一种快换型机器人磁压式堵漏工具、机器人及方法
1.本发明涉及机器人技术领域,特别涉及一种快换型机器人磁压式堵漏工具、机器人及方法。
背景技术:
2.盛放或输送水、油、气、酸、碱、弱酸、盐等各类介质的管道和罐体长时间使用后,表面会出现点状、线状的泄漏,为了不影响生产活动,常采用磁压式堵漏工具进行现场堵漏。
3.现有磁压式堵漏工具,例如申请号为201120099501.1的一件中国实用新型专利,公开了一种消防用磁压式堵漏装置。磁压式堵漏工具利用强永磁体对钢铁容器的吸附力,通过操纵手柄控制工作面上的磁通量,吸住泄漏的有磁金属表面,达到工具和泄漏本体之间的压合和释放。设置仿形压片,是在垫在磁压堵漏器本体与泄漏口之间的薄板,用它可弥补二者之间的空隙,减小磁阻,改善堵漏胶的分布状态。
4.但当大型储备油罐、气罐、水罐的泄漏时,需由两人配合进行操作堵漏,一人用绳索从上方利用吊环吊传递给另一个,在半空中进行堵漏操作,完成后上方的吊送人可收回绳索,具有一定的危险性;另外,在一些恶劣环境中,工作人员面临着无法进入或靠近的状况,则无法使用该工具进行及时的堵漏。
技术实现要素:
5.本发明的目的是提供一种快换型机器人磁压式堵漏工具、机器人及方法,以解决现有技术中的磁压式堵漏工具需人工操作的问题。为了实现上述目的,本发明通过如下的技术方案来解决:
6.第一方面,本发明提供了一种快换型机器人磁压式堵漏工具,包括:
7.磁压式堵漏工具本体,其外伸出一转轴,通过转动所述转轴以控制工作面上的磁通量;
8.快换接头,安装在所述磁压式堵漏工具本体,用于与机器人快换连接或分离;
9.电机,其输出轴连接有联轴器,通过所述联轴器与所述转轴连接,所述电机设有抱闸。
10.作为进一步的技术方案,所述快换接头设置在所述磁压式堵漏工具本体工作面的相对侧。
11.作为进一步的技术方案,所述联轴器通过圆柱销与所述转轴连接,所述转轴与所述圆柱销具有轴向上的间隙,所述转轴与所述联轴器具有径向上的间隙。
12.作为进一步的技术方案,所述电机配置有减速器,所述电机通过减速器输出轴与所述联轴器连接。
13.作为进一步的技术方案,所述减速器输出轴配置有角度传感器。
14.作为进一步的技术方案,所述减速器输出轴与所述联轴器键连接。
15.作为进一步的技术方案,还包括数传电台和电机控制器,所述数传电台用于将接
收的远程控制信号传输至所述电机控制器。
16.作为进一步的技术方案,还包括工控盒,所述数传电台和所述电机控制器放置在所述工控盒内。
17.第二方面,本发明提供了一种机器人,配置有如第一方面所述的快换型机器人磁压式堵漏工具。
18.第三方面,本发明提供了根据如第一方面所述快换型机器人磁压式堵漏工具的堵漏方法,包括以下步骤:
19.需要堵漏时,机器人通过快换接头对接磁压式堵漏工具本体,运动至堵漏点位置并把磁压式堵漏工具本体对准泄漏点,控制电机转动,当角度到达设定值时电机停止转动,磁压式堵漏工具本体吸附在管道或罐体上,完成堵漏,抱闸工作;需要取下堵漏工具时,电机反转,磁吸消失,通过机器人取下磁压式堵漏工具本体。
20.上述本发明的有益效果如下:
21.(1)本发明通过快换接头可将磁压式堵漏工具本体与机器人快换连接或松开,通过机器人将磁压式堵漏工具本体携带至堵漏点,实现了自动化的堵漏,更适配一些特殊的堵漏场合。机器人与磁压式堵漏工具本体分离后可做其他工作,不影响机器人的正常工作。在不需要堵漏时,通过机器人可以将磁压式堵漏工具本体取下。
22.(2)本发明通过设置电机,可通过其的驱动,转轴转动控制工作面上的磁通量实现磁压式堵漏工具本体的自动加磁或卸磁,进而实现磁压式堵漏工具本体的自动堵漏或取下。
23.(3)本发明转轴与圆柱销具有轴向上的间隙,转轴与联轴器具有径向上的间隙。通过设置间隙可以缓冲磁压式堵漏工具本体内磁铁翻转产生的冲击,保证磁压式堵漏工具本体正常稳定工作。
附图说明
24.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的限定。还应当理解,这些附图是为了简化和清楚而示出的,并且不一定按比例绘制。现在将通过使用附图以附加的特征和细节来描述和解释本发明,其中:
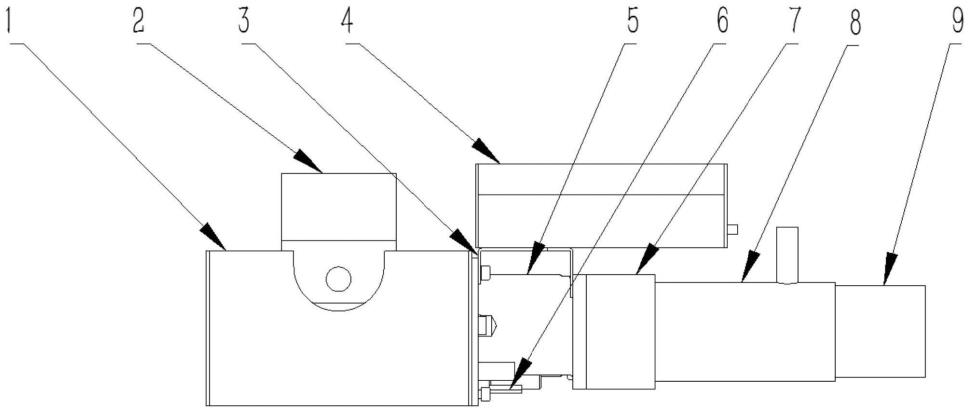
25.图1示出了本发明实施例中磁压式堵漏工具主视示意图;
26.图2示出了本发明实施例中磁压式堵漏工具剖视图(竖直方向);
27.图3示出了图2中a处局部放大示意图;
