一种用于真空容器充气抽气的系统的制作方法
[0001]
本发明属于流体力学领域,具体涉及一种用于真空容器充气抽气的系统。
背景技术:
[0002]
现有技术中真空系统的充气抽气装置在抽气过程中真空泵刚开启时容易导致真空系统内的气压突变,且在充气过程中充入的气体易在真空管道内形成湍流,因此实际使用中对真空系统中微尘的控制并不理想;cn202010105686.6 一种用于无尘化真空过程的慢充慢抽装置及方法(以下简称现有技术a)。
[0003]
现有技术a存在以下技术缺陷: 1、抽气充气速度慢,不适应大型真空容器的充气和抽气。
[0004]
2、系统复杂,成本高昂,结构复杂。
技术实现要素:
[0005]
为了解决以上技术问题,本发明提供了一种用于真空容器充气抽气的系统。
[0006]
1、一种用于真空容器充气抽气的系统,其特征在于:包含第一流速控制模块(t1)、第二流速控制模块(t2)、抽气泵(b1)、充气泵(b2)、第一阀(n1)、第二阀(n2)、气源、气道接口(jk)、压力表(ylb)、总控模块;第一流速控制模块(t1)、第二流速控制模块(t2)均为流速控制模块(t);流速控制模块(t)包括特斯拉阀和控制模块,特斯拉阀的每个旁路都具有控制阀,所有控制阀都单独的与控制模块之间具有控制连接,控制模块内具有
‘
关闭旁路操作
’
和
‘
打开旁路操作
’
这两个自动化操作流程,
‘
关闭旁路操作
’
执行完成后所有控制阀的流体通道处于闭塞状态,
‘
打开旁路操作
’
执行完成后所有控制阀的流体通道处于开放状态;流速控制模块(t)特斯拉阀具有第一端(
①
)和第二端(
②
),流体从第一端(
①
)流向第二端(
②
)为高阻方向,流体从第二端(
②
)流向第一端(
①
)为低阻方向;第一流速控制模块(t1)的第一端与第二流速控制模块(t2)的第一端相通;气道接口(jk)用于连通 第一流速控制模块(t1)的第二端和真空容器(c);第二流速控制模块(t2)的第二端 经由第一阀(n1)与抽气泵(b1)的进气端相通;第二流速控制模块(t2)的第二端 经由第二阀(n2)与充气泵(b2)的出气端相通;充气泵(b2)的进气端与气源相通;总控模块与第一流速控制模块(t1)的控制模块之间具有电学连接,总控模块可以控制第一流速控制模块(t1)的操作流程;总控模块与第二流速控制模块(t2)的控制模块之间具有电学连接,总控模块可以控制第二流速控制模块(t2)的操作流程;总控模块与抽气泵(b1)之间具有电学连接,总控模块可以控制抽气泵(b1)的启动或停止;
总控模块与充气泵(b2)之间具有电学连接,总控模块可以控制充气泵(b2)的启动或停止;总控模块与第一阀(n1)之间具有电学连接,总控模块可以控制第一阀(n1)的流体通道的开放或闭塞;总控模块与第二阀(n2)之间具有电学连接,总控模块可以控制第二阀(n2)的流体通道的开放或闭塞;压力表(ylb)的测量端与气道接口(jk)相通,压力表(ylb)的信号输出端与总控模块之间具有电学连接,压力表(ylb)能够向总控模块传递气压数据。
[0007]
2、进一步的:操作模块 与 总控模块之间具有电学连接,总控模块 可以接受用户通过操作模块传递的指令信号。
[0008]
3、进一步的:流速控制模块(t)的控制模块的
‘
关闭旁路操作
’
的流程是:按照离第一端的远近排序,以从近到远的顺序,依顺使各个旁路上的控制阀得流体通道闭塞。
[0009]
4、进一步的:流速控制模块(t)的控制模块的
‘
打开旁路操作
’
的流程是:按照离第一端的远近排序,以从近到远的顺序,依顺使各个旁路上的控制阀的流体通道开放。
[0010]
5、进一步的:流速控制模块(t)的控制模块的主要部件为plc。
[0011]
6、进一步的:总控模块的主要部件为plc。
[0012]
7、进一步的:气源为装有氮气的钢瓶。
[0013]
8、进一步的:总控模块内具有充气流程e,充气流程e的操作流程如下:根据需求预设常量:y1、y2、z1、z2;z2大于z1;e1、使第一阀(n1)得流体通道闭塞,使第二阀(n2)的流体通道闭塞;e2、使第二流速控制模块(t2)的控制模块执行
‘
关闭旁路操作
’
;e3、使第一流速控制模块(t1)的控制模块执行
‘
打开旁路操作
’
