减速机及机器人的制作方法
本技术涉及减速机及机器人。
背景技术:
1、以往,已知使用减速机的机器人。这种减速机使电动机的旋转运动减速,并传动给机器人的臂。臂以由减速机减速的转速转动(日本特开2007-085530号公报)。
2、上述公报的中空减速机是由曲柄轴、与曲柄轴的曲柄部嵌合并偏心运动的小齿轮、在内周面形成有与小齿轮的外齿啮合的内齿的壳体构成的行星齿轮装置。在中空减速机的内部,由中空圆管形成有中空孔。另外,中心齿轮间隙嵌合在中空圆管的外周,中心齿轮通过轴承可旋转地被支承。另外,在中空减速机的外周部,在中心齿轮的旋转轴心的周围等配地设置有8个电动机。
3、另外,各电动机的旋转从小齿轮传动到中心齿轮,通过中心齿轮的旋转使曲柄轴旋转而产生曲柄运动,通过与曲柄轴嵌合的小齿轮的行星运动使壳体减速旋转。由此,固定于中空减速机的壳体的机器人的输出部件被减速。但是,为了得到更大的减速比,有改善中心齿轮与各部分的位置关系的余地。
技术实现思路
1、本实用新型的目的在于提供一种通过在减速机中的各部分的位置关系上下功夫,能够得到更大减速比的技术。
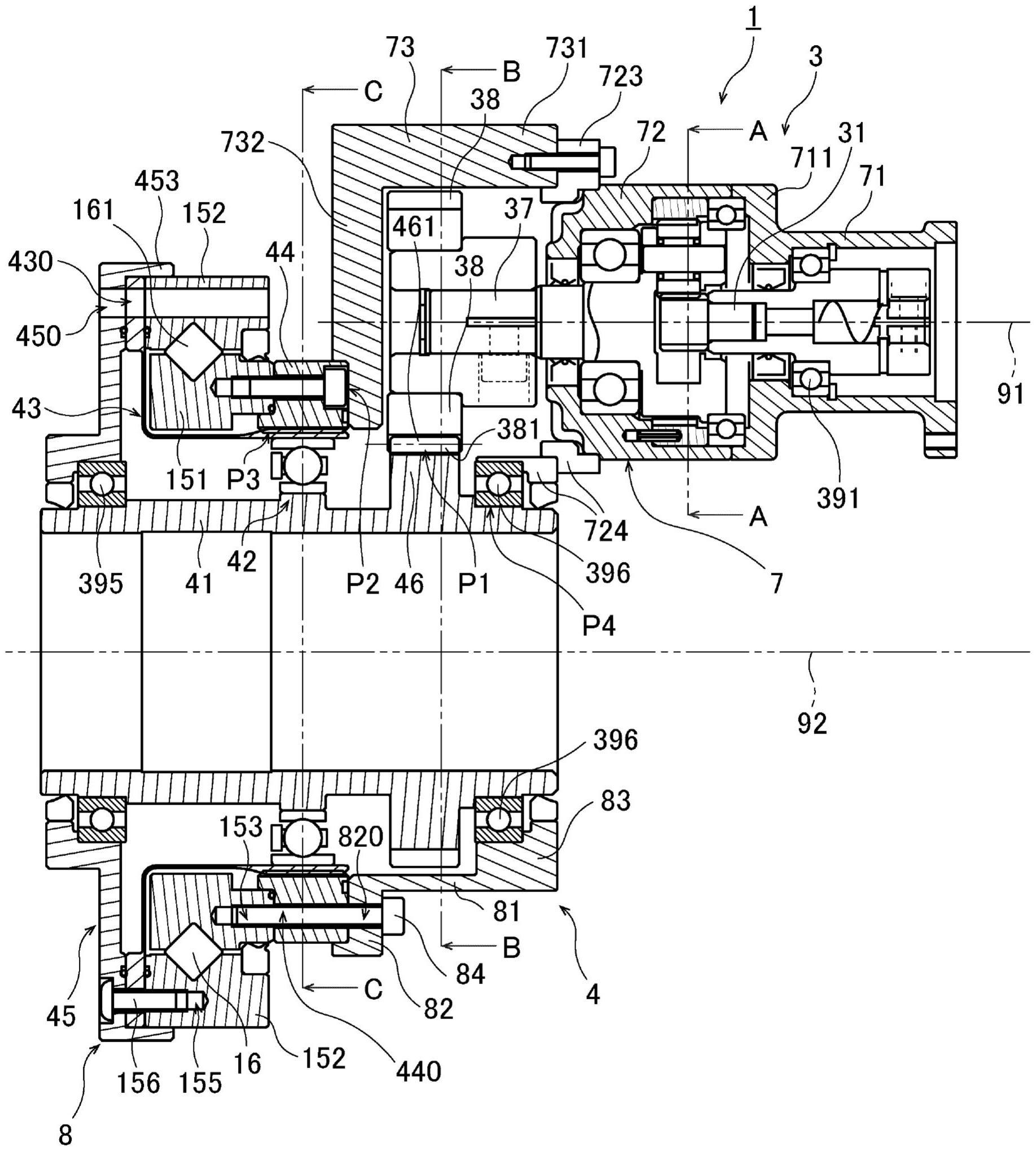
2、第一方案为一种减速机,其具备行星齿轮机构和波动齿轮机构,能够对作为所述行星齿轮机构的输入部的行星输入轴的旋转进行减速,并能够使作为所述波动齿轮机构输出部的波动输出轴旋转,所述行星齿轮机构具有:所述行星输入轴,其能够以第一旋转轴为中心以输入转速旋转;太阳齿轮,其固定于所述行星输入轴,具有形成于外侧面的外齿,能够以所述第一旋转轴为中心以所述输入转速旋转;多个行星齿轮,其配置在所述太阳齿轮的周围,具有从以所述第一旋转轴为中心的第一径向外侧与所述太阳齿轮的外齿啮合的外齿,能够随着所述太阳齿轮的旋转而自转;托架,其固定有多个行星轴,所述多个行星轴分别能够自转地支承所述多个行星齿轮;行星侧内齿齿轮,其是以所述第一旋转轴为中心的环状,在内侧面具有从第一径向外侧与所述多个行星齿轮的外齿啮合的内齿;以及行星输出轴,其沿所述第一旋转轴配置,与所述托架及所述行星侧内齿齿轮中任一方连接,能够以所述第一旋转轴为中心以第一中间转速旋转,所述波动齿轮机构具有:波动输入轴,其沿第二旋转轴以中空筒状延伸,随着所述行星输出轴的旋转,能够以所述第二旋转轴为中心以第二中间转速旋转;凸轮,其能够与所述波动输入轴一起旋转;柔性外齿齿轮,其能够根据所述凸轮的旋转而变形;环状的刚性内齿齿轮,其以所述第二旋转轴为中心;以及所述波动输出轴,其沿所述第二旋转轴配置,与所述柔性外齿齿轮及所述刚性内齿齿轮中的任一方连接,能够以所述第二旋转轴为中心以输出转速旋转,所述柔性外齿齿轮与所述刚性内齿齿轮相互啮合,所述柔性外齿齿轮与所述刚性内齿齿轮能够利用齿数的不同而相对旋转,其特征在于,所述行星输出轴的一部分和所述波动输入轴的一部分在以所述第二旋转轴为中心的第二径向重叠。
