一种旋转导向系统中导向短节磁工具面角测量方法及系统与流程
1.本发明涉及油田智能钻井技术领域,尤其涉及一种旋转导向系统中导向短节磁工具面角测量方法及系统。
背景技术:
2.旋转导向钻井系统是由地面和井下双向通信、控制设备控制钻头后(约80cm)三块肋板的不同作用力,来实现边钻井边调整方位和井斜,而肋板由电机控制液压系统发生作用。三块肋板按120度均匀安装在导向短节的外套上,外套与钻杆通过两组特殊轴承连接,钻井时,钻杆转动,外套基本不动,但在特殊地层时也会跟转,而外套的工具面角(360度上需要沿着钻进的面)决定造斜。因此,准确测量导向短节外套的工具面是研制旋转导向系统的前提。
3.工具面角分为磁工具面角和重力工具面角,垂直段磁工具面角精度高,水平段重力工具面角精度高,定向井钻井过程中两者缺一不可。导向短节主要为钢材料,对磁场测量的影响极大。多轴磁传感器在这种场合下无法正常工作,同时外套上供电、数据传输资源有限。现有技术中通过三轴磁传感器加光电定位的方法对导向短节磁工具面角进行测量,这种方法,一是没有考虑三轴磁传感器受钢铁材料的干扰,二是光电定位加工精度和安装要求高,输出数据非0即1,遇到安装不准确或振动等因素,可能造成漏码,影响测量精度。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的是提供一种旋转导向系统中导向短节磁工具面角测量方法及系统,通过霍尔传感器、磁铁配合无线随钻仪工具面角测量仪器进行测量,霍尔传感器对磁铁的测量是一个连续曲线,找到最大值即为磁铁最近的位置,不受其它因素的干扰,安装简单,无漏码,精度高。
5.为了实现上述目的,本发明是通过如下的技术方案来实现:
6.第一方面,本发明的实施例提供了一种旋转导向系统中导向短节磁工具面角测量方法,在导向短节外套内侧安装磁铁,在导向短节内芯外侧对应安装霍尔传感器和重力工具面角测量板;
7.旋转导向系统水平状态下,测量无线随钻仪的重力工具面角、导向短节内芯的重力工具面角,以及二者之间的角差;建立霍尔传感器的工具面角与无线随钻仪磁工具面角的关系;
8.旋转导向系统正常钻井状态下,将霍尔传感器两次测量到磁铁的最大值按时长等分,计算磁铁在导向短节外套的工具面角与霍尔传感器工具面角的差值;
9.建立磁铁在导向短节外套的磁工具面角与无线随钻仪磁工具面角的关系,以根据无线随钻仪的磁工具面角得到导向短节的磁工具面角。
10.作为进一步的实现方式,根据无线随钻仪的重力工具面角和磁工具面角相同,霍尔传感器的工具面角和导向短节内芯的重力工具面角为常数,建立无线随钻仪磁工具面角
和霍尔传感器工具面角的关系。
11.作为进一步的实现方式,钻井过程中,霍尔传感器每圈测量到一次磁铁,按照匀速钻井计算出不同时间点霍尔传感器与磁铁的角差,并通过无线随钻仪磁工具面角和霍尔传感器工具面角的关系,计算出导向短节的磁工具面角。
12.作为进一步的实现方式,将霍尔传感器测量到的两次最大值按时长等分成360的倍数。
13.作为进一步的实现方式,所述霍尔传感器与磁铁同心设置。
14.第二方面,本发明的实施例还提供了一种旋转导向系统中导向短节磁工具面角测量系统,包括无线随钻仪工具面角测量仪器、磁铁、霍尔传感器和重力工具面角测量板,无线随钻仪工具面角测量仪器安装于承压管内,用于测量无线随钻仪的磁工具面角和重力工具面角;
15.磁铁安装于导向短节外套内侧,导向短节内芯外侧安装霍尔传感器和重力工具面角测量板,通过霍尔传感器和重力工具面角测量板旋转测量到磁铁的间隔时间,计算磁铁在导向短节外套的磁工具面角与霍尔传感器工具面角的差值,以得到导向短节的磁工具面角。
16.作为进一步的实现方式,所述霍尔传感器与磁铁同心设置。
17.作为进一步的实现方式,还包括mcu,所述无线随钻仪工具面角测量仪器、霍尔传感器分别连接mcu。
18.作为进一步的实现方式,所述旋转导向系统配置无线随钻仪短节,无线随钻仪安装于无磁钻铤内。
19.作为进一步的实现方式,所述无磁钻铤一端与钻杆连接,另一端与导向短节相连;导向短节内芯同轴设于导向短节中,霍尔传感器和重力工具面角测量板固定于导向短节内芯外壁。
20.本发明的有益效果如下:
21.本发明钻井过程中,霍尔传感器每圈测量到一次磁铁,按照匀速钻井计算出不同时间点霍尔传感器与磁铁的角差,并通过无线随钻仪磁工具面角和霍尔传感器工具面角的关系,计算出导向短节的磁工具面角;霍尔传感器对磁铁的测量是一个连续曲线,找到最大值即为磁铁最近的位置,不受其它因素的干扰,安装简单,无漏码,精度高。
附图说明
22.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
