一种磁悬浮万向稳定平台
1.本发明涉及一种航天器及大气层内飞行器通用的非接触磁悬浮万向稳定平台,其动子系统通过电磁力悬浮,能够有效地隔离飞行器本体产生的振动,动子系统载荷承接件可以搭载需要甚稳超静工作条件的载荷,由于控制动子系统三自由度平动的纯电磁平动磁轴承、控制两自由度偏转的洛伦兹力磁轴承、控制周向无旋的洛伦兹力磁轴承都是球面结构,动子系统能够实现三自由度平动悬浮、万向偏转及周向无旋控制。
技术背景
2.航天器在轨运行过程中,受到宇宙空间环境中的多种扰动的影响产生振动,造成姿态的变化,对于航天器搭载的需要甚稳超静工作环境的载荷而言,振动的影响无法忽略,类似地,大气层内飞行器由于要考虑气动力和重力影响,情况更加复杂,利用磁悬浮技术使载荷非接触悬浮可以有效隔绝飞行器产生的振动,提高载荷的姿态指向精度。
3.磁悬浮技术现在地面上的主要应用在磁悬浮列车上,其次在航空乃至航天领域都有着广阔的应用前景,航天上应用的磁悬浮飞轮、磁悬浮控制力矩陀螺都是采用磁悬浮技术对转子进行控制,对于可以提供甚稳超静环境的磁悬浮惯性稳定平台的研究还比较有限。
4.磁悬浮惯性稳定平台一般具有多自由度悬浮控制、隔振和姿态稳定控制等多项功能,授权专利zl201210321861.0所述的一种五自由度主动磁悬浮惯性稳定平台具备两自由度平动、三自由度旋转主动控制能力,但其设计功能为航空遥感领域隔振,进一步用于航天领域还需要对结构和材料等进行优化。授权专利zl202010295521.x所述的一种洛伦兹惯性稳定平台采用球面洛伦兹力磁轴承实现了大角度偏转,但其稳定精度仍有待提升。上述的两款磁悬浮惯性稳定平台均具有进一步优化空间,投入航天领域实用还需进一步升级改造。
5.经分析表明,提高磁悬浮平台指向精度的前提是,平台轴向平动控制和径向平动控制都对径向转动控制没有干扰,即在x、y和z三个方向的平动必须与径向x和y方向转动完全解耦,这就要求磁轴承产生径向和轴向电磁力时,不会对悬浮平台产生偏转力矩。
技术实现要素:
6.本发明的技术解决问题是:克服现有技术的不足,提供了一种多种飞行器通用的非接触磁悬浮万向稳定平台,能够实现动子系统的超稳超静控制,隔离振动,提出了一种新的轴向、径向三自由度平动悬浮控制可解耦的斜装三正交平动磁轴承设计,动子系统能够进行万向偏转,增大了载荷承接件搭载的载荷工作的带宽。
7.本发明的技术解决方案为:一种磁悬浮万向稳定平台,主要由定子系统和动子系统两部分组成,其特征在于:定子系统主要包括:平动偏转磁轴承连接盘、周向磁轴承定子安装盘、周向磁轴承定子、偏转磁轴承定子、平动磁轴承定子、平动磁轴承安装盘、传感器;动子系统主要包括:载荷承接件、周向磁轴承动子、偏转磁轴承内侧动子、偏转磁轴承外侧
动子、动子骨架;磁悬浮动子系统和磁悬浮定子系统之间通过周向磁轴承、偏转磁轴承、平动磁轴承实现非机械接触的稳定悬浮,平动磁轴承定子位于动子骨架下方,由平动磁轴承内侧定子和平动磁轴承外侧定子成对组成,三对定子周向120
°
均布排列,每对内外定子磁极中心连线穿过球心,三轴成斜装三正交结构排布,定子通过紧固螺钉安装在底部的平动磁轴承安装盘上,周向磁轴承定子安装盘位于内侧平动磁轴承定子上方,通过紧固螺钉连接,周向磁轴承定子安装盘具有120
°
均布的三组支架,三组传感器安装于安装盘的三组支架上,周向磁轴承定子的三个绕组成120
