一种集成灶及风机系统、控制方法与流程
本公开涉及集成灶,尤其涉及一种集成灶及风机系统、控制方法。
背景技术:
1、集成灶是一种集吸油烟机、燃气灶、消毒柜、储藏柜等多种功能于一体的厨房电器。目前的集成灶产品存在的问题之一在于,集成灶的风机系统的电机振动噪声会通过风道结构聚拢,并从进气口定向传播出来,从而影响用户的烹饪体验。
技术实现思路
1、为了解决上述提出的至少一个技术问题,本公开提出了一种集成灶及风道系统、控制方法。
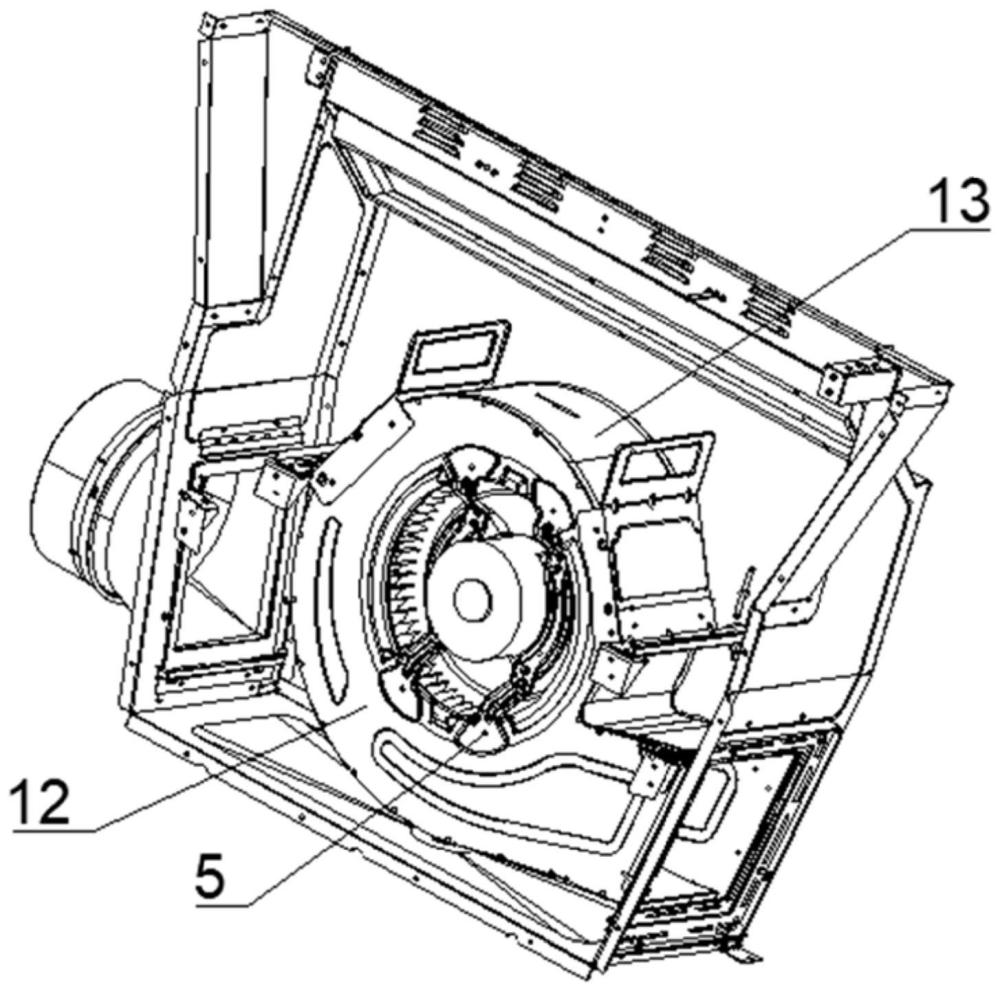
2、根据本公开的一些实施例中,提供了一种风机系统,设置于集成灶的风道结构内,所述风机系统包括:蜗壳,通过安装支架与所述风道结构连接;电机,通过电机支架与所述蜗壳连接,所述电机与所述电机支架之间设有间隙;叶轮,安装在所述电机的输出轴上;测距模块,设置在所述风道结构内,用于检测所述电机与所述电机支架的间隙距离;振动检测模块,设置在所述电机支架上,用于检测所述电机的振动信号;噪声检测模块,设置在所述风道结构内,用于检测所述风道结构内的噪声信号;控制模块,分别与所述测距模块、所述振动检测模块、所述噪声检测模块和所述电机通过电信号连接,所述控制模块接收所述测距模块、所述振动检测模块和所述噪声检测模块的检测结果,并控制所述电机的转速。
3、基于上述方案,风机系统能够根据电机的振动信号跟风道结构的噪声信号,判断电机结构以及风道结构是否存在异音风险,并实时调节电机的转速,可以降低电机与电机支架在使用过程中结构间隙的改变导致的振动噪声。
4、在一些可能的实施方式中,所述噪声检测模块分别设置在所述风道结构的进口和所述蜗壳上,所述蜗壳包括前盖、后盖和环壁,所述安装支架设置在所述环壁上,所述前盖靠近所述蜗壳的出口的位置、所述后盖靠近所述蜗壳的出口的位置以及所述安装支架与所述风道结构的连接处分别设置有所述噪声检测模块。
5、基于上述方案,可以准确地检测风道结构的进口和出口的噪声音量,从而得到风道结构中噪声的传递辐射水平。
6、根据本公开的另一些实施例中,提供了一种集成灶,包括风道结构,所述集成灶还包括上述一些实施例中任意一项所述的一种风机结构,所述风机系统设置于所述风道结构内。
7、根据本公开的另一些实施例中,提供了一种风机系统控制方法,应用于上述一些实施例中任意一项所述的一种风机结构中,所述方法包括:在所述风机系统中的电机与电机支架的间隙满足预设要求的情况下,对电机在至少三个不同频率下的振动值进行采样,得到实际振动数据;建立所述实际振动数据与所述电机在对应采样频率下的初始振动数据之间的第一匹配关系;建立所述实际振动数据与所述风机系统所在的风道结构的实际检测到的噪声数据之间的第二匹配关系;建立所述噪声数据与所述风道结构的振动传递数据之间的第三匹配关系,所述振动传递数据指示所述电机振动传递对应的噪声;根据所述第一匹配关系、所述第二匹配关系和所述第三匹配关系,确定所述风道结构的异音风险状态;根据所述异音风险状态,确定所述电机的转速。
8、基于上述方案,采用递进式的排查方式,分别从电机振动程度、噪音传递衰减程度以及局部振动致噪辐射程度确定异音风险状态,精准控制电机的转速,避免用户感知噪声过大,从而提供良好的使用体验。
9、在一些可能的实施方式中,所述第一匹配关系包括,在每个采样频率下,所述实际振动数据与所述初始振动数据的偏差值是否超过预设误差。
10、基于上述方案,通过电机振动数据相对于初始振动数据的偏差程度,可以确定电机运行状态以及电机与电机支架的结构状态。
