一种适合应用于多场景的两轴自稳云台的制作方法
1.本发明涉及智能装备领域、嵌入式开发领域、防疫消杀领域,是一种搭载在自动驾驶机器人上可实现多自由度旋转的智能云台。
背景技术:
2.随着嵌入式技术,智能装备技术的迭代更新,设备的生产制造更贴近智能化,数字化、人性化。例如,清扫刷安装在清扫车上可实现机械式清洁作业,红外检测枪安装在机器人上可实现移动端体温监测,弥雾机安装在智能车上可实现区域性消杀工作,摄像机安装在无人机上可用于航拍。这些智能装置与机器人,智能车的结合更加明确的阐述了它们应用的工作领域,但是经调查发现这些执行部件大多是机械式固定锁紧,无法像人手臂一样伸展转动,这使得作业期间需要人力干预,降低了工作效率。本文针对上述问题设计发明了一种可实现多自由度转动的智能云台,它可挂载弥雾机、大型摄像装置、高压水枪等设备。通过远程操控技术实现产品的优化升级,为解决问题提供优选方案。
3.申请公布号为cn111120824a的发明专利申请,公开了一种智能云台,实现了两自由度的平移和旋转功能,但它的平移距离仅限在升降支架上的竖直位移,无法实现执行端变角度俯仰作业。申请公布号为cn211203374u的实用新型专利申请,公开了一种组合云台,其断电后也可以保证摄像机实现机械式俯仰动作,减轻了拍摄者的负担。申请公布号为cn108488566a的发明专利申请,公开了一种具备语音控制功能的智能云台,可实现三轴自稳,在它的主控板上设有语音输入模块,通过语音指令即可实现相关控制。
4.上述专利存在的不足:1.上述智能云台主要挂载设备都是摄像机,手机等电子设备,实际应用场景有限;2.上述三轴自稳智能云台结构复杂,精密度高,加工成本高,不适合在公共场所推广普及;3.上述智能云台所搭载的任务载荷小。
技术实现要素:
5.本发明的目的在于,设计出一种两轴自稳云台,以解决执行端无法转动、载荷小、成本高、结构复杂的问题。
6.本发明所解决的技术问题采用以下技术方案来实现:所述的一种适合应用于多场景的两轴自稳云台,根据任务载荷外形及大小需求,设计出两种款式:一种是悬挂式两轴自稳云台,另一种是半嵌入式两轴自稳云台。所述的悬挂式两轴自稳云台的任务载荷是通过锁固组件悬挂式连接在俯仰电机室上的;所述的半嵌入式两轴自稳云台指任务载荷是半嵌入在锁固组件上的。
7.所述的悬挂式两轴自稳云台整体包括:电机室、电机支架、转向电机、俯仰电机、转向轴、转动轴承、弯臂、锁固组件、信号接收器,所述电机室分为转向电机室和俯仰电机室,它们的功能如下:所述转向电机室和俯仰电机室分别是转向电机和俯仰电机的安装部位。
8.进一步的,所述转向电机室充当了悬挂式两轴自稳云台的基座,转向电机室上板四周有螺纹孔,通过螺丝螺母固定在智能车和机器人外壳上。
9.进一步的,所述俯仰电机室是悬挂式两轴自稳云台任务载荷的安装位置,在俯仰电机室外部通过锁固组件将任务载荷与云台连接在一起。
10.进一步的,所述转向电机选取减速电机,通过转向电机输出轴转动实现悬挂式两轴自稳云台的左右摆动;所述俯仰电机选取减速电机,通过俯仰电机机身的转动带动俯仰电机室转动,从而实现任务载荷的俯仰运动。
11.进一步的,所述电机支架是一个刚性连接件,将转向电机和俯仰电机通过螺栓螺母固定在电机室内部。
12.进一步的,所述转向轴是一个空心管,悬挂式两轴自稳云台内部的一个转向轴穿过转动轴承内环嵌套连接着所述转动电机和弯臂下端,另一个转向轴穿过转动轴承内环嵌套连接着俯仰电机和弯臂上端。
13.进一步的,所述转动轴承既是连接部件也是减阻部件,悬挂式两轴自稳云台内部一个转动轴承的基座与所述转动电机室通过螺栓螺母连接,另一个转动轴承的基座与所述俯仰电机室通过螺栓螺母连接。
