信号;
24.立即获取最近1个划分体积并按低灰度区的体积从大到小排列并依次进行挖掘破碎排料的作业工作,同理,依次挖掘中灰度区和高灰度区域;当最近1个划分体积挖掘完成后,控制设备前景并进行并重复上述过程进行挖掘破碎排料作业,同时进行巷道内壁打孔、孔内安装锚杆并装配形成巷道支护的作业;
25.当无低灰度区域时,则直接生成执行控制信号,立即获取最近1个划分体积并按中灰度区的体积从大到小排列并依次进行挖掘破碎排料的作业工作,同理,然后依次挖掘高灰度区域;当最近1个划分体积挖掘完成后,控制设备前景并进行并重复上述过程进行挖掘破碎排料作业,同时进行巷道内壁打孔、孔内安装锚杆并装配形成巷道支护的作业。
26.综上所述,由于采用了上述技术方案,本发明的有益效果是:
27.本发明在实现井下或巷道掘护一体化提高工作人员安全的前提下,通过预输入单次作业的信息并对信息进行分析处理自动化生成可增加或不变的支护线(划分线)及其内的锚杆数量,从而生成巷道的划分挖护立体图,直接得到并准备对应锚杆数量,提高工作效率,然后在开挖支护前通过对准备开挖支护的巷道进行预采集其内信息并得到其薄弱区域位置(低灰度区域或中灰度区域),并对薄弱区域位置进行依次破碎挖掘作业,改变其支撑点,从而改变其应力,使其他区域挖掘更加简单,挖掘的速度更高,当挖掘完成后,在线及时地安装锚杆形成巷道支护并同步进行塌方预警工作,从而实现预处理和实时处理结合的自动化挖掘支护功能,使本发明自动化程度更高、智能性更强,提高工作效率;解决了传统掘进机与锚杆台车无法有机结合,两者在井下作业过程中间隙较大,存在塌方危险,安全隐患较大的问题,同时解决了传统设备无法对巷道进行预处理直接预获取单次作业的巷道锚杆需求量,无法提前预准备,造成效率较低,且无法通过预处理与实时处理有机结合,导致无法在线及时地安装锚杆形成巷道支护并同步进行塌方预警工作的问题。
附图说明
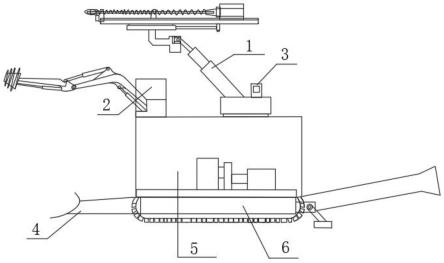
28.图1示出了本发明的主视图;
29.图2示出了本发明的主视结构细分图;
30.图3示出了钻锚装置的结构放大图;
31.图4示出了钻锚转盘装置内的结构图;
32.图5示出了本发明的流程图;
33.图例说明:1、钻锚装置;2、凿固体装置;3、控制面板;4、刮板输送装置;5、液压控制装置;6、驱动行走装置;101、液压多级伸缩杆;102、旋转装置;103、钻锚转盘装置;104、麻花钻杆;105、钻头;106、垫块;107、垫板;108、支撑架;109、转盘冲击头;110、转盘钻孔头;201、破碎截割头;202、液压机械臂;203、液压摇臂;401、铲板;402、机尾板;601、履带;602、防倾倒装置。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
35.实施例1:
36.如图1-5所示,一种适用于快速掘进易于移动智能锚杆台车,包括钻锚装置1、凿固体装置2、控制面板3、刮板输送装置4、液压控制装置5、驱动行走装置6和超声波传感器,钻锚装置1和凿固体装置2均安装于液压控制装置5的顶端,且液压控制装置5与钻锚装置1和凿固体装置2适配,液压控制装置5用于驱动凿固体装置2对一体化固态物进行破碎,其固态物通常为煤体或者岩石,然后通过液压控制装置5驱动钻锚装置1进行钻孔或打入锚杆,其中打入锚杆后对巷道围岩及时进行支护,保护工作人员安全健康,刮板输送装置4和驱动行走装置6设于液压控制装置5的底部,
37.刮板输送装置4的两侧对称安装有铲板401和机尾板402,铲板401用于铲取破碎的固态物,然后刮板输送装置4将铲板401上的破碎的固态物运至机尾板402处,从而将破碎的固态物运出,驱动行走装置6传动连接有履带601,履带601对称设有两个,且履带601处适配有防倾倒装置602,防倾倒装置602对称安装于驱动行走装置6的边线处,驱动行走装置6用于控制履带601圆周运动,从而控制本发明移动,防倾倒装置602还防止对巷道的地面接触到机尾板402,造成其碰坏,控制面板3与超声波传感器、液压控制装置5、刮板输送装置4、驱动行走装置6和防倾倒装置602电性连接;