°
均布排列于安装盘没有支架的方向,平动偏转磁轴承连接盘位于周向磁轴承定子安装盘支架上方,通过紧固螺钉连接,连接盘存在内外两组接口,外侧接口下方连接偏转磁轴承定子,偏转磁轴承内外动子位于动子骨架洛伦兹力磁轴承房内,内外两部分分布于偏转磁轴承定子径向两侧,动子骨架位于周向磁轴承定子安装盘径向外侧,三组动子磁爪位于舱体下方,成120
°
均布于平动磁轴承各组定子之间,周向磁轴承动子位于动子骨架径向内侧、磁爪上方,包绕于周向磁轴承定子径向两侧,载荷承接件位于动子骨架上方,通过紧固螺栓连接。
8.所述的平动磁轴承、偏转磁轴承、周向磁轴承均采用球面结构,通过全球面结构和全通道主动控制,能够实现万向稳定平台动子系统的万向偏转。所述的平动磁轴承定子磁极、动子磁爪均为1j22或其他高饱和磁密导磁材料。所述的永磁体为衫钴合金或钕铁硼合金材料。所述的洛伦兹力定子骨架采用高强度、高硬度聚酰亚胺材料。
9.所述的动子骨架为中空,动子骨架上端连接的载荷承接件可以连接载荷,下端的磁爪为内外球面结构,配合球面平动磁轴承进行动子系统的轴向、径向平动控制,洛伦兹力磁轴承房中放置有偏转洛伦兹力磁轴承永磁体,内外永磁体之间的导磁环间为球形空气球壳,洛伦兹力磁轴承定子骨架绕组放置在球形空气球壳内。
10.上述方案的原理是:使用磁轴承让动子系统悬浮,不与定子系统及飞行器本体产生机械接触,平动磁轴承采用纯电磁磁轴承结构,磁极采用球面结构,通过差动控制实现动子系统的径向、轴向平动悬浮控制,偏转磁轴承采用洛伦兹力磁轴承控制,其绕组在聚酰亚胺定子骨架上周向90
°
均匀分布,其磁场通过永磁体提供。如图1所示,本发明的偏转洛伦兹力永磁磁路为:磁通从外上永磁体的n极出发,通过内上导磁环,内外洛伦兹力永磁体之间的球形空气球壳,外上导磁环,回到内上永磁体s极,经过永磁体和内柱面导磁环回到内下永磁体s极,经过内下导磁环,内外洛伦兹力永磁体之间的球形空气球壳,外下导磁环回到外下永磁体s极,再经过外柱面导磁环和外上永磁体回到外上永磁体n极形成闭合回路。如图2b所示,本发明的周向洛伦兹力永磁磁路为,磁通从周向左永磁体的n极出发,通过周向外球面导磁环,内外球面导磁环之间的球形空气球壳,周向内球面导磁环,内外球面导磁环之间的空气球壳,回到周向右永磁体的s极,再经过周向外导磁环和周向左永磁体回到周向左永磁体的n极形成闭合回路。如图5b所示,本发明的平动磁轴承纯电磁磁路为:磁通从外侧/内侧平动磁轴承定子左球面磁极的n极出发,经过定子与动子磁爪之间的气隙,然后经过磁爪,经磁爪和定子右球面磁极之间的气隙回到定子右球面磁极的s极,经定子形成闭合回路。
11.上述方案的原理是:使用磁轴承让动子系统悬浮,不与定子系统及飞行器本体发生机械接触,通过全球面结构实现万向偏转。控制动子系统径向轴向平动的平动磁轴承采用球面结构,能够实现消除干扰力矩的目的,通过平动磁轴承周向120
°
均布斜装三正交结
构实现轴向和径向两自由度三方向平动所需控制力解耦到三组磁极方向,创新性地将径向轴向磁轴承结合;控制偏转和周向稳定的洛伦兹力定子和永磁体都是采用球面结构,能够实现动子系统径向万向偏转和周向无旋稳定。
12.上述方案的原理是:使用磁轴承让动子系统悬浮,不与定子系统及飞行器本体发生机械接触,能够有效隔离飞行器产生的振动,给载荷承接件上搭载的载荷提供甚稳超静的工作条件。
