一种兼顾能量回收与能量释放的双差减速器
本发明涉及一种人形机器人关节减速器,用于爆发驱动与吸收冲击,属于精密传动领域。
背景技术:
1、机器人作为新兴技术的重要载体和现代产业的关键装备,引领产业数字化发展、智能化升级,不断孕育新产业新模式新业态。
2、人形机器人的目标是要“仿人”,此目标决定了人形机器人身高、体积要与人类似。当前人形机器人在应对奔跑、跳跃等外界复杂环境下的运动,爆发驱动与落地缓冲过程中的载荷与速度状态具有复杂的方向突变和幅值剧烈变化。为了应对这一挑战,当前的主要应对措施是采用液压驱动的驱动器或在传统电驱动刚性关节的基础上添加弹簧阻尼系统,以实现对爆发与抗冲击的响应。然而,液压系统在恒压运行时效率低,液压驱动难度高,系统成本昂贵,并且增大了机器人关节的体积,不符合人形机器人“仿人”目标。传统的电驱动刚性关节加入弹簧阻尼后虽然考虑了地面接触环境的影响但是碰撞模型的参数难以确定,同时存在稳定性降低,机器人疲劳寿命降低的问题。因此研制体积小、控制简单、精度高的面向爆发驱动抗冲击关节迫在眉睫。
3、电驱动关节展现出在控制与精度方面的显著优势,目前应对爆发驱动的研究主要集中在提高电机的负载能力和功率密度方面,但对于减速器的研究仍然停留在传统刚性减速器上。因此,亟需从减速器的角度进行深入研究,以实现对爆发驱动与抗冲击的更为有效的控制。
技术实现思路
1、针对目前具有爆发与抗冲击能力的机器人电驱动关节的空白,本发明提出了一种面向机器人爆发驱动与抗冲击的新型精密减速器,解决了上述技术的不足,并具有体积小,功率密度大、精度高与可实时调节减速器比的特点。
2、本发明采用如下技术方案:
3、一种兼顾能量回收与能量释放的双差减速器,该双差减速器是一种面向爆发驱动与抗冲击的精密减速器,包括锥齿轮、壳体、轴承、支撑轴和间隙调节片;锥齿轮的数量为八个,八个所述锥齿轮包括但不限于交错轴齿轮;
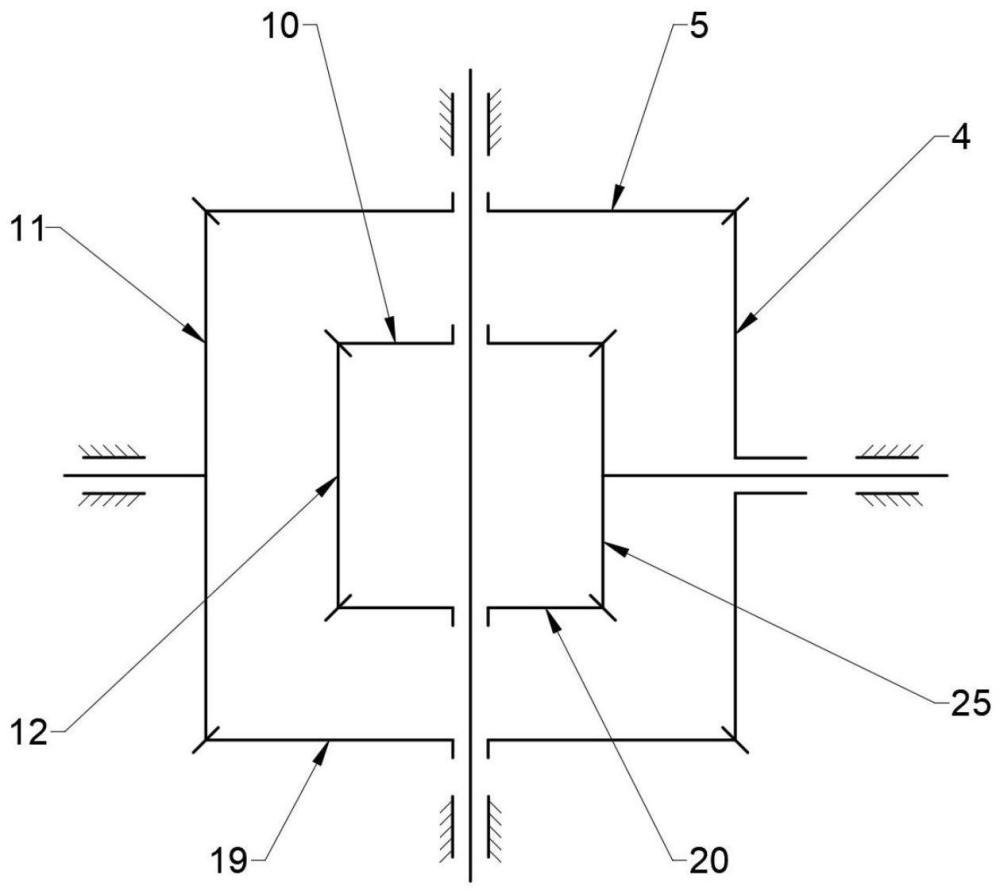
4、更具体地,包括输出轴1、轴承一2、壳体一3、副输入锥齿轮4、动能载体大锥齿轮一5、壳体二6、轴承二7、动能载体轴8、轴承三9、动能载体小锥齿轮一10、主输入锥齿轮11、支撑锥齿轮12、轴承四13、紧固螺母14、轴承五15、定位套筒一16、轴承六17、轴承七18、动能载体大齿轮二19、动能载体小齿轮二20、轴承八21、轴承九22、禁锢螺母23、定位套筒二24、输出锥齿轮25;锥齿轮的数量为八个,八个所述锥齿轮包括但不限于交错轴齿轮;