38.钻锚装置1包括液压多级伸缩杆101,液压多级伸缩杆101的输出轴固定安装有旋转装置102,旋转装置102的输出轴固定安装有支撑架108,支撑架108的顶面固定设有垫板107,垫板107的顶面固定设有垫块106和钻锚转盘装置103,钻锚转盘装置103内传动设有转盘钻孔头110和转盘冲击头109,钻锚转盘装置103用于切换转盘钻孔头110和转盘冲击头109自由切换,转盘钻孔头110安装有麻花钻杆104和转盘冲击头109,麻花钻杆104的顶端固定安装有钻头105,且钻锚转盘装置103用于控制转盘钻孔头110旋转并带动麻花钻杆104旋转,驱动钻头105打孔,垫块106设于麻花钻杆104处,用于支撑麻花钻杆104,转盘冲击头109
39.内安装有锚杆,在打孔完成后,对孔内打入锚杆,打入锚杆后对巷道围岩及时进行支护;
40.凿固体装置2包括液压机械臂202,液压机械臂202安装于液压控制装置5上,且液压机械臂202与液压控制装置5传动连接,液压控制装置5用于控制液压机械臂202工作,液
压机械臂202的输出轴端安装有液压摇臂203,液压摇臂203的输出轴安装有破碎截割头201,液压控制装置5用于控制液压机械臂202和液压摇臂203工作,实现破碎截割头201的多方位调节和现破碎截割头201的旋转,从而实现多角度的未挖掘巷道的破碎工作;
41.控制面板3包括信息输入模块、数据储存单元、巷道分析单元和挖护执行单元;
42.工作原理:
43.步骤一,将本车手动控制或自动控制开设到巷道的未挖掘处,然后工作人员通过信息输入模块选择巷道挖掘的目标横截面形状,填入巷道挖掘的目标横截面尺寸和巷道挖掘的目标长度;
44.然后将挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸和巷道挖掘的目标长度发送到数据储存单元储存;其中挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸和巷道挖掘的目标长度构成巷道挖护需求信息;
45.步骤二,巷道分析单元通过数据储存单元获取到挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸和巷道挖掘的目标长度后,然后通过数据储存单元获取巷道工程立体图,然后根据巷道挖掘的目标长度截取巷道工程立体图的同等长度并结合挖掘的目标横截面形状、巷道挖掘的目标横截面尺寸构建巷道的挖护立体图;
46.此巷道的挖护立体图的横截面形状和尺寸会根据实际情况,由工作人员对其进行适应调整,从而更加适配挖掘的需要;
47.然后获取巷道的挖护立体图的曲形区域并构成曲形体积集合,同时获取曲形挖护巷道立体图的直线区域并构成直线体积集合;然后将曲形体积集合的曲形子集和直线体积集合的直形子集在巷道的挖护立体图分别用高亮显示和低亮显示;然后将高亮显示对应曲形体积集合的曲形子集,低亮显示对应直线体积集合的直形子集;
48.通过数据储存单元获取锚杆间距值和曲率常数,然后将巷道的挖护立体图按照锚杆间距值进行等距划分,当划分到曲形体积集合的曲形子集时,则获取曲形体积集合的曲形子集的曲率,并将此曲形子集的曲率与曲率常数相乘后除锚杆间距值后得到每个曲形子集的曲度间距值,然后每个曲形子集按照对应的曲度间距值从中部向两侧进行划分,当曲形子集与直形子集地相邻时,且按曲度间距的两侧或锚杆间距值划分过程中存在结余时,则自动将两者的结余值相加并在其平均值处进行划分,从而生成巷道的划分挖护立体图,然后获取巷道的划分挖护立体图中的划分线数量并与锚杆数量预设值进行相乘从而获得锚杆需求总量;