;e4、启动充气泵(b2),使第二阀(n2)的流体通道开放;e5、延时,时长为y1;e6、使第一流速控制模块(t1)的控制模块执行
‘
关闭旁路操作
’
;e7、延时,时长为y2;e8、通过ylb获取c内气压;e9、判断c内气压是否大于或等于预定值z1,如果判断结果为否则进入步骤e8,如果判断结果为是则进入e10;e10、使第一流速控制模块(t1)的控制模块执行
‘
打开旁路操作
’
;e11、通过ylb获取c内气压;e12、判断c内气压是否大于或等于预定值z2,如果判断结果为否则进入步骤e11,如果判断结果为是则进入e13;e13、使第二阀(n2)的流体通道闭塞,然后关闭充气泵(b2)。
[0014]
9、进一步的:总控模块内具有抽气流程f,充气流程f的操作流程如下:根据需求预设常量:x1、x2、d1、d2;d2小于d1;f1、使第一阀(n1)得流体通道闭塞,使第二阀(n2)的流体通道闭塞;f2、使第二流速控制模块(t2)的控制模块执行
‘
打开旁路操作
’
;f3、使第一流速控制模块(t1)的控制模块执行
‘
关闭旁路操作
’
;
f4、启动抽气泵(b1),使第一阀(n1)的流体通道开放;f5、延时,时长为x1;f6、使第二流速控制模块(t2)的控制模块执行
‘
关闭旁路操作
’
;f7、延时,时长为x2;f8、通过ylb获取c内气压;f9、判断c内气压是否小于或等于预定值d1,如果判断结果为否则进入步骤f8,如果判断结果为是则进入f10;f10、使第二流速控制模块(t2)的控制模块执行
‘
打开旁路操作
’
;f11、通过ylb获取c内气压;f12、判断c内气压是否低于或等于预定值d2,如果判断结果为否则进入步骤e11,如果判断结果为是则进入e13;f13、使第一阀(n1)的流体通道闭塞,然后关闭抽气泵(b1)。
[0015]
技术效果:1、本发明利用了特斯拉阀结构来实现充气和抽气速度控制,抽气和充气的速度增加平缓,能够降低系统内部微粒的传送,降低涡流,所以本发明提供了一条新的技术思路、2、相对于现有技术a本发明结构简单、成本低廉。
[0016]
3、相对于现有技术a本发明抽气和充气速度快,能够适应各种尺寸的真空容器,所以本发明具有适应性广的有益效果。
[0017]
4、相对于现有技术a本发明抽气和充气速度快,所以本发明具有适应性广的有益效果。
[0018]
5、相对于现有技术a本发明的寿命长。
[0019]
综上所述,本发明结构简单、成本低廉、适应性广、适应性广、寿命长,提供了一条新的技术思路。
附图说明
[0020]
图1是本发明的实施例1的流速控制模块(t)的示意图。
[0021]
图2是本发明的实施例1的流速控制模块(t)的控制模块的
‘
关闭旁路操作
’
的示意图。
[0022]
图3是本发明的实施例1的流速控制模块(t)的控制模块的
‘
打开旁路操作
’
的示意图。
[0023]
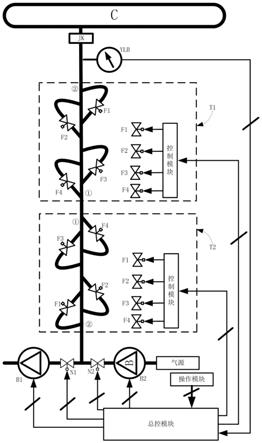
图4是本发明的实施例1的系统图。
[0024]
图5是本发明的实施例1的总控模块的充气流程图。
[0025]
图6是本发明的实施例1的总控模块的抽气流程图。
具体实施方式
[0026]
实施例1、一种用于真空容器充气抽气的系统,其特征在于:包含第一流速控制模块(t1)、第二流速控制模块(t2)、抽气泵(b1)、充气泵(b2)、第一阀(n1)、第二阀(n2)、气源、气道接口(jk)、压力表(ylb)、总控模块;第一流速控制模块(t1)、第二流速控制模块(t2)均为流速控制模块(t);
流速控制模块(t)包括特斯拉阀和控制模块,特斯拉阀的每个旁路都具有控制阀,所有控制阀都单独的与控制模块之间具有控制连接,控制模块内具有
‘
关闭旁路操作
’
和
‘
打开旁路操作
’
这两个自动化操作流程,
‘
关闭旁路操作
’
执行完成后所有控制阀的流体通道处于闭塞状态,
‘
打开旁路操作
’
执行完成后所有控制阀的流体通道处于开放状态;流速控制模块(t)特斯拉阀具有第一端(
①
)和第二端(
②
),流体从第一端(
①
)流向第二端(
②
)为高阻方向,流体从第二端(
②
)流向第一端(
①
