一种移动式安全监控装置的制作方法
1.本发明属于监控设备技术领域,尤其涉及一种移动式安全监控装置。
背景技术:
2.在工业生产中,为了达到安全生产的条件,通常需要对涉及安全生产的各项要素进行安全监控,监控的要素包括但不限于气体的泄漏情况、管道及设备的破损情况、特定位置的温湿度噪声情况等,通过对前述要素进行定期安全巡检,得到安全监控数据,进而对工业生产过程的安全系数进行评价,及时发现安全隐患并进行排查,这是实现安全生产的关键。
3.现有技术中通常采用人工巡检的方式对生产场景中的多个关键位置进行安全监视,或者通过在特定位置安装监控摄像头以及各类传感器进行监视。然而,前述人工巡检的方式由于人为的疲劳和懈怠等问题而可靠性较差,固定位置方式安装摄像头和各类传感器进行监控的方式存在监控的盲区(包括摄像头盲区、传感器盲区),无法得到全面的监控信息,因而现有的监控方式无法准确、全面、有效地获取监控数据,导致对生产场景的安全评价信息存在偏差而无法得到准确的安全评价结论。因此,需要开发设计一种不依赖人工的、能够及时准确且全面地获取监控信息的安全监控装置,以解决前述技术问题。
技术实现要素:
4.本发明为解决公知技术中存在的技术问题而提供一种结构设计合理、不依赖人工、能够及时准确且全面地获取监控信息的移动式安全监控装置。
5.本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种移动式安全监控装置包括带有车轮的底盘,在底盘上安装有控制箱和底座箱,在控制箱的顶部设有支撑面板,在支撑面板上安装有传感器装载盘且在传感器装载盘上装载有多个传感器组件;在底座箱的顶部安装有回转底座以及驱动回转底座转动的回转电机,在回转底座上安装有一级支座,在一级支座的上端铰接安装有一级支臂并安装有驱动一级支臂的一级俯仰电机,在一级支臂的上端铰接安装有二级支座并安装有驱动二级支座的二级俯仰电机,在二级支座的上端铰接安装有二级支臂并安装有驱动二级支臂的摇摆电机,在二级支臂的前端铰接安装有三级支臂并安装有驱动三级支臂的摆角电机,在三级支臂的端部安装有接头组件,传感器组件与接头组件插接连接,还包括转接端子和信号收发器,接头组件通过导联线与转接端子连接,信号收发器与转接端子插接连接。
6.优选地:在二级支座的中部设有横向贯通的通孔,转接端子安装固定在所述通孔内,信号收发器的前部插入所述通孔内并与转接端子连接。
7.优选地:信号收发器包括外壳,在外壳的前部设有插接颈管,在插接颈管的前端安装有与转接端子连接的插接端子;在外壳内安装有处理器模块以及与处理器模块连接的模数转换模块、无线通信模块和电源模块,在外壳上还安装有与电源模块连接的充电接线端子;在外壳的底部安装有手柄,手柄与二级支座可拆卸连接。
8.优选地:在三级支臂的前端设有套管,接头组件包括采用压圈压持固定在所述套管内的端子外套,在端子外套内安装有连接端子,连接端子与转接端子通过所述导联线连接。
9.优选地:传感器组件包括位于中部的环形凸台,在环形凸台的一侧设有后部套管、另一侧设有前部套管,在后部套管内安装有与连接端子插接的传感器端子,在前部套管的端部安装有传感器,传感器通过内线缆与传感器端子连接。
10.优选地:传感器装载盘包括安装在支撑面板底部的轴座以及安装在轴座侧部的驱动电机,安装在驱动电机的输出轴上的主动轮与安装在轴座内的转轴下端的从动轮采用皮带传动,在转轴的上端安装有转盘,在转盘的外缘安装有多个周向等角度间隔的传感器座,在每个传感器座上还安装有对传感器组件进行锁止固定的锁止器。