13.本发明与现有技术相比的优点在于:本发明在现有磁悬浮技术的基础上将径向轴向磁轴承结合,通过周向120
°
均布斜装三正交结构实现径向轴向三自由度控制力解耦到磁极方向,取代传统的将所需控制力解耦到径向两自由度及周向一自由度,三自由度平动悬浮分两个磁轴承控制的设计,大大降低了控制难度,有效地提高了控制精度;偏转、周向磁轴承均采用球面洛伦兹力磁轴承,三组平动磁极及其磁爪也采用球面结构,本发明通过全球面磁悬浮和全通道主动控制实现了动子系统的万向偏转和精确指向,大幅提升了稳定平台的敏捷性、稳定性和精确性。
附图说明
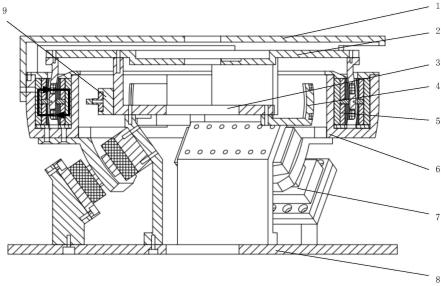
14.图1为本发明技术解决方案的一种磁悬浮万向稳定平台前视剖面图;
15.图2a为本发明技术解决方案的周向磁轴承的前视剖面图;
16.图2b为本发明技术解决方案的周向磁轴承上视剖面图;
17.图3为本发明技术解决方案的偏转磁轴承前视剖面图;
18.图4为本发明技术解决方案的动子骨架前视剖面图;
19.图5a为本发明技术解决方案的平动磁轴承前视剖面图;
20.图5b为本发明技术解决方案的平动磁极剖面图;
具体实施方案
21.如图1所示,一种磁悬浮万向稳定平台,主要由定子系统和动子系统两部分组成,其特征在于:定子系统主要包括:平动偏转磁轴承连接盘(2)、周向磁轴承定子安装盘(3)、周向磁轴承(4)定子、偏转磁轴承(5)定子、平动磁轴承定子(7)、平动磁轴承安装盘(8)、传感器(9);动子系统主要包括:载荷承接件(1)、周向磁轴承(4)动子、偏转磁轴承(5)内侧动子、偏转磁轴承(5)外侧动子、动子骨架(6);磁悬浮动子系统和磁悬浮定子系统之间通过周向磁轴承(4)、偏转磁轴承(5)、平动磁轴承(7)实现非机械接触的稳定悬浮,平动磁轴承(7)定子位于动子骨架(6)下方,由平动磁轴承(7)内侧定子和平动磁轴承(7)外侧定子成对组成,三对定子周向120
°
均布排列,每对内外定子磁极中心连线穿过球心,三轴成斜装三正交结构排布,定子通过紧固螺钉安装在底部的平动磁轴承安装盘(8)上,周向磁轴承定子安装盘(3)位于内侧平动磁轴承(7)定子上方,通过紧固螺钉连接,周向磁轴承定子安装盘具有120
°
均布的三组支架,三组传感器(9)安装于安装盘(3)的三组支架上,周向磁轴承(4)定子的三个绕组成120
°
均布排列于安装盘(3)没有支架的方向,平动偏转磁轴承连接盘(2)位于周向磁轴承定子安装盘(3)支架上方,通过紧固螺钉连接,连接盘(2)存在内外两组接口,外侧接口下方连接偏转磁轴承(5)定子,偏转磁轴承(5)内外动子位于动子骨架(6)洛伦兹力磁轴承房内,内外两部分分布于偏转磁轴承(5)定子径向两侧,动子骨架(6)位于周向磁轴
承定子安装盘(3)径向外侧,三组动子磁爪位于舱体下方,成120
°
均布于平动磁轴承(7)各组定子之间,周向磁轴承(4)动子位于动子骨架(6)径向内侧、磁爪上方,包绕于周向磁轴承(4)定子径向两侧,载荷承接件(1)位于动子骨架(6)上方,通过紧固螺栓连接。