)为低阻方向;第一流速控制模块(t1)的第一端与第二流速控制模块(t2)的第一端相通;气道接口(jk)用于连通 第一流速控制模块(t1)的第二端和真空容器(c);第二流速控制模块(t2)的第二端 经由第一阀(n1)与抽气泵(b1)的进气端相通;第二流速控制模块(t2)的第二端 经由第二阀(n2)与充气泵(b2)的出气端相通;充气泵(b2)的进气端与气源相通;总控模块与第一流速控制模块(t1)的控制模块之间具有电学连接,总控模块可以控制第一流速控制模块(t1)的操作流程;总控模块与第二流速控制模块(t2)的控制模块之间具有电学连接,总控模块可以控制第二流速控制模块(t2)的操作流程;总控模块与抽气泵(b1)之间具有电学连接,总控模块可以控制抽气泵(b1)的启动或停止;总控模块与充气泵(b2)之间具有电学连接,总控模块可以控制充气泵(b2)的启动或停止;总控模块与第一阀(n1)之间具有电学连接,总控模块可以控制第一阀(n1)的流体通道的开放或闭塞;总控模块与第二阀(n2)之间具有电学连接,总控模块可以控制第二阀(n2)的流体通道的开放或闭塞;压力表(ylb)的测量端与气道接口(jk)相通,压力表(ylb)的信号输出端与总控模块之间具有电学连接,压力表(ylb)能够向总控模块传递气压数据。
[0027]
操作模块 与 总控模块之间具有电学连接,总控模块 可以接受用户通过操作模块传递的指令信号。
[0028]
流速控制模块(t)的控制模块的
‘
关闭旁路操作
’
的流程是:按照离第二端的远近排序,以从近到远的顺序,依顺使各个旁路上的控制阀得流体通道闭塞。
[0029]
流速控制模块(t)的控制模块的
‘
打开旁路操作
’
的流程是:按照离第二端的远近排序,以从近到远的顺序,依顺使各个旁路上的控制阀的流体通道开放。
[0030]
流速控制模块(t)的控制模块的主要部件为plc。
[0031]
总控模块的主要部件为plc。
[0032]
气源为装有氮气的钢瓶。
[0033]
总控模块内具有充气流程e,充气流程e的操作流程如下:根据需求预设常量:y1、y2、z1、z2;z2大于z1;e1、使第一阀(n1)得流体通道闭塞,使第二阀(n2)的流体通道闭塞;e2、使第二流速控制模块(t2)的控制模块执行
‘
关闭旁路操作
’
;e3、使第一流速控制模块(t1)的控制模块执行
‘
打开旁路操作
’
;
e4、启动充气泵(b2),使第二阀(n2)的流体通道开放;e5、延时,时长为y1;e6、使第一流速控制模块(t1)的控制模块执行
‘
关闭旁路操作
’
;e7、延时,时长为y2;e8、通过ylb获取c内气压;e9、判断c内气压是否大于或等于预定值z1,如果判断结果为否则进入步骤e8,如果判断结果为是则进入e10;e10、使第一流速控制模块(t1)的控制模块执行
‘
打开旁路操作
’
;e11、通过ylb获取c内气压;e12、判断c内气压是否大于或等于预定值z2,如果判断结果为否则进入步骤e11,如果判断结果为是则进入e13;e13、使第二阀(n2)的流体通道闭塞,然后关闭充气泵(b2)。
[0034]
总控模块内具有抽气流程f,充气流程f的操作流程如下:根据需求预设常量:x1、x2、d1、d2;d2小于d1;f1、使第一阀(n1)得流体通道闭塞,使第二阀(n2)的流体通道闭塞;f2、使第二流速控制模块(t2)的控制模块执行
‘
打开旁路操作
’
;f3、使第一流速控制模块(t1)的控制模块执行
‘
关闭旁路操作
’
;f4、启动抽气泵(b1),使第一阀(n1)的流体通道开放;f5、延时,时长为x1;f6、使第二流速控制模块(t2)的控制模块执行
‘
关闭旁路操作
’
;f7、延时,时长为x2;f8、通过ylb获取c内气压;f9、判断c内气压是否小于或等于预定值d1,如果判断结果为否则进入步骤f8,如果判断结果为是则进入f10;f10、使第二流速控制模块(t2)的控制模块执行
‘
打开旁路操作
’
;f11、通过ylb获取c内气压;f12、判断c内气压是否低于或等于预定值d2,如果判断结果为否则进入步骤e11,如果判断结果为是则进入e13;f13、使第一阀(n1)的流体通道闭塞,然后关闭抽气泵(b1)。
[0035]
专利申请文本的面向对象是本领域普通技术人员,没有必要把现有技术或公知常识进行展示,本发明不详处为现有技术或公知常识,故不赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1