11.优选地:传感器座采用螺钉安装固定在转盘的外缘,在传感器座上设有供传感器组件的前部套管插入的、上下贯通的通孔,在前部套管的侧壁上设有环形销槽,锁止器为电推杆且安装在传感器座的内侧,在传感器座的侧壁上设有供电推杆的活动端穿入的销孔,电推杆的活动端嵌入环形销槽内对传感器组件进行锁止固定。
12.优选地:在支撑面板的底部安装有装载盘驱动箱,装载盘驱动箱将传感器装载盘的位于支撑面板下方的组件封闭在内部。
13.优选地:在底盘的前部中间位置安装有前循迹传感器,在装载盘驱动箱的底部中间位置安装有后循迹传感器;在底盘的中部安装有二维码阅读器。
14.本发明的优点和积极效果是:
15.本发明提供了一种结构设计合理的移动式安全监控装置,整个安全监控装置采用自走车辆设计,因此能够采用自主导航的方式沿着设定的巡检路线移动并且在沿路径移动的同时完成多个位置的巡检监控作业,通过灵活的移动提升巡检监控的及时性。通过设置由回转平台、多级支臂、多级支座等构成的机械臂组件,令传感器组件能够灵活地指向不同的巡检监控位置,有效解决监控死角问题,提升监控的全面性和准确性。通过设置传感器装载盘并且将多种不同类型的传感器组件装载在传感器装载盘上,在进行特定位置特定类型的监控作业时,机械臂组件按照程序设定自动地取用适配类型的传感器组件,因此本移动时安全监控装置同时具备多种类型的监控能力,满足复杂现场对于设备监控能力的要求,由于将传感器组件安装在三级支臂的前端,因此本安全监控装置更易于将传感器组件伸入到巡检位置的狭小空间内,进一步解决现有固定式监控方案具有的监控盲区问题。
附图说明
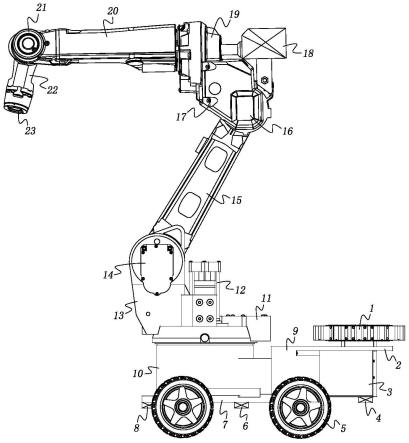
16.图1是本发明的主视结构示意图;
17.图2是本发明的立体结构示意图;
18.图3是图1中信号收发器、二级俯仰电机和二级支座的结构示意图;
19.图4是图1中传感器装载盘的结构示意图;
20.图5是图4中传感器座和锁止器的结构示意图;
21.图6是本发明中传感器组件、接头组件、转接端子以及信号收发器的连接结构示意图。
22.图中:
23.1、传感器装载盘;1-1、驱动电机;1-2、皮带;1-3、轴座;1-4、转盘;1-5、传感器座;1-6、锁止器;2、支撑面板;3、装载盘驱动箱;4、后循迹传感器;5、车轮;6、二维码阅读器;7、底盘;8、前循迹传感器;9、控制箱;10、底座箱;11、回转底座;12、回转电机;13、一级支座;14、一级俯仰电机;15、一级支臂;16、二级俯仰电机;17、二级支座;18、信号收发器;18-1、外壳;18-2、插接端子;18-3、插接颈管;18-4、手柄;19、摇摆电机;20、二级支臂;21、摆角电机;22、三级支臂;23、接头组件;23-1、端子外套;23-2、压圈;23-3、连接端子;23-4、内衬胶套;24、转接端子;25、导联线;26、传感器组件;26-1、后部套管;26-2、传感器端子;26-3、环形凸台;26-4、传感器;26-5、前部套管。
具体实施方式
24.为能进一步了解本发明的发明内容、特点及功效,兹举以下实施例详细说明。
25.请参见图1和图2,本发明的移动式安全监控装置包括带有车轮5的底盘7,在底盘7上安装有控制箱9,在控制箱9内安装有控制器,各车轮5均为配置独立驱动电机的自走车轮,各车轮5的电机与控制箱9内的控制器连接。
26.控制器包括处理器模块、存储模块、电源管理模块和电机驱动模块,各车轮5的电机与电机驱动模块连接,在控制箱9内设有可充电电池,可充电电池与电源管理模块连接,在控制箱9上还安装有充电端子。
