柔轮组件、谐波减速器及机器人的制作方法
本发明涉及传动结构,更具体的说,它涉及一种柔轮组件、谐波减速器及机器人。
背景技术:
1、谐波减速器是一种由柔轮、刚轮、波发生器三大件组成的少齿差精密减速器。通常由伺服电机带动波发生器运行,进而驱动柔轮外齿和刚轮内齿的啮合,由于刚轮齿数通常比柔轮齿数多两齿,因此,在内外齿啮合的过程中,对柔轮的运行速度有效的减低,达到减速增扭的目的。由于谐波减速器中的柔轮是薄壁结构,通常杯筒厚度只有0.2~0.5mm,因此柔轮杯筒经长期运行后,材料在动载荷和交变应力的长期作用下,极易出现因累积损伤而引起的断裂现象,最终导致谐波减速器的损坏,进而影响自动化设备的正常运行,严重时甚至引起事故的发生,而现有的技术无法对该现象进行甄别及预警。另外,在一些机器人特殊应用场合,也需要对减速器剩余寿命及运行状态进行监测,以便更好的使用,这就需要对减速器的健康状态及指标进行监测并作出判断。
2、现有技术种提到了一种在应变波齿轮系统中的弹性传动元件,其在弹性传动元件的杯筒段和用于安装法兰的位置上,而该区域并非弹性元件运行时应力波动最大的区域,使得对应力的测试精度和敏感度不够,无法对柔轮进行可靠的健康预测和寿命评估。
技术实现思路
1、本发明公开了一种将检测机构设置在柔轮工作时产生形变的过渡段来提高检测精度和灵敏度的柔轮组件、谐波减速器及机器人,解决了现有技术中对柔轮的健康预测和寿命评估不可靠的问题。
2、本发明公开了一种柔轮组件,所述柔轮包括杯筒段(11)、齿轮段、过渡段和用于安装法兰盘的安装段(12),所述齿轮段位于所述杯筒段(11)一端;所述过渡段一端连接于所述杯筒段(11)另一端,另一端连接于所述安装段(12)上,且所述过渡段能够产生形变,所述检测机构设置于所述过渡段上;所述柔轮组件还包括补偿机构,所述补偿机构能够获取所述柔轮的运行参数,且所述补偿机构能够根据所述运行参数对检测机构的检测结果进行补偿。
3、所述过渡段包括相互连接的隔膜段和拐角段,所述隔膜段与安装段连接,所述拐角段与所述杯筒段连接,所述检测机构设置于所述隔膜段上和/或所述拐角段上。
4、所述检测机构设置于所述拐角段和所述隔膜段的连接处,且所述检测机构位于所述隔膜段上的尺寸不小于5mm。
5、所述检测机构包括至少两个应变片,所有所述应变片贴附于所述过渡段上。
6、所有所述应变片以所述柔轮的中心轴线为轴线呈环形分布于所述过渡段上。
7、所述补偿机构包括温度检测机构,所述温度检测机构设置于所述柔轮内,且所述温度检测机构与所述检测机构电连接。
8、所述补偿机构还包括电路板,所述电路板设置于所述安装段,且所述电路板与所述检测机构电连接。
9、所述电路板的形状为环形,所述电路板的外径小于所述安装段的内径,且所述电路板的内径大于所述杯筒段的直径。
10、所述电路板的厚度小于所述安装段的厚度。
11、本发明的另一方面提供一种谐波减速器,包括上述的柔轮组件。
12、本发明的另一方面提供一种机器人,包括上述的柔轮组件或上述的谐波减速器。
13、本发明的柔轮组件、谐波减速器及机器人,将检测机构设置在柔轮工作时产生形变的过渡段上,使得检测机构处于应力值变化最大的位置,从而能够对柔轮上产生的应力进行精确检测,同时提高检测的灵敏度,相对于现有技术将应变机构安装在齿轮段和杯筒段的技术方案来说,能够更加精确的反应柔轮所受到的扭矩值,进而可以对柔轮的使用寿命和健康状态进行精确评估,避免了由于柔轮损坏等而造成安全事故及重大经济损失,保证了谐波减速器及机器人的工作可靠。