22.图2a为本发明中的周向磁轴承(4)前视剖面图,图2b为周向磁轴承上视剖面图,周向磁轴承(4)为洛伦兹力磁轴承,包括静止部分和悬浮部分,静止部分主要包括:周向磁轴承定子线圈支架(402)、周向磁轴承绕组(403),悬浮部分主要包括:周向磁轴承动子支架(401)、周向内球面导磁环(404)、周向外球面导磁环(405)、周向永磁体(406)、周向外导磁环(407),周向磁轴承绕组(403)通过环氧树脂胶接于周向磁轴承定子线圈支架(402)上,组成周向磁轴承(4)定子,于周向磁轴承定子安装盘(3)上120
°
均布排列,周向磁轴承动子支架(401)制有三个包绕舱,成120
°
均布排列,周向内球面导磁环(404)嵌于包绕舱内侧表面,周向外球面导磁环(405)、周向永磁体(406)、周向外导磁环(407)成同心配合嵌于包绕舱外侧空腔,两侧包绕周向磁轴承定子线圈,悬浮其上。
23.图3为本发明中的偏转磁轴承(5)前视剖面图,偏转磁轴承(5)为洛伦兹力磁轴承,包括静止部分和悬浮部分,静止部分主要包括:偏转磁轴承定子骨架(501)、偏转磁轴承绕组(506),悬浮部分主要包括:内导磁环(502)、内上永磁体(503a)、内下永磁体(503b)、内上球面导磁环(504a)、内下球面导磁环(504b)、内隔磁环(505)、外导磁环(507)、外上永磁体(508a)、外下永磁体(508b)、外上球面导磁环(509a)、外下球面导磁环(509b)、外隔磁环(510),偏转磁轴承绕组(506)通过环氧树脂胶接于偏转磁轴承定子骨架(501)上,内导磁环(502)、内隔磁环(505)同心装配,内上永磁体(503a)、内上球面导磁环(504a)、内下永磁体(503b)、内下球面导磁环(504b)同心对称装配于内隔磁环(505)上下,组成偏转磁轴承(5)内侧动子,外导磁环(507)、外隔磁环(510)同心装配,外上永磁体(508a)、外上球面导磁环(509a)、内下永磁体(508b)、外下球面导磁环(509b)同心对称装配于外隔磁环(510)上下,组成偏转磁轴承(5)外侧动子。
24.图4为本发明中的动子骨架(6)前视剖面图,动子骨架(6)主要包括动子骨架基体(601)、动子磁爪(602)、偏转磁轴承外侧动子锁紧环(603)、偏转磁轴承内侧动子锁紧环(604),动子磁爪(602)位于动子骨架基体(601)下方,成120
°
均布排列,通过紧固螺钉连接。
25.图5a为本发明中的平动磁轴承(7)前视剖面图,图5b为本发明中的平动磁极剖面图,平动磁轴承(7)为纯电磁磁轴承,包括静止部分和悬浮部分,静止部分主要包括:平动磁轴承外侧磁极支架(701)、平动磁轴承外侧磁极(702)、平动磁轴承外侧绕组(703)、平动磁轴承内侧磁极(704)、平动磁轴承内侧绕组(705)、平动磁轴承内侧磁极支架(706),悬浮部分主要包括:动子磁爪(602),平动磁轴承内侧磁极(704)装于平动磁轴承内侧磁极支架(706)上,绕有平动磁轴承内侧绕组(705),组成平动磁轴承(7)内侧定子,三组平动磁轴承内侧定子成120
°
均布,平动磁轴承外侧磁极(702)装于平动磁轴承外侧磁极支架(701)上,绕有平动磁轴承外侧绕组(703),组成平动磁轴承(7)外侧定子,三组平动磁轴承外侧定子成120
°
均布,与平动磁轴承内侧定子相对,磁极面均为球面,磁极中心连线交于球心,成斜装三正交结构,动子磁爪(602)悬浮于内外磁极球面之间,成同心关系。
26.本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1