27.在控制箱9的顶部设有支撑面板2,在支撑面板2上安装有传感器装载盘1且在传感器装载盘1上装载有多个传感器组件26,如图中所示,在支撑面板2的底部安装有装载盘驱动箱3,装载盘驱动箱3将传感器装载盘1的位于支撑面板2下方的组件封闭在内部,提升设备运行的安全性,避免异物进入传感器装载盘1下方的传动部分造成卡阻问题。
28.本实施例中,在底盘7的前部中间位置安装有前循迹传感器8,在装载盘驱动箱3的底部中间位置安装有后循迹传感器4,前循迹传感器8和后循迹传感器4与控制器的处理器模块连接。设置前后循迹传感器是为了实现本安全监控装置的循迹式移动控制,循迹传感器用于感知、读取地面上的预设导向踪迹。
29.具体地,前循迹传感器8和后循迹传感器4两者的结构相同,均包括底部安装有光发射及接收阵列的循迹基板(循迹基板与所在的底板固定连接),在循迹基板的底部安装有遮光罩,遮光罩包括与光发射及接收阵列的多个光发射及接收器位置对应的多个筒体,各筒体将各光发射及接收器的光路隔离,也就是各光发射及接收器向下沿筒体发出光线线束,反射回去的光线线束仍然回到本筒体内,这样防止了阵列内各光发射及接收器之间的干扰,多个光发射及接收器构成阵列的方式能够保证循迹移动时对地面预设踪迹跟踪的可靠性。
30.本实施例中,在底盘7的中部安装有二维码阅读器6,二维码阅读器6用于本移动时式安全监控装置阅读地面粘贴的二维码标签,二维码标签设置在需要进行巡检监控的位置,本安全监控装置沿着设定的轨迹移动时,当二维码阅读器6阅读到地面定位标签时,控制器根据标签内容与存储模块内预设的信息作比对,判断到达的位置以及监控的类型,之后调用类型匹配的传感器组件26执行具体的监控作业,完成一个位置的监控作业后继续沿着设定路径移动,直至下一个监控位置。
31.在底盘7上安装有底座箱10,在底座箱10的顶部安装有回转底座11以及驱动回转
底座11转动的回转电机12,回转电机12与控制器的电机驱动模块连接。具体地,如图中所示,底座箱10为圆柱形形状,在其内部安装有齿圈,在底座箱10与回转底座11之间安装有轴承,在回转电机12的输出轴上安装有齿轮,该齿轮与底座箱10内的齿圈啮合传动,通过控制回转电机12作正转或者反转转动,令回转底座11及其附属部件作正向或反向转动。
32.在回转底座11上安装有一级支座13,在一级支座13的上端铰接安装有一级支臂15并安装有驱动一级支臂15的一级俯仰电机14,一级俯仰电机14与控制器的电机驱动模块连接。通过控制一级俯仰电机14作正转或者反转转动,令一级支臂15作向下或者向上的转动。
33.在一级支臂15的上端铰接安装有二级支座17并安装有驱动二级支座17的二级俯仰电机16,在二级支座17的上端铰接安装有二级支臂20并安装有驱动二级支臂20的摇摆电机19,二级俯仰电机16和摇摆电机19均与控制器的电机驱动模块连接。通过控制二级俯仰电机16作正转或者反转转动,令二级支臂20及其附属部件作向下或者向上的转动。通过控制摇摆电机19作正转或者反转转动,令二级支臂20及其附属部件作向左或者向右的摆动。
34.在二级支臂20的前端铰接安装有三级支臂22并安装有驱动三级支臂22的摆角电机21,摆角电机21与控制器的电机驱动模块连接。通过控制摆角电机21作正转或者反转转动,令三级支臂22及其附属部件作向前或者向后的摆动。
35.前述回转底座11、一级支座13、一级支臂15、二级支座17、二级支臂20和三级支臂22共同构成了多级机械臂组件,传感器组件26安装在机械臂组件的前端,多级形式的机械臂能够保证传感器组件26移动的灵活性,同时前述机械臂能够令传感器组件26伸入到较为狭小的空间内进行监控,解决现有巡检监控模式下的监控盲区问题。