现有技术中在齿轮段和杯筒段连接处虽然也是薄弱环节,但是该位置所受的应力不仅包含齿的负载扭矩的应力,还包括柔轮齿被刚轮齿别住后的弯曲应力,应力复杂,所以如果检测此位置的应力不能精确反应柔轮齿的扭转应力,不能精确检测,本发明通过在杯筒段与法兰安装的安装段之间的隔膜过渡段安装应力检测机构,由于此处应力简单,仅有柔轮的扭转应力,检测更加精确,而且还能够通过检测到的力矩值和采集的力矩出现频率,进一步对减速器已跑合寿命和剩余寿命进行有效预测,还可以结合对冲击转矩范围的设定值,来对谐波减速器整个运行过程中柔轮所受到的冲击转矩次数进行统计,进而实现谐波减速器运行健康状态的检测,增强谐波减速器的智能化程度。相比以往在谐波减速器外部增加力传感器的扭矩感知系统结构,通过在柔轮的拐角段处布置应变片形成新的力矩感知系统,在接收相同运动控制器信号的情况下,本申请的谐波减速器在恒定加速的运行过程中,能够实现加速度的波动范围明显减小,且末端定位时间可以大幅缩短。
技术特征:
1.一种柔轮组件,其特征在于:包括柔轮和检测机构,所述柔轮包括杯筒段(11)、齿轮段、过渡段和用于安装法兰盘的安装段(12),所述齿轮段位于所述杯筒段(11)一端;所述过渡段一端连接于所述杯筒段(11)另一端,另一端连接于所述安装段(12)上,且所述过渡段能够产生形变,所述检测机构设置于所述过渡段上;所述柔轮组件还包括补偿机构,所述补偿机构能够获取所述柔轮的运行参数,且所述补偿机构能够根据所述运行参数对检测机构的检测结果进行补偿;所述补偿机构包括温度检测机构,所述温度检测机构设置于所述柔轮内,且所述温度检测机构与所述检测机构电连接。
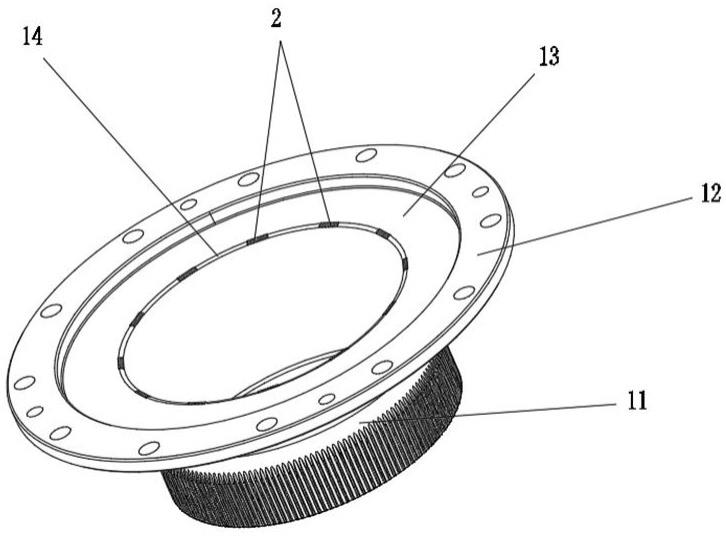
2.根据权利要求1所述的柔轮组件,其特征在于,所述过渡段包括相互连接的隔膜段(13)和拐角段(14),所述隔膜段(13)与安装段(12)连接,所述拐角段(14)与所述杯筒段(11)连接,所述检测机构设置于所述隔膜段(13)上和/或所述拐角段(14)上。
3.根据权利要求2所述的柔轮组件,其特征在于,所述检测机构设置于所述拐角段(14)和所述隔膜段(13)的连接处,且所述检测机构位于所述隔膜段(13)上的尺寸不小于5mm。
4.根据权利要求1所述的柔轮组件,其特征在于,所述检测机构包括至少两个应变片(2),所有所述应变片(2)贴附于所述过渡段上。
5.根据权利要求4所述的柔轮组件,其特征在于,所有所述应变片(2)以所述柔轮的中心轴线为轴线呈环形分布于所述过渡段上。
6.根据权利要求1所述的柔轮组件,其特征在于,所述补偿机构还包括电路板(3),所述电路板(3)设置于所述安装段(12),且所述电路板(3)与所述检测机构电连接。
7.根据权利要求6所述的柔轮组件,其特征在于,所述电路板(3)的形状为环形,所述电路板(3)的外径小于所述安装段(12)的内径,且所述电路板(3)的内径大于所述杯筒段(11)的直径。
8.根据权利要求6所述的柔轮组件,其特征在于,所述电路板(3)的厚度小于所述安装段(12)的厚度。
9.一种谐波减速器,其特征在于,包括权利要求1至8中任一项所述的柔轮组件。
10.一种机器人,其特征在于,包括权利要求1至8中任一项所述的柔轮组件或权利要求9所述的谐波减速器。
技术总结
本发明公开了一种柔轮组件、谐波减速器及机器人,解决了现有技术中对柔轮的健康预测和寿命评估不可靠的问题。柔轮组件包括柔轮和检测机构,所述柔轮包括杯筒段、过渡段和用于安装法兰盘的安装段,所述过渡段的一端连接于所述杯筒段上,另一端连接于所述安装段上,且所述过渡段能够产生形变,所述检测机构设置于所述过渡段上。本发明的柔轮组件、谐波减速器及机器人,将检测机构设置在柔轮工作时产生形变的过渡段上,从而能够对柔轮上产生的应力进行精确检测,同时提高检测的灵敏度,可以对柔轮的使用寿命和健康状态进行精确评估,避免了由于柔轮损坏等而造成安全事故及重大经济损失,保证了谐波减速器及机器人的工作可靠。
技术研发人员:钟成堡,程中甫,谷甲甲,张皓,刘成,史宝强
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!