3、第二方案为第一方案涉及的减速机,其特征在于,还具有:行星侧传动齿轮,其固定于所述行星输出轴,或者与所述行星输出轴为一体部件,具有形成在外侧面的外齿,能够以所述第一旋转轴为中心以所述第一中间转速旋转;以及波动侧传动齿轮,其固定于所述波动输入轴,或者与所述波动输入轴为一体部件,具有形成在外侧面的外齿,能够以所述第二旋转轴为中心以所述第二中间转速旋转,所述波动侧传动齿轮的外齿与所述行星侧传动齿轮的外齿连接,所述波动侧传动齿轮能够与所述波动输入轴一起以所述第二旋转轴为中心以所述第二中间转速旋转。
4、第三方案为第二方案涉及的减速机,其特征在于,所述行星齿轮机构还具有收容所述多个行星齿轮至少一部分的行星侧壳体,所述波动侧传动齿轮外齿的齿数大于所述行星侧传动齿轮外齿的齿数,所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置相比所述行星侧壳体的第一径向的外端更靠近所述第一旋转轴。
5、第四方案为第三方案涉及的减速机,其特征在于,所述行星侧内齿齿轮和所述行星侧壳体是一体部件。
6、第五方案为第一方案或第二方案涉及的减速机,其特征在于,所述行星齿轮机构还具有收容所述多个行星齿轮至少一部分的行星侧壳体,所述行星侧内齿齿轮固定于所述行星侧壳体的内侧面,所述行星输出轴与所述托架连接。
7、第六方案为第一方案或第二方案涉及的减速机,其特征在于,所述行星齿轮机构还具有收容所述多个行星齿轮至少一部分的行星侧壳体,所述托架固定于所述行星侧壳体,所述行星输出轴与所述行星侧内齿齿轮连接。
8、第七方案为第一方案或第二方案涉及的减速机,其特征在于,所述行星齿轮机构具有配置在前级的前级行星齿轮装置和配置在比所述前级行星齿轮装置靠后级的后级行星齿轮装置,所述前级行星齿轮装置具有:作为所述行星输入轴的前级行星输入轴;作为所述太阳齿轮的前级太阳齿轮;作为所述多个行星齿轮的多个前级行星齿轮;作为所述托架的前级托架;作为所述行星侧内齿齿轮的前级行星侧内齿齿轮;以及前级行星输出轴,其沿所述第一旋转轴配置,与所述前级托架连接,是能够以所述第一旋转轴为中心旋转的输出轴,所述后级行星齿轮装置具有:后级行星输入轴,其固定于所述前级行星输出轴,能够以所述第一旋转轴为中心旋转;后级太阳齿轮,其固定于所述后级行星输入轴,具有形成于外侧面的外齿,能够以所述第一旋转轴为中心旋转;多个后级行星齿轮,其配置在所述后级太阳齿轮的周围,具有从第一径向外侧与所述后级太阳齿轮的外齿啮合的外齿,随着所述后级太阳齿轮的旋转而自转;后级托架,其固定有多个后级行星轴,所述多个后级行星轴分别能够自转地支承所述多个后级行星齿轮;后级行星侧内齿齿轮,其是以所述第一旋转轴为中心的环状,在内侧面具有从第一径向外侧与所述多个后级行星齿轮的外齿啮合的内齿;以及后级行星输出轴,其沿所述第一旋转轴配置,与所述后级托架连接,并与能够以所述第一旋转轴为中心以所述第一中间转速旋转的所述行星输出轴连接。
9、第八方案为第七方案涉及的减速机,其特征在于,所述行星输出轴和所述后级行星输出轴是一体部件。