11、在一些可能的实施方式中,所述风道结构的进口处、所述蜗壳的前盖、所述蜗壳的后盖以及所述蜗壳的安装支架与所述风道结构的连接处分别设置有噪声检测模块;所述建立所述实际振动数据与所述风机系统所在的风道结构的实际检测到的噪声数据之间的第二匹配关系,包括:对所述噪声数据按照从大至小排序;获取所述风道结构的进口的噪声信号,提取进口噪声峰值数据,将所述进口噪声峰值数据按照从大至小排序,提取进口噪声峰值数据的数量与所述噪声数据的数量一致;在提取的所述噪声峰值数据的频率与所述噪声数据的频率一一对应的情况下,根据所述风道结构的进口的噪声信号,提取风道进口噪声总值;获取所述蜗壳的噪声信号,提取风道结构内的风道噪声总值;确定所述第二匹配关系,所述第二匹配关系包括,所述风道噪声总值与所述风道进口噪声总值的大小关系。
12、基于上述方案,通过对比实际振动数据和噪声数据,可以得到风道结构的结构异音情况,也能够确定电机振动噪声在风道结构的传播过程中的衰减情况。
13、在一些可能的实施方式中,所述建立所述噪声数据与所述风道结构的振动传递数据之间的第三匹配关系,包括:获取蜗壳的振动传递函数;根据所述振动传递函数以及提取的所述噪声峰值数据的频率,确定所述蜗壳的最大振动致噪位置;根据所述最大振动致噪位置,确定所述蜗壳对所述风道结构的振动噪声辐射值;确定所述第三匹配关系,所述第三匹配关系包括,所述振动噪声辐射值与预设最大辐射阈值的大小关系。
14、基于上述方案,根据蜗壳不同位置的振动致噪水平确定蜗壳的最大振动致噪位置,可以避免因个别数据误差导致的异音风险检测不灵敏的情况,从而降低局部振动致噪辐射产生的异音风险。
15、在一些可能的实施方式中,所述根据所述最大振动致噪位置,确定所述蜗壳对所述风道结构的振动噪声辐射值,包括:获取所述最大振动致噪位置的振动致噪系数;获取所述最大振动致噪位置的振动加速度幅值;所述振动噪声辐射值为所述振动致噪系数与所述振动加速度幅值的乘积。
16、基于上述方案,可以准确得到蜗壳上振动致噪影响最大的区域位置点对风道内总噪声的声音辐射量。
17、在一些可能的实施方式中,所述根据所述第一匹配关系、所述第二匹配关系和所述第三匹配关系,确定所述风道结构的异音风险状态,包括:在所述实际振动数据与所述初始振动数据的偏差值不超过预设误差的情况下,无异音风险;在所述实际振动数据与所述初始振动数据的偏差值超过预设误差,且所述风道噪声总值小于所述风道进口噪声总值的情况下,无异音风险;在所述实际振动数据与所述初始振动数据的偏差值超过预设误差,且所述风道噪声总值大于等于所述风道进口噪声总值,且所述振动噪声辐射值小于所述预设最大辐射阈值的情况下,无异音风险;在所述实际振动数据与所述初始振动数据的偏差值超过预设误差,且所述风道噪声总值大于等于所述风道进口噪声总值,且所述振动噪声辐射值大于等于所述预设最大辐射阈值的情况下,有异音风险。
18、基于上述方案,第一匹配关系、第二匹配关系和第三匹配关系的不同组合对应不同的集成灶运行状态,通过递进式条件筛选,能够准确检测到异音风险状态,从而提高电机转速控制的精度。
19、在一些可能的实施方式中,所述方法还包括:在所述提取的所述噪声峰值数据的频率与所述噪声数据的频率不一一对应的情况下,若所述噪声峰值数据小于所述预设最大辐射阈值,无异音风险;若所述噪声峰值数据大于等于所述预设最大辐射阈值,有异音风险。
20、基于上述方案,补充其他情形下的异音风险状态判断条件,进一步提高电机转速控制的精度。
21、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开。
22、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!