14.进一步的,所述弯臂是悬挂式两轴自稳云台的主要承载部件,也是所述转动电机和俯仰电机的连接部件,其为满足载荷需求,弯臂采用铝合金做主要材料,加强了部件本身的强度和刚度。
15.进一步的,所述弯臂内部是信号接收器的安装部位,也是俯仰电机信号线和电源线的安置部位,将信号线和电源线内置避免了悬挂式两轴自稳云台转向时受到约束,实现了360
°
的俯仰运动和旋转运动。
16.进一步的,所述信号接收器是通过接受远程端发布的2g、2.5g、4g、5g信号指令,将信号传输到执行端,控制转向电机和俯仰电机工作。
17.所述的半嵌入式两轴自稳云台整体包括五个部分:电机、云台基座、弯臂、信号接收器、锁固组件,所述电机又分为转向电机和俯仰电机,转向电机可控制自稳云台左右转动,俯仰电机可控制任务载荷实现上下摆动,这两种电机类型都选用减速电机。
18.进一步的,所述云台基座是半嵌入式两轴自稳云台与移动端连接的部件,也是所述转向电机的固定位置。云台基座与智能车或者机器人端通过螺栓螺母连接,所述转向电机嵌套在云台基座内,也是通过螺栓螺母紧固连接。
19.进一步的,所述弯臂是半嵌入式两轴自稳云台的主要承载部件,它整体呈“l”型。弯臂下端与所述转动电机的输出轴连接。
20.进一步的,所述锁固组件是所述俯仰电机的安装部位,也是任务载荷的连接端,俯仰电机机身是嵌套在锁固组件里边的,通过机身的转动带动任务载荷上下摆动。
附图说明
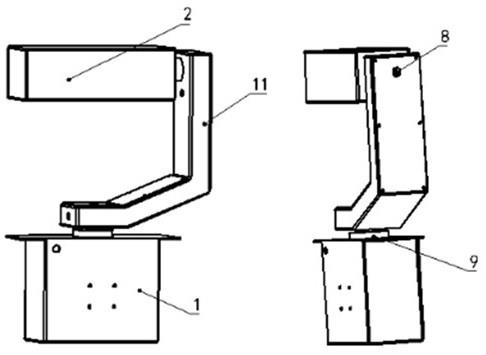
21.图1.为本发明提供的悬挂式两轴自稳云台正视图及后视图。
22.图2.为本发明提供的悬挂式两轴自稳云台正等侧视图。
23.图3.为本发明提供的悬挂式两轴自稳云台实际应用案例的双风筒喷洒装置正等侧视图。
24.图4.为本发明提供的半嵌入式两轴自稳云台正视图及仰视图。
25.图5.为本发明提供的半嵌入式两轴自稳云台正等测视图。
26.图6.为本发明提供的单风筒喷洒装置侧视图及后视图。
27.图7.为本发明提供的风筒喷洒装置正等测视图。
具体实施方式
28.下面将悬挂式两轴自稳云台和半嵌入式两轴自稳云台结合附图及实施例对本发明作进一步的详细说明。
29.所述的悬挂式两轴自稳云台整体包括:电机室、电机支架、转向电机3、俯仰电机4、转向轴、转动轴承、弯臂11、锁固组件13、信号接收器。
30.所述的电机室包括转动电机室1和俯仰电机室2,电机室是所述转动电机1、俯仰电机2、电机支架、转向轴、转动轴承的安装部位。
31.在日常作业中,电机室不仅起到了保护电机的作用,转向电机室1还充当了所述悬挂式两轴自稳云台的基座,它上盖有4个螺纹孔,通过螺丝螺母固定在智能车和机器人壳体上;俯仰电机室2还是任务载荷的挂载部位,在俯仰电机室2外部有通孔和卡扣,通过锁固组件13将任务载荷与云台连接在一起。
32.所述电机分为转动电机3和俯仰电机4,电机类型都选取减速电机,所述的减速电机转速较慢,但是扭矩较大,满足了任务载荷的需求。
33.电机外壳通过电机支架固定在电机室上,转向电机室1固定在移动设备上,使转向电机室1、转向电机3、移动设备组成了一个刚性体,转向电机3的输出轴没有被约束,所以转向电机3通过输出轴转动实现悬挂式两轴自稳云台的左右转动。
34.所述俯仰电机4的输出轴通过转向轴8固定在弯臂11上部。任务载荷的俯仰运动是通过俯仰电机4的旋转带动俯仰电机室2转动实现的。
35.所述电机支架是一个刚性连接件,所述的悬挂式两轴自稳云台内部有两个地方用到了电机支架。电机支架5将转动电机3通过螺栓螺母固定在所述转动电机室1内部,电机支架6将俯仰电机4通过螺栓螺母固定在所述俯仰电机室2内部。