10、第九方案为第二方案至第四方案中任一方案涉及的减速机,其特征在于,所述波动侧传动齿轮外齿的齿数大于所述行星侧传动齿轮的外齿的齿数,所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置相比所述凸轮的第二径向的外端更远离所述第二旋转轴。
11、第十方案为第一方案至第四方案中任一方案涉及的减速机,其特征在于,所述波动齿轮机构还具有收容所述柔性外齿齿轮至少一部分的波动侧壳体,所述波动侧壳体的第二径向的外端相比所述第一旋转轴更远离所述第二旋转轴。
12、第十一方案为第十方案涉及的减速机,其特征在于,所述刚性内齿齿轮和所述波动侧壳体为一体部件。
13、第十二方案为第二方案至第四方案中任一方案涉及的减速机,其特征在于,所述柔性外齿齿轮与所述刚性内齿齿轮的啮合位置,相比所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置更远离所述第二旋转轴。
14、第十三方案为第二方案涉及的减速机,其特征在于,所述行星齿轮机构还具有收容所述多个行星齿轮至少一部分的行星侧壳体,所述行星侧壳体具有从轴向一方侧包围所述行星输出轴的行星壳体顶面部,所述行星壳体顶面部和所述刚性内齿齿轮在相比所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置更远离所述第二旋转轴、且相比所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置更靠轴向一方侧被固定。
15、第十四方案为第十三方案涉及的减速机,其特征在于,所述行星齿轮机构还具有外圈固定于所述行星侧壳体的支承轴承,所述波动输入轴在相比所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置更靠近所述第二旋转轴、且相比所述行星侧传动齿轮的外齿与所述波动侧传动齿轮的外齿的啮合位置更靠轴向另一方侧固定于所述支承轴承的内圈。
16、第十五方案为第二方案至第四方案中任一方案涉及的减速机,其特征在于,所述波动侧传动齿轮和所述波动输入轴是一体部件。
17、第十六方案为第二方案至第四方案中任一方案涉及的减速机其特征在于,所述波动侧传动齿轮的外径与所述波动输入轴的外径大致相同。
18、第十七方案为第一方案至第四方案中任一方案涉及的减速机,其特征在于,所述柔性外齿齿轮具有:筒部,其沿着所述第二旋转轴以中空筒状延伸;以及凸缘部,其从所述筒部的轴向一方侧的端部朝向第二径向外侧扩展,所述凸缘部固定于所述波动输出轴。
19、第十八方案为一种机器人,其特征在于,具有第一方案至第十七方案中任一方案涉及的减速机。
20、根据本实用新型,在减速机或搭载于机器人的减速机中,通过在前级配置行星齿轮机构,在后级配置波动齿轮机构,能够增大减速比。
21、有以下的本实用新型优选实施方式的详细说明,参照附图,可以更清楚地理解本实用新型的上述及其他特征、要素、步骤、特点和优点。
- 还没有人留言评论。精彩留言会获得点赞!