一种操作臂对准系统及立拱台车的制作方法
本发明涉及工程器械领域,具体而言,涉及一种操作臂对准系统及立拱台车。
背景技术:
1、目前的立拱台车通常采用两个臂夹持拱架,且其中一个臂装备工作平台以方便工人站在上面连接拱架;或采用多个臂架分别夹持多个拱架,根据工人指挥操作员调节臂架位置对拱架进行连接。
2、然而上述操作方式都需要多次操作臂架上升或者下降,每次对准需要考验操机手的经验和视力,操作极为不便,且对接难度大,施工效率低。
技术实现思路
1、本发明提供了一种操作臂对准系统及立拱台车,其能够实现拱架快速准确对接,提高施工效率。
2、本发明的实施例可以这样实现:
3、第一方面,本发明提供一种操作臂对准系统,包括以下步骤:
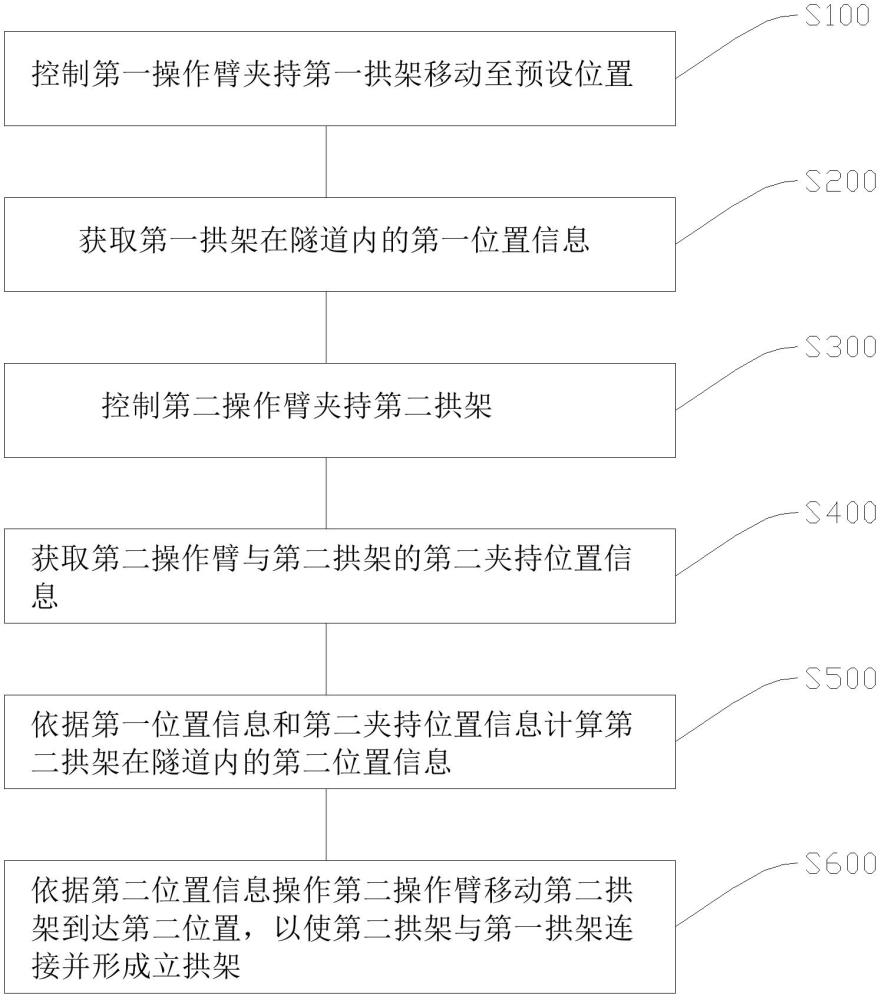
4、s100,控制第一操作臂夹持第一拱架移动至预设位置;
5、s200,获取所述第一拱架在隧道内的第一位置信息;
6、s300,控制第二操作臂夹持第二拱架;
7、s400,获取所述第二操作臂与所述第二拱架的第二夹持位置信息;
8、s500,依据所述第一位置信息和所述第二夹持位置信息计算所述第二拱架在所述隧道内的第二位置信息;
9、s600,依据所述第二位置信息操作所述第二操作臂移动所述第二拱架到达第二位置,以使所述第二拱架与所述第一拱架连接并形成立拱架。
10、在可选的实施方式中,所述第一拱架为中间拱架,所述第二拱架为侧拱架,且所述第二拱架的数量为两个,两个所述第二拱架分别设置于所述第一拱架的两侧。
11、在可选的实施方式中,所述立拱架还包括第三拱架,所述第一拱架和所述第三拱架均为侧拱架,所述第二拱架为中间拱架,所述第一拱架、所述第二拱架及所述第三拱架依次连接,所述步骤s600之后还包括:
12、s700,控制第三操作臂夹持所述第三拱架;
13、s800,获取所述第三操作臂与所述第三拱架的第三夹持位置信息;
14、s900,依据所述第二位置信息和所述第三夹持位置信息计算所述第三拱架在所述隧道内的第三位置信息;
15、s1000,依据所述第三位置信息操作所述第三操作臂移动所述第三拱架到达第三位置,以使所述第一拱架、所述第二拱架以及所述第三拱架依次连接并形成立拱架。
16、在可选的实施方式中,所述步骤s200包括:
17、s210,获取第一操作臂的状态信息,所述状态信息包括伸缩长度、俯仰角度以及偏转角度中的至少一种;
18、s220,获取所述第一操作臂与所述第一拱架的第一夹持位置信息;
19、s230,依据所述状态信息和所述第一夹持位置信息计算所述第一拱架在所述隧道内的第一位置信息。
20、在可选的实施方式中,所述步骤s220包括:
21、s221,获取第一夹持位置与所述第一拱架的两端的直线距离、水平距离以及竖直距离。
22、在可选的实施方式中,所述步骤s400包括:
23、s410,获取第二夹持位置与所述第二拱架的两端的直线距离,以表征所述第二夹持位置信息。
24、在可选的实施方式中,所述步骤s500包括:
25、s510,依据所述第一位置信息以及所述第二夹持位置信息计算所述第二拱架位于第二位置状态的情况下所述第二夹持位置与端部的水平距离和竖直距离,以表征所述第二位置信息。
26、在可选的实施方式中,所述步骤s600包括:
27、s610,依据所述第二位置信息设定所述第二操作臂的第一操控信息,所述第一操控信息包括所述第二操作臂的偏摆角度、伸缩长度及俯仰角度中的至少一种;
28、s620,以所述第一操控信息控制所述第二操作臂进行偏偏摆作、伸缩动作及俯仰动作中的至少一种,以带动所述第二拱架到达所述第二位置,并与所述第一拱架连接并形成立拱架。
29、在可选的实施方式中,所述步骤s220包括:
30、s222,获取所述第一夹持位置的高度信息,其计算公式为:
31、h200=h201+h202;
32、h202=l301×sin(α1);
33、其中,h200表征所述第一夹持位置的高度信息,h201为所述第一操作臂的夹具高度,h202为所述第一操作臂抬升高度,l301为所述第一操作臂的伸缩长度,α1为第一操作臂俯仰角度。
34、在可选的实施方式中,所述第二操作臂的第一偏摆角度的计算公式为:
35、β=arcsin(z/l103);
36、或,β=arccos(z/h102);
37、其中,β表征所述第二操作臂的第一偏摆角度;
38、z为所述第二拱架的端部与夹持部的直线距离;
39、l103表征所述第二拱架的夹持部在连接状态下与端部的水平距离;
40、h102表征所述第二拱架的夹持部在连接状态下与端部的竖直距离。
41、在可选的实施方式中,所述第二操作臂的第一伸缩长度的计算公式为:
42、l400=(l100-k101)×sin(β1);
43、l100=k100;
44、k100=k101+k102;
45、其中,l400表征所述第二操作臂的第一伸缩长度,l100为所述第一拱架的端部与夹持部的直线距离,k101、k102为台车尺寸参数。
46、在可选的实施方式中,所述第二操作臂的第一俯仰角度的计算公式为:
47、α2=arctan(h100/l302);
48、h100=h101+h102;
49、l302=l401-l303=((l100-k101)×sin(β1))/cos(β1)-l303;
50、l401=l400/cos(β1)=((l100-k101)×sin(β1))/cos(β1);
51、其中,α2表征所述第二操作臂的第一俯仰角度,h101表征所述第一拱架的端部与夹持部的竖直距离,h102表征所述第二拱架的夹持部在连接状态下与端部的竖直距离,l303表征所述第一操作臂的夹具长度。
52、在可选的实施方式中,所述步骤s800包括:
53、s810,获取第三夹持位置与所述第三拱架的两端的直线距离,以表征所述第三夹持位置信息。
54、在可选的实施方式中,所述步骤s900包括:
55、s910,依据所述第二位置信息以及所述第三夹持位置信息计算所述第三拱架位于第三位置状态的情况下所述第三夹持位置与端部的水平距离和竖直距离,以表征所述第三位置信息。