36.在三级支臂22的端部安装有接头组件23,传感器组件26与接头组件23插接连接,设置接头组件23的目的是令传感器组件26能够拆装。
37.请参见图2和图6,可以看出:
38.在三级支臂22的前端设有套管,接头组件23包括采用压圈23-2压持固定在所述套管内的端子外套23-1,在端子外套23-1内安装固定有连接端子23-3,端子外套23-1及其连接端子23-3置入套管内,压圈23-2与套管螺纹连接。如图中所示,连接端子23-3为公端子,包括基座,在基座的前部中间设有接线端子,在接线端子的两侧设有定位连接柱。本实施例中,为了对插接连接的传感器组件26进行更好地固定,在端子外套23-1的前部内壁上安装有内衬胶套23-4,当传感器组件26插接连接到接头组件23内时,内衬胶套23-4受到挤压形变作用,提升传感器组件26与接头组件23之间插接连接的可靠性。
39.请参见图6,可以看出:
40.传感器组件26包括位于中部的环形凸台26-3,在环形凸台26-3的一侧设有后部套管26-1、另一侧设有前部套管26-5,在后部套管26-1内安装固定有与连接端子23-3插接的传感器端子26-2,在前部套管26-5的端部安装有传感器26-4,传感器26-4通过内线缆与传感器端子连接26-2。如图中所示,传感器端子26-2为母端子,包括基座,在基座的后部中间位置设有接线端子,在接线端子的两侧设有定位插孔。传感器组件26向接头组件23内插接连接时,后部套管26-1插入端子外套23-1的内部并且挤压内衬胶套23-4,连接端子23-3的接线端子与传感器端子26-2的接线端子插接连接形成信号导通通路,连接端子23-3的定位连接柱插接连接在传感器端子26-2的定位插孔内。
41.还包括转接端子24和信号收发器18,接头组件23的连接端子23-3通过导联线25与
转接端子24连接,信号收发器18与转接端子24插接连接。转接端子的作用是与信号收发器18进行插接连接,这样信号收发器18与本安全监控装置的主体之间就是插接连接的关系,能够方便地将信号收发器18取下来。
42.如图6中所示,转接端子24为公端子,包括基座,在基座的前部中间设有接线端子,在接线端子的两侧设有定位连接柱。本实施例中,如图3中所示,在二级支座17的中部设有横向贯通的通孔,转接端子24安装固定在所述通孔内,信号收发器18的前部插入所述通孔内并与转接端子24连接。
43.请参见图6,可以看出:
44.信号收发器18包括外壳18-1,在外壳18-1的前部设有插接颈管18-3,在插接颈管18-3的前端安装有与转接端子24连接的插接端子18-2。如图中所示,插接端子18-2为母端子,包括基座,在基座的后部中间位置设有接线端子,在接线端子的两侧设有定位插孔。信号收发器18的前端与转接端子24插接连接时,转接端子24的接线端子与插接端子18-2的接线端子插接连接形成信号导通通路,转接端子24的定位连接柱插接连接在插接端子18-2的定位插孔内。
45.在外壳18-1内安装有处理器模块以及与处理器模块连接的模数转换模块、无线通信模块和电源模块,在外壳18-1上还安装有与电源模块连接的充电接线端子。通过外置电源线为信号收发器18进行充电,传感器模块26获取的信号通过逐级连接的端子以及导联线发送给模数转换模块,由模数转换模块进行模数转换之后发送给处理器模块,处理器模块通过无线通信模块将数据信息发送给管理信息系统,管理信息系统接收数据信息并且进行计算,得出安全巡检监控的判断,在显示屏上进行显示的同时对于监控异常情况发出警示提示。