28.图4示出了本发明实施例中磁压式堵漏工具另一剖面图(水平方向);
29.图5示出了图4中b处局部放大示意图;
30.图6示出了本发明实施例中磁压式堵漏工具控制示意图。
31.图中:1、磁压式堵漏工具本体;2、快换接头;3、安装架;4、工控盒;5、减速器连接件;6、联轴器;7、减速器;8、电机;9、抱闸;10、圆柱销;11、间隙;12、角度传感器;13、键;14、安装板;15、转轴;16、减速器输出轴。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明典型实施例中的技术方案进行清楚、完整地描述。
33.实施例1
34.如图1至图5所示,本实施例提供了一种快换型机器人磁压式堵漏工具,包括:
35.磁压式堵漏工具本体1,其外伸出一转轴15,通过转动转轴15以控制工作面上的磁通量;
36.快换接头2,安装在磁压式堵漏工具本体1,用于与机器人快换连接或分离;
37.电机8,其输出轴连接有联轴器6,通过联轴器6与转轴15连接,电机8设有抱闸9。
38.磁压式堵漏工具本体1采用申请号为201120099501.1专利中的结构即可,不同的是,去掉了手柄,仅保留了控制工作面上的磁通量的转轴,即本技术中的转轴15。
39.通过快换接头2可将磁压式堵漏工具本体1与机器人快换连接或分离,通过机器人将磁压式堵漏工具本体1携带至堵漏点,实现了自动化的堵漏,更适配一些特殊的堵漏场合。机器人与磁压式堵漏工具本体1分离后可做其他工作,不影响机器人的正常工作。在不需要堵漏时,通过机器人可以将磁压式堵漏工具本体1取下。
40.本实施例中的机器人种类可根据工作的场合进行选择。
41.通过设置电机8,可通过其的驱动,转轴15转动控制工作面上的磁通量实现磁压式堵漏工具本体1的自动加磁或卸磁,进而实现磁压式堵漏工具本体1的自动堵漏或取下。
42.如图1所示,电机8配置有抱闸9,抱闸9能够保证磁压式堵漏工具本体1稳定的吸附在管道或罐体上。
43.电机8配置有减速器7,电机8通过减速器输出轴16与联轴器6连接。减速器7通过减速器连接件5与磁压式堵漏工具本体1连接,两者的连接方式为可拆卸连接。
44.还包括工控盒4,数传电台和电机控制器放置在工控盒4内。工控盒4通过安装架3安装在减速器连接件5上,数传电台用于将接收的远程控制信号传输至电机控制器,电机控制器控制电机8的启停。不难理解的是,远程需要设置控制器,控制器同样配置一台数传电台,其将指令远程发送给电机控制器配置的数传电台。通过数传电台的无线传输,实现远程控制磁压式堵漏工具本体1的自动加磁或卸磁。
45.快换接头2设置在磁压式堵漏工具本体1工作面的相对侧,有利于磁压式堵漏工具本体1的堵漏工作。
46.如图1所示,本实施例中,快换接头2通过销与磁压式堵漏工具本体1连接。
47.如图2和图3所示,联轴器6通过圆柱销10与转轴15连接,转轴15与圆柱销10具有轴向上的间隙11,转轴15与联轴器6具有径向上的间隙11。通过设置间隙可以缓冲磁压式堵漏工具本体1内磁铁翻转产生的冲击,保证磁压式堵漏工具本体1正常稳定工作。
48.减速器输出轴16与联轴器6通过键13连接。之后联轴器6通过圆柱销10与转轴15连接。
49.如图4和图5所示,减速器输出轴16配置有角度传感器12。角度传感器12通过安装板14安装在减速器连接件5上,通过角度传感器12可以监测转轴15所转动的角度。
50.实施例2
51.本实施例提供了一种机器人,配置有如实施例1中的快换型机器人磁压式堵漏工
具。
52.实施例3
53.本实施例提供了根据如实施例1中快换型机器人磁压式堵漏工具的堵漏方法,包括以下步骤:
54.需要堵漏时,机器人通过快换接头2对接磁压式堵漏工具本体1,运动至堵漏点位置并把磁压式堵漏工具本体1对准泄漏点,通过数传电台控制电机控制器启动电机8转动,角度传感器12反馈信号经过信号变送器转换为485信号,再通过数传电台传送到控制器,形成闭环,如图6所示。当角度到达设定值时电机8停止转动,磁压式堵漏工具本体1吸附在管道或罐体上,完成堵漏,抱闸9工作;需要取下堵漏工具时,电机8反转,磁吸消失,通过机器人取下磁压式堵漏工具本体1。
55.需要说明的是,磁压式堵漏工具吸附在管道或罐体上完成堵漏后,机器人可松开快换接头,去做其他工作。当需要取下磁压式堵漏工具时,机器人重新对接快换接头。
56.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1