5、所述壳体一3与壳体二6通过螺栓固接;主输入锥齿轮11通过和轴承五15配合与壳体二6连接;动能载体轴8通过轴承将动力载体大锥齿轮一5、动能载体小锥齿轮一10、动能载体小锥齿轮二20、动能载体大齿轮二19串联,输出轴1通过轴承将支撑锥齿轮12、输出锥齿轮25、副输入锥齿轮4串联,其中动力载体大锥齿轮一5与动能载体小锥齿轮一10紧固配合,动能载体小锥齿轮二20与动能载体大齿轮二19紧固配合。其中主输入锥齿轮11、支撑锥齿轮12、输出锥齿轮25、副输入锥齿轮4同轴,动力载体大锥齿轮一5、动能载体小锥齿轮一10、动能载体小锥齿轮二20、动能载体大齿轮二19同心。轴承五与壳体二6及主输入锥齿轮11配合,使主输入锥齿轮11可相对壳体二6转动;轴承四13、轴承六17、轴承七18、轴承一2四个轴承分别与支撑锥齿轮12、输出锥齿轮25、副输入锥齿轮4及输出轴1配合,使支撑锥齿轮12、输出锥齿轮25、副输入锥齿轮4三个锥齿轮能够相对输出轴1转动;轴承二7、轴承三9、轴承八21、轴承九22四个轴承与动力载体大锥齿轮一5、动能载体小锥齿轮一10、动能载体小锥齿轮二20、动能载体大齿轮二19及动能载体轴8配合,使动力载体大锥齿轮一5、动能载体小锥齿轮一10、动能载体小锥齿轮二20、动能载体大齿轮二19四个锥齿轮可相对动能载体轴8转动。
6、作为本技术方案的进一步优化,一种结构紧凑且通用性好的齿轮传动系统。八个所述锥齿轮为外圈四个大锥齿轮和内圈四个小锥齿轮组成,
7、主输入锥齿轮11同时与动能载体大锥齿轮一5、动能载体大齿轮二19啮合,动能载体大锥齿轮一5、动能载体大齿轮二19同时与副输入锥齿轮4啮合,主输入锥齿轮11与副输入锥齿轮4的基本参数一致,动能载体大锥齿轮一5与动能载体大齿轮二19的基本参数一致,支撑锥齿轮12同时与动能载体小锥齿轮一10、动能载体小锥齿轮二20啮合,动能载体小锥齿轮一10、动能载体小锥齿轮二20同时与输出锥齿轮25啮合,支撑锥齿轮12与输出锥齿轮25的基本参数一致,动能载体小锥齿轮一10与动能载体小锥齿轮二20的基本参数一致。
8、作为本技术方案的进一步优化,发明了一种八个锥齿轮组成的内外环结构。所述结构上具有扩展性,在主输入锥齿轮11、副输入锥齿轮4进行双输入,在输出锥齿轮25、支撑锥齿轮12进行输出,形成多输入与多输出的结构,实现输出多个旋转自由度,便于在机器人关节模组中多自由度输出,减轻机器人重量,使机器人重心上移。
9、作为本技术方案的进一步优化,本发明提供了一种可实现减速比范围大的齿轮传动系统,所述锥齿轮通过调节相互啮合齿轮的齿数差,调整减速比,减速比范围可达0-300。