46.本实施例中,在外壳18-1的底部安装有手柄18-4,手柄18-4与二级支座17可拆卸地连接,具体地如图中所示,在手柄18-4上设有连接孔,当信号收发器18向本安全监控装置上插接安装后,手柄18-4与二级支座17上的连接基座抵靠,采用螺钉将手柄18-4与连接基座进行固定。
47.请参见图4和图5,可以看出:
48.传感器装载盘1包括安装在支撑面板2底部的轴座1-3以及安装在轴座1-3侧部的驱动电机1-1,安装在驱动电机1-1的输出轴上的主动轮与安装在轴座1-3内的转轴下端的从动轮采用皮带1-2传动。在转轴的上端安装有转盘1-4,在转盘1-4的外缘安装有多个周向等角度间隔的传感器座1-5,在每个传感器座1-5上还安装有对传感器组件26进行锁止固定的锁止器1-6。本安全监控装置配备有多个外形如图6中所示经标准化设计的传感器组件26,在使用时传感器组件26由机械臂组件取用,完成监控作业后机械臂组件将传感器组件26返回放置在原位置。传感器组件26包括但不限于气体传感器(如燃气传感器)、探伤传感器(如超声波传感器)、微型摄像头等。
49.传感器装载盘1能够回转转动,因而在每次提取或回放传感器组件26时,传感器装载盘1都可以进行适配的转动,这样每次取放传感器组件26的操作位置可以相同,例如每次取放传感器组件26时传感器装载盘1均将这个传感器组件26转动到前方中间位置,这样能够令机械臂组件的动作归一化,提升对传感器组件26进行提取和放置时的位置准确性。
50.传感器座1-5采用螺钉安装固定在转盘1-4的外缘,在传感器座1-5上设有供传感
器组件26的前部套管26-5插入的、上下贯通的通孔。
51.在前部套管26-5的侧壁上设有环形销槽,锁止器1-6为电推杆且安装在传感器座1-5的内侧,电推杆的壳体外端与传感器座1-5固定连接,在传感器座1-5的侧壁上设有供电推杆的活动端穿入的销孔,电推杆的活动端嵌入环形销槽内对传感器组件26进行锁止固定。在非使用状态下,通过锁止器1-6对传感器组件26提供锁止固定作用,避免传感器组件26在振动作用下发生移位。
52.工作方式:
53.在地面上设置巡检的循迹轨迹,并且在需要进行停留巡检监控的特定位置设置二维码标签;本安全监控装置沿着循迹轨迹移动,当二维码扫描器6扫描到二维码标签时,本安全监控装置停止移动;按照设定的程序,控制器先根据扫描得到的二维码里面的位置编号信息,判断需要选取的传感器类型;
54.传感器装载盘1自行转动直至确定的传感器组件26移动到传感器装载盘1的前部中间位置,之后停止转动,锁止器1-6解除对该传感器组件26的锁定作用后,机械臂组件从传感器装载盘1上将传感器组件26进行提取使用,具体地:令三级支臂22及其附属部件以竖直的状态向下移动直至传感器组件26的后部套管26-1插入接头组件23内且端子完成连接,之后机械臂组件按照编程设定的路径对传感器组件26进行移动,对于特定的监控位置,通过移动传感器组件26的位置来尽量接近被监控的对象并且移动多个位置完成多点位监控作业;在此过程中,传感器组件26获取的信号通过逐级连接的端子以及导联线25发送给信号收发器18,信号收发器18将数字信号以无线通信的方式发送给管理信息系统;
55.完成一个位置的监控作业之后,机械臂组件将当前的传感器组件26回放到传感器装载盘1上,传感器组件26的前部套管26-5完全插入到传感器座1-5的通孔内之后,锁止器1-6对传感器组件26进行锁止固定,之后机械臂组件抬升,传感器组件26停留在传感器装载盘1上;之后本安全监控装置沿着设定路径继续移动,直至到达下一个采用二维码标签标定的巡检监控位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1