49.锚杆数量预设值为打入巷道内和其侧壁一环的总量,其为恒定值;
50.且将锚杆需求总量、巷道的划分挖护立体图发送给数据储存单元;
51.工作人员还通过复检校正单元查看锚杆需求总量、巷道的划分挖护立体图并对其进行增减或不变操作,从而更新或不更新锚杆需求总量和巷道的划分挖护立体图中划分线数量及其对应锚杆数量;
52.步骤三,挖护执行单元获取数据储存单元内的巷道的划分挖护立体图后,立即控制超声波传感器打开并获取此时巷道未挖掘处的实时立体图,然后将巷道未挖掘处的实时立体图按与之对应的巷道的划分挖护立体图的最近10个划分体积进行截取并生成实时截取挖护立体图,且将实时截取挖护立体图转换成灰度立体图,然后通过数据储存单元获取灰度阈值、灰度预设值和警报阈值,将灰度立体图的灰度值以灰度阈值进行划分其体积并
将其分别标定为低灰度区域、中灰度阈值和高灰度区,且将若干低灰度区域的灰度与灰度预设值相减后对其区域进行二次标定并生成警报区域,且将获取多个警报区域的平均面积、平均间隙和数量并将其标定为jm、jx和jil;其中两个警报区域的间隙为其最近边的间距;
53.然后依据公式ja=(k1*jm+k2*jx)*k3*jil,得到巷道的警报提示因子,然后将巷道的警报提示因子与警报阈值进行比较,当巷道的警报提示因子大于警报阈值的最大值时,则生成警报预警信号,当生成警报预警信号立即编辑“前方岩层空隙较多,挖护时存在塌方危险”的塌方预警语音提醒字符,然后自动或手动判断是否继续挖护巷道;
54.k1、k2、k3均为巷道的警报提示因子的修正常数,修正常数使计算的结果更加的接近真实值;警报区域的平均面积越大、平均间隙越接近和数量越多,则说明巷道内空隙越大,更加容易塌方;
55.当巷道的警报提示因子ja不大于警报阈值的最大值时,则生成执行控制信号;
56.立即获取最近1个划分体积并按低灰度区的体积从大到小排列并依次进行挖掘破碎排料的作业工作,同理,依次挖掘中灰度区和高灰度区域;当最近1个划分体积挖掘完成后,控制设备前景并进行并重复上述过程进行挖掘破碎排料作业,同时进行巷道内壁打孔、孔内安装锚杆并装配形成巷道支护的作业;
57.当无低灰度区域时,则直接生成执行控制信号,立即获取最近1个划分体积并按中灰度区的体积从大到小排列并依次进行挖掘破碎排料的作业工作,同理,然后依次挖掘高灰度区域;当最近1个划分体积挖掘完成后,控制设备前景并进行并重复上述过程进行挖掘破碎排料作业,同时进行巷道内壁打孔、孔内安装锚杆并装配形成巷道支护的作业;
58.综合上述技术方案;本发明在实现井下或巷道掘护一体化提高工作人员安全的前提下,通过预输入单次作业的信息并对信息进行分析处理自动化生成可增加或不变的支护线(划分线)及其内的锚杆数量,从而生成巷道的划分挖护立体图,直接得到并准备对应锚杆数量,提高工作效率,然后在开挖支护前通过对准备开挖支护的巷道进行预采集其内信息并得到其薄弱区域位置(低灰度区域或中灰度区域),并对薄弱区域位置进行依次破碎挖掘作业,改变其支撑点,从而改变其应力,使其他区域挖掘更加简单,挖掘的速度更高,当挖掘完成后,在线及时地安装锚杆形成巷道支护并同步进行塌方预警工作,从而实现预处理和实时处理结合的自动化挖掘支护功能,使本发明自动化程度更高、智能性更强,提高工作效率;解决了传统掘进机与锚杆台车无法有机结合,两者在井下作业过程中间隙较大,存在塌方危险,安全隐患较大的问题,同时解决了传统设备无法对巷道进行预处理直接预获取单次作业的巷道锚杆需求量,无法提前预准备,造成效率较低,且无法通过预处理与实时处理有机结合,导致无法在线及时地安装锚杆形成巷道支护并同步进行塌方预警工作的问题;其中,本发明广泛应用于井下或巷道作业,有效降低了工人的劳动强度,有利于矿井和巷道安全高效生产。
59.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1