一种无人机起落架收放作动筒微型双输入减速器的制作方法
1.本实用新型属于机械技术领域,具体涉及一种无人机起落架收放作动筒微型双输入减速器。
背景技术:
2.减速装置是飞机起落架收放作动筒的重要组成部分,电机通电旋转,经减速装置减速增扭后驱动螺旋副伸缩,实现起落架收放功能。为了提高可靠性,飞行器对各配套机电伺服系统都提出了余度设计要求,而无人机起落架收放作动筒采用多电机输入代替单电机输入也成为一种发展趋势。
3.现有起落架收放作动筒减速装置多为单电机输入,多级直齿传动,这种结构的减速装置体积、重量都比较大,无法实现电气余度要求。
技术实现要素:
4.实用新型目的
5.本实用新型提供一种无人机起落架收放作动筒微型双输入减速器,满足余度设计要求,提高可靠性、实现大变比,减小体积,降低重量。
6.实用新型技术解决方案
7.无人机起落架收放作动筒接通机上电源供电,根据飞管计算机放/收指令,作动筒的驱动控制电路接通电机及电磁制动器线圈相应极性供电,通电后电磁制动器松开制动摩擦片,电机根据供电的极性进行正转/反转,经减速装置减速增扭驱动输出轴进行相对应的伸出/缩回动作。
8.一种无人机起落架收放作动筒微型双输入减速器,包括依次传动连接的一级差动行星轮系、二级行星轮系、三级行星轮系、直齿传动副;驱动电机一m1、驱动电机二m2分别带动一级差动行星轮系的两个中心轮旋转形成双输入。
9.优选的,一级差动行星轮系包括中心轮一1、中心轮二2、行星轮一c1,转臂x1及齿圈b;齿圈b具有外齿3和内齿b1;中心轮一1、中心轮二2分别固定安装在驱动电机一m1、驱动电机二m2的轴上;行星轮一c1活套在转臂一 x1的轴上;中心轮一1与行星轮一c1啮合,中心轮二2与齿圈b的外齿3啮合;行星轮一c1又同时与齿圈b的内齿b1啮合。中心轮一1、中心轮二2及齿圈b 为三个可动外接构件,给定其中2个构件的运动后,其余构件的运动才能确定。
10.优选的,二级行星轮系包括中心轮三a1,行星轮二c2、内齿圈b2和转臂二 x2;中心轮三a1位于转臂x1的输出端并与行星轮二c2啮合;行星轮二c2同时与内齿圈b2啮合;行星轮二c2活套在转臂二x2的轴上,自转的同时绕中心轮三a1公转。
11.优选的,三级行星轮系包括中心轮四a2,行星轮三c3和转臂三x3;中心轮四a2位于转臂三x2的输出端并与行星轮三c3啮合;行星轮三c3同时与内齿圈 b2啮合;行星轮三c3活套在转臂三x3的轴上,自转的同时绕中心轮四a2公转。
12.优选的,直齿传动副包括驱动轮4和输出轮5;驱动轮4通过花键与转臂三x3联结,
并与输出轮5啮合。
13.优选的,驱动电机一m1、驱动电机二m2均带有制动器。
14.优选的,中心轮1、中心轮二2分别用销钉固定安装在驱动电机一m1和 m2轴上
15.优选的,该减速器工作时能得到如下输出结果:
16.(1)驱动电机一m1通电,制动器断开,电机轴旋转带动中心轮一1运转;驱动电机二m2断电停转,制动器抱死,中心轮二2不转,即齿圈b固定时,该减速器的变比为:
[0017][0018]
式中,z
b1
为齿圈b的内齿b1齿数,z1为中心轮一1的齿数,z
b2
为内齿圈 b2的齿数,z
a1
为中心轮三a1的齿数,z
a2
为中心轮四a2的齿数,z4为驱动轮4 的齿数,z5为输出轮5的齿数;
[0019]
(2)驱动电机二m2通电,制动器断开,电机轴旋转带动中心轮二2运转;驱动电机一m1停转,即中心轮一1固定时,该减速器的变比为:
[0020][0021]
式中,z3为齿圈b的外齿3的齿数。
[0022]
(3)驱动电机一m1、驱动电机二m2均运转,且使得中心轮一1与内齿b1的转向相同时,即驱动电机一m1、驱动电机二m2转向相反,该减速器输出的转速为:
[0023]
n=n
m1
/i1+n
m2
/i2=(n
m1
+n
m2
)/i1[0024]
式中,n
m1
为驱动电机一m1的转速,n
m2
为驱动电机二m2的转速,i1=i2。
[0025]
本实用新型的优点
[0026]
本实用新型的优点在于:
[0027]
(1)提出微型双输入减速装置结构,满足余度设计要求;
[0028]