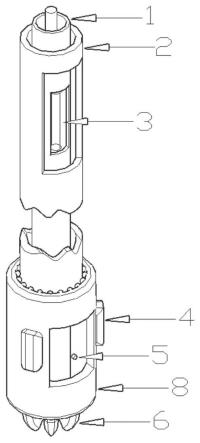
23.图1是本发明根据一个或多个实施方式的测量系统结构示意图;
24.图2是本发明根据一个或多个实施方式的导向短节剖面图。
25.其中,1、承压管;2、无磁钻铤;3、无线随钻仪工具面角测量仪器;4、肋板;5、磁铁;6、钻头;7、重力工具面角测量板;8、导向短节;9、导向短节内芯。
具体实施方式
26.实施例一:
27.本实施例提供了一种旋转导向系统中导向短节磁工具面角测量方法,旋转导向系统中配置无线随钻仪(mwd)短节,其主要作用是将井下数据编码后上传到地面,无线随钻仪(mwd)安装在不锈钢无磁钻铤2内,能够测量磁工具面角和重力工具面角。
28.如图1和图2所示,无线随钻仪工具面角测量仪器3安装在承压管1内,用于测量无线随钻仪的磁工具面角和重力工具面角;多根承压管1通过扶正器连接(无线随钻仪由多个短节组成)安装在无磁钻铤2内,无磁钻铤2一端与钻杆用丝扣连接,另一端与导向短节8用丝扣连接。
29.如图2所示,导向短节8的外套内侧安装磁铁5,导向短节内芯8外部安装重力工具面角测量板7,其中,霍尔传感器和重力工具面角测量器件(三轴加速度传感器)固定在一块板(重力工具面角测量板7)上,下井前重力工具面角测量器件在起到标定作用后可拆掉。霍尔传感器与磁铁5尽量同心安装。
30.仪器安装完成后(未与钻连接时),水平放置,就可通过mcu和测量软件,分别测出无线随钻仪(mwd)的重力工具面角和导向短节内芯9外部测量板安装点的重力工具面角,并计算出两者的角差(每次安装后角差不同);由于无线随钻仪(mwd)生产时标定重力工具面角和磁工具面角相同,霍尔传感器和和重力工具角测量板7两者之间固定角差,建立无线随钻仪(mwd)的磁工具面角和霍尔传感器的角差的关系式,即:角差=无线随钻仪工具面角
±
导向短节重力工具面角。
31.钻井过程中,将霍尔传感器和重力工具面角测量板7,每转一圈,就会测量到磁铁5一次,计算出测量到两次磁铁5的间隔时间,按时长等分成360的倍数(根据精度要求而定),即能计算出磁铁5在导向短节8外套的磁工具面角与霍尔传感器的工具面角的差值。
32.根据前述的角差关系式,建立磁铁5在导向短节8外套上磁工具面角与无线随钻仪(mwd)磁工具面角的关系,从而推算出导向短节8的磁工具面角。即,设t为上一圈的时长,t为最大值开始到当前的时长,此时,外套磁工具面角=霍尔传感器工具面角+t/t*360。
33.本实施例导向短节磁工具面角的测量,是借助于无线随钻仪(mwd)的重力工具面角和磁工具面角值,不能直接用无线随钻仪(mwd)的磁工具面角原因是:
34.一、无线随钻仪(mwd)测量钻杆的磁工具面角,导向短节测量是外套上的磁工具面角,两者之间通过轴承连接,角差值随机变化;导向短节为钢材料,多轴磁传感器由于导磁性材料干扰无法正常工作,只能采用别的方法。
35.二、正常钻井过程中,由于钻杆为丝扣连接,都为顺时针紧扣,因此,不会出现反转,所有旋转的都为有效弧度;正常钻井中,基本为匀速,测量时,先连续测量多圈,计算确定为匀速时,再作正式测量,并用多圈计算平均值确定磁工具面角。
36.本实施例霍尔传感器对磁铁5的测量是一个连续曲线,找到最大值即为磁铁5最近的位置,不受其它因素的干扰,安装简单,无漏码,精度高。
37.实施例二:
38.本实施例提供了一种旋转导向系统中导向短节磁工具面角测量系统,如图1和图2所示,包括无线随钻仪工具面角测量仪器3、磁铁5、霍尔传感器和重力工具面角测量板7,无线随钻仪工具面角测量仪器3安装于承压管1内,用于测量无线随钻仪的磁工具面角和重力工具面角。多根承压管1通过扶正器连接,无磁钻铤2一端与钻杆用丝扣连接,另一端与导向短节8用丝扣连接;钻杆末端安装钻头6。
39.磁铁5安装于导向短节8外套内侧,导向短节内芯9外侧安装霍尔传感器和重力工具面角测量板7;霍尔传感器与磁铁5同心设置。导向短节8外套轴向安装多个肋板4。
40.本实施例还包括mcu,无线随钻仪工具面角测量仪器3、霍尔传感器分别连接mcu。
41.本实施例通过测量无线随钻仪和导向短节内芯两个重力工具面角,并计算出两者之间的角差,又根据无线随钻仪(mwd)重力工具面角和磁工具面角相同,霍尔传感器的工具面角和导向短节内的重力工具面角为常数(固定角差),建立无线随钻仪磁工具面角和霍尔传感器工具面角的关系。霍尔传感器每圈测量到一次磁铁,按照匀速钻井计算出不同时间点霍尔传感器与磁铁的角差,并通过无线随钻仪磁工具面角和霍尔传感器工具面角的关系,计算出导向短节的磁工具面角。
42.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1