56、在可选的实施方式中,所述步骤s1000包括:
57、s1010,依据所述第三位置信息设定所述第三操作臂的第二操控信息,所述第二操控信息包括所述第三操作臂的偏摆角度、伸缩长度及俯仰角度中的至少一种;
58、s1020,以所述第二操控信息控制所述第三操作臂进行偏偏摆作、伸缩动作及俯仰动作中的至少一种,以带动所述第三拱架到达所述第三位置,并与所述第二拱架连接。
59、在可选的实施方式中,所述第三操作臂的第二偏摆角度的计算公式为:
60、β’=arcsin(z’/l103’);
61、或,β’=arccos(z’/h102’);
62、其中,β’表征所述第三操作臂的第二偏摆角度;z’为所述第三拱架的端部与夹持部的直线距离;
63、l103’表征在对接状态下所述第三夹持位置与端部的水平距离;
64、h102’表征在对接状态下所述第三夹持位置与端部的竖直距离。
65、在可选的实施方式中,所述第三操作臂的第二伸缩长度的计算公式为:
66、l400’=(l100’-k101’)×sin(β’);
67、l100’=k100’;
68、k100’=k101’+k102’;
69、其中,l400’表征所述第三操作臂的第二伸缩长度;l100’表征所述第二拱架的端部与夹持部的直线距离,k101’、k102’表征台车尺寸参数。
70、在可选的实施方式中,所述第二操作臂的第三俯仰角度的计算公式为:
71、α2’=arctan(h100’/l302’);
72、h100’=h101’+h102’;
73、l302’=l401’-l303’=((l100’-k101’)×sin(β’))/cos(β’)-l303’;
74、l401’=l400’/cos(β’)=((l100’-k101’)×sin(β’))/cos(β’);
75、其中,α2’表征所述第二操作臂的第三俯仰角度;h101’表征所述第二拱架的端部与夹持部的竖直距离,h102’表征所述第三拱架的夹持部在连接状态下与端部的竖直距离,l303’表征所述第二操作臂的夹具长度。
76、第二方面,本发明提供一种立拱台车,包括车体、第一操作臂、第二操作臂、传感器及控制器,所述第一操作臂和所述第二操作臂均设置于所述车体,所述传感器设置于所述第一操作臂和所述第二操作臂,所述第一操作臂和所述第二操作臂均与所述控制器连接,所述控制器用于实施如前述实施方式任一项所述的操作臂对准系统。
77、本发明实施例提供的操作臂对准系统及立拱台车的有益效果包括:在第一操作臂将第一拱架移动至预设位置后,获取位于第一拱架位于预设位置的第一位置信息,控制第二操作臂夹持第二拱架后,获取第二夹持位置信息,即可通过获取的第一位置信息和第二夹持位置信息快速且准确地控制第二操作臂将第二拱架移动至目标位置并与第一拱架对接,因此在保证安全施工的前提下,对接精准且迅速,显著节省了施工时间,并提高了施工效率。
- 还没有人留言评论。精彩留言会获得点赞!