(2)采用差动行星轮系和多级行星轮系的组合实现大变比;
[0029]
(3)通过强度降额设计计算及软件仿真满足小体积,低重量要求;
[0030]
(4)可单电机驱动和双电机同时驱动,提高了可靠性。
附图说明
[0031]
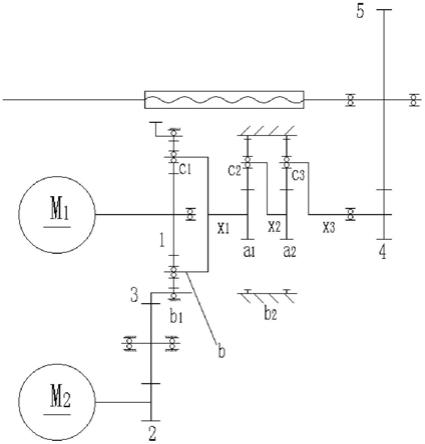
图1为本实用新型的一种无人机起落架收放作动筒微型双输入减速器的结构示意图。
[0032]
图中:m1驱动电机一、m2驱动电机二、1中心轮一、2中心轮二、c1行星轮一,x1转臂一、b齿圈、3齿圈b外齿、b1齿圈b内齿、a1中心轮三,c2行星轮二、b2内齿圈、x2转臂二、a2中心轮四、c3行星轮三、x3转臂三。
具体实施方式
[0033]
下面具体说明本实用新型的技术方案。
[0034]
一种无人机起落架收放作动筒微型双输入减速器,包括依次传动连接的一级差动行星轮系、二级行星轮系、三级行星轮系、直齿传动副;驱动电机一m1、驱动电机二m2分别带动一级差动行星轮系的两个中心轮旋转形成双输入。
[0035]
本实施例中,一级差动行星轮系包括中心轮一1、中心轮二2、行星轮一 c1,转臂x1
及齿圈b;齿圈b具有外齿3和内齿b1;中心轮一1、中心轮二2 分别通过销钉固定安装在驱动电机一m1、驱动电机二m2的轴上;行星轮一c1活套在转臂一x1的轴上;中心轮一1与行星轮一c1啮合,中心轮二2与齿圈b 的外齿3啮合;行星轮一c1又同时与齿圈b的内齿b1啮合。中心轮一1、中心轮二2及齿圈b为三个可动外接构件,给定其中2个构件的运动后,其余构件的运动才能确定。
[0036]
二级行星轮系包括中心轮三a1,行星轮二c2、内齿圈b2和转臂二x2;中心轮三a1位于转臂x1的输出端并与行星轮c2啮合,本实施例中中心轮三a1直接加工在转臂x1的输出端;行星轮二c2同时与内齿圈b2啮合;行星轮二c2活套在转臂二x2的轴上,自转的同时绕中心轮a1公转。
[0037]
三级行星轮系包括中心轮四a2,行星轮三c3和转臂三x3;中心轮四a2位于转臂三x2的输出端并与行星轮三c3啮合,本实施例中中心轮四a2直接加工在转臂三x2的输出端;行星轮三c3同时与内齿圈b2啮合;行星轮三c3活套在转臂三x3的轴上,自转的同时绕中心轮四a2公转。
[0038]
直齿传动副包括驱动轮4和输出轮5;驱动轮4通过花键与转臂三x3联结,并与输出轮5啮合,输出轮5直接加工在丝杆的端部。
[0039]
驱动电机一m1、驱动电机二m2均带有制动器。
[0040]
中心轮1、中心轮二2分别用固定安装在驱动电机一m1和m2轴上
[0041]
该减速器工作时能得到如下输出结果:
[0042]
(1)驱动电机一m1通电,制动器断开,电机轴旋转带动中心轮一1运转;驱动电机二m2断电停转,制动器抱死,中心轮二2不转,即齿圈b固定时,该减速器的变比为:
[0043][0044]
式中,z
b1
为齿圈b的内齿b1齿数,z1为中心轮一1的齿数,z
b2
为内齿圈 b2的齿数,z
a1
为中心轮三a1的齿数,z
a2
为中心轮四a2的齿数,z4为驱动轮4 的齿数,z5为输出轮5的齿数;
[0045]
(2)驱动电机二m2通电,制动器断开,电机轴旋转带动中心轮二2运转;驱动电机一m1停转,即中心轮一1固定时,该减速器的变比为:
[0046][0047]
式中,z3为齿圈b的外齿3的齿数。
[0048]
(3)驱动电机一m1、驱动电机二m2均运转,且使得中心轮一1与内齿b1的转向相同时,即驱动电机一m1、驱动电机二m2转向相反,该减速器输出的转速为:
[0049]
n=n
m1
/i1+n
m2
/i2=(n
m1
+n
m2
)/i1[0050]
式中,n
m1
为驱动电机一m1的转速,n
m2
为驱动电机二m2的转速,i1=i2。
[0051]
本实用新型不局限于所述实施方式,任何人应得知在本实用新型的启示下作出的结构变化,凡是与本实用新型具有相同或相近的技术方案,均落入本实用新型的保护范围之内。本实用新型未详细描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1