36.所述转向轴是一个空心管,所述悬挂式两轴自稳云台内部有两个地方用到了转向轴。转向轴7穿过转动轴承9内环嵌套连接着所述转动电机和弯臂下端,转向轴8穿过转动轴承10内环嵌套连接着俯仰电机和弯臂上端。
37.所述转动轴承既是连接部件也是减阻部件,转动轴承9的基座与所述的转动电机室1通过螺栓螺母连接,转向轴7穿过转动轴承9内环将转动电机3的输出轴和弯臂11底端嵌套连接。转动电机3工作时,由其输出轴带动弯臂11实现左右转动。
38.转动轴承10的基座与所述的俯仰电机室2通过螺栓螺母连接,转向轴8穿过转动轴承10内环将俯仰电机4输出轴和弯臂11上端嵌套连接。俯仰电机4输出轴固定,其机身转动带动俯仰电机室2转动,从而带动任务载荷实现俯仰转动。
39.所述弯臂11是悬挂式两轴自稳云台的主要承载部件,也是转动电机1和俯仰电机2的连接部件。为满足载荷需求,弯臂11采用铝合金做主要材料,加强了部件本身的强度和刚度。
40.所述弯臂11内部是所述信号接收器的安装部位,也是俯仰电机4信号线和电源线的安置部位。将信号线和电源线内置避免了弯臂11转向时受到约束,可实现360
°
的俯仰运动和旋转运动。
41.所述锁固组件13是悬挂式两轴自稳云台与任务载荷的连接部件,根据任务载荷的形状、尺寸、质量需求,通过3d打印或定制加工出合适的锁紧零件。
42.所述信号接收器是通过接受远程端发布的2g、2.5g、4g、5g信号指令,将信号传输到执行端,控制转向电机3和俯仰电机4工作。
43.所述的半嵌入式两轴自稳云台整体包括:电机、云台基座3、弯臂4、信号接收器、锁固组件5。
44.所述电机又分为转向电机1和俯仰电机2,这两种电机类型都选用减速电机,目的是在作业时,在小转速情况下给任务载荷提供更大的扭矩。
45.所述转向电机1可控制自稳云台左右转动,所述俯仰电机2可控制任务载荷实现上下摆动。
46.所述云台基座3是所述半嵌入式两轴自稳云台与移动端的连接部件,也是所述转向电机1的固定位置。云台基座3四周有螺纹通孔与移动端通过螺栓螺母连接,转向电机1嵌套在云台基座3内,也是通过螺栓螺母紧固连接。
47.所述弯臂4是半嵌入式两轴自稳云台的主要承载部件,它整体呈“l”型。弯臂4下端与所述转动电机3的输出轴连接。
48.所述弯臂4内部是所述信号接收器的安装部位,也是俯仰电机2信号线和电源线的安置部位。
49.所述锁固组件5是所述俯仰电机2的安装部位,也是任务载荷的连接端。俯仰电机2机身是嵌套在锁固组件5里边的,通过机身的旋转带动任务载荷上下摆动。
50.阐述悬挂式两轴自稳云台的实际应用案例: 智能喷洒装置工作前,先将远程端的遥控器或者手柄打开,然后依次打开悬挂式两轴自稳云台开关,水泵开关,送风机开关,操作手中控制云台的摇杆,向上推动摇杆,俯仰电机4反转,带动俯仰电机室2向上转动,俯仰电机室2下方固定了两个弥雾机风筒12,从而带动弥雾机风筒12向上摆动;操作手中控制云台的摇杆,向下推动摇杆,俯仰电机4正转,带动俯仰电机室2向下转动,从而带动弥雾机风筒12向下摆动,俯仰电机2的正反转实现了弥雾机风筒12的上下摆动;操作手中控制云台的摇杆,向左推动摇杆,转动电机3正转,带动弯臂11向左转动,从而带动弥雾机风筒12向左摆头;操作手中控制云台的摇杆,向右推动摇杆,转动电机3反转,带动弯臂11向右转动,从而带动弥雾机风筒12向右摆头。一个摇杆就可以远程控制弥雾机实现上下左右多方位的喷洒作业。
51.最后应当说明的是:本发明的应用不会只限于上述的举例,对智能装备领域,软件控制领域的技术人员来说,可以根据上述说明加以改进和优化,所有这些改进和优化都应该属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1