10、作为本技术方案的进一步优化,本发明提供了承载能力强且噪声低的精密减速器,所述精密减速器的齿轮传动系统采用锥齿轮传动,锥齿轮重合度高,承载能力强,构成承载能力强、噪声低的精密减速器,包括弧齿锥齿轮但不限于弧齿锥齿轮,可采用摆线齿等其他齿形的锥齿轮。
11、作为本技术方案的进一步优化,本发明提供了可实时调节减速比的精密减速器,所述精密减速器中主输入锥齿轮11、副输入锥齿轮4作为输入齿轮,主输入锥齿轮11为主输入,副输入锥齿轮4为副输入,输出锥齿轮25为输出齿轮,主输入锥齿轮11提供额定输入时,副输入锥齿轮4提供较小的输入可改变输出输出锥齿轮25的输出状态,实现实时调节精密减速器的减速比。
12、作为本技术方案的进一步优化,本发明的精密减速器具有储存能量与释放能量功能,所述精密减速器中主输入锥齿轮11、副输入锥齿轮4作为输入齿轮,主输入锥齿轮11为主输入,副输入锥齿轮4为副输入,输出锥齿轮25为输出齿轮,主输入锥齿轮11提供额定功率输入时,副输入锥齿轮4反向功率输入可使输出锥齿轮25的转速降低,直至输出为0,此时减速器内部动能载体大锥齿轮一5、动能载体小锥齿轮一10、动能载体大齿轮二19、动能载体小齿轮二20既存在公转又存在自转,通过自身转动惯性实现能量储存,对应机器人吸收冲击的过程,实现柔性缓冲;当副输入锥齿轮开始减速至0并正向加速时,内部锥齿轮5、动能载体小锥齿轮一10、动能载体大齿轮二19、动能载体小齿轮二20由于自身转动惯性储存的动能转移至输出锥齿轮25,实现能量释放,对应机器人爆发驱动的过程,实现变刚度爆发。
13、作为本技术方案的进一步优化,壳体一3可安装包括无框电机但不仅限于无框电机的类似电机驱动副输入锥齿轮4,壳体二6可安装包括无框电机但不仅限于无框电机的类似电机驱动主输入锥齿轮11。
14、本技术方案相较于传统刚性的摆线针轮减速器和柔性的谐波减速器,可以实现刚柔耦合。在副输入锥齿轮反向功率输入过程中,输出锥齿轮吸收外接装置的转动能量,将能量传输到内部内部动能载体大锥齿轮一、动能载体小锥齿轮一、动能载体大齿轮二、动能载体小齿轮二四个齿轮中去,实现柔性吸收外界冲击的过程;在副输入锥齿轮从反向功率输入到降速为0再到正向功率输入的过程中,能量从内部内部动能载体大锥齿轮一、动能载体小锥齿轮一、动能载体大齿轮二、动能载体小齿轮二四个齿轮传输到输出锥齿轮,实现刚性爆发过程。所述精密减速器结构上具有扩展性,可同时具有多个输入和多个输出;所述精密减速器减速比范围大;所述精密减速器承载能力强且噪声低;所述精密减速器可实时调节减速比;所述精密减速器结构上具有储存能量与释放能量的功能。
- 还没有人留言评论。精彩留言会获得点赞!