一种兼具清理功能的水下管道检测机器人的制作方法
0.3mm,相邻两个刷毛的间距为0.01-0.1mm。
[0012]
优选的,所述清理组件包括弧形板二、喷头以及液压缸,所述弧形板二有两个并对称设置,弧形板二的一端与连接板铰接,所述液压缸的两端分别与连接块、弧形板二铰接并用于实现弧形板二的开合,所述喷头有若干个且以连接板的轴心为圆心呈圆形阵列设置,喷头的进水端连接至设备舱内的高压水泵;
[0013]
喷头在喷水时能够给机器人一个沿着连接板的轴心旋转的作用力,密封组件前后两侧的清理组件工作时所产生的作用力驱使机器人旋转的方向相反。
[0014]
优选的,所述支撑机构有若干个并沿着弧形板二的内壁周向布置,具体包括支撑柱、支撑管、弹簧以及滚珠,所述支撑柱的一端固定于弧形板二的内壁上,支撑管滑动连接于支撑柱上并通过安装于支撑柱另一端的锁紧螺栓限位,所述弹簧套设于支撑柱上,所述滚珠滑动连接于支撑管的末端并与其构成一个球面副。
[0015]
优选的,所述推进器包括水平推进器和竖直推进器,水平推进器安装于支撑架上,竖直推进器安装于防护架的侧板上。
[0016]
本发明的优点在于:
[0017]
(1)本发明改变了传统的检测方式,将清理过程与检测过程同步进行,也即能够在对管道进行清理的同时对其进行摄像,并能够获取到相对清晰的图像,从而提高了检测效率,并保证了检测效果;
[0018]
(2)本发明中的密封组件能够过滤水体中的一些杂质,在管道上形成一个相对密封的清晰的拍摄区域,能够保证摄像头获取相对清晰的图像;
[0019]
(3)本发明中的清理组件在进行喷水清理时,能够驱动机器人围绕管道旋转,一方面,实现了管道表面的无死角清理,另一方面,还能够保证摄像头能够获取管道整个表面的图像信息,提高了检测效果;此外,清理组件配合水平推进器能够实现整个管道的清理及多点检测,适应性强。
附图说明
[0020]
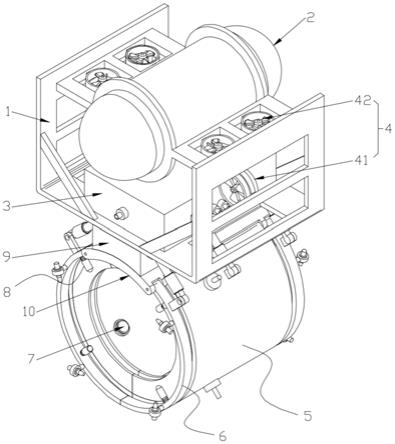
图1为本发明的结构示意图。
[0021]
图2为本发明的侧视图。
[0022]
图3为本发明中防护架以下部分的示意图。
[0023]
图4为本发明中连接板及其密封件的结构示意图。
[0024]
图5为本发明中清理组件的结构示意图。
[0025]
图6为图5的截面剖视图。
[0026]
图7为图6中a处的局部放大图。
[0027]
其中,1-防护架,2-密封舱,3-设备舱,4-推进器,41-水平推进器,42-竖直推进器,5-密封组件,51-弧形板一,52-密封件,53-液压缸,6-清理组件,61-弧形板二,62-喷头,7-摄像头,8-支撑机构,81-支撑柱,82-支撑管,83-弹簧,84-滚珠,9-连接块,10-连接板。
具体实施方式
[0028]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
[0029]
如图1至图7所示,一种兼具清理功能的水下管道检测机器人,包括防护架1、密封舱2、设备舱3、推进器4、密封组件5、清理组件6以及摄像头7;
[0030]
所述密封舱2通过横向的支撑架安装于防护架1上,其作用在于实现机器人的下潜及上浮,所述设备舱3安装于防护架1上并位于密封舱2的下方,所述推进器4安装于防护架1内并用于实现机器人的水下移动,所述防护架1的下端通过连接块9连接有连接板10;
[0031]
所述密封组件5安装于连接板10的两侧并能够根据需要开合,以实现管道检测过程中摄像头7所处拍摄区域的暂时性密封;
[0032]
所述清理组件6也安装于连接板10的两侧并能够根据需要开合,清理组件6有两个并分别位于密封组件5的前后两侧,以实现管道表面污物的清理,清理组件6上还设置有支撑机构8以实现其稳定支撑。
[0033]
在本实施例中,所述连接板10为弧形。
[0034]
在本实施例中,所述密封组件5包括弧形板一51、密封件52和液压缸53,所述弧形板一51有两个并对称设置,弧形板一51的一端与连接板10铰接,所述液压缸53的两端分别与连接块9、弧形板一51铰接并用于实现弧形板一51的开合,连接板10、两个弧形板一51构成一个圆柱形的密封区域,靠近弧形板一51及连接板10前后两端的内壁上各设有至少两道密封件52,所述摄像头7有多个并安装于弧形板一51上,摄像头7的镜头朝向弧形板一51的轴心。
[0035]
在本实施例中,所述密封件52包括橡胶带以及刷毛,所述橡胶带的一面粘结于连接板10及弧形板一51的内壁上,橡胶带的另一面设有若干均匀排列的刷毛,所述刷毛的直径为0.1-0.3mm,相邻两个刷毛的间距为0.01-0.1mm,图中做了简化处理。采用较细刷毛以及间距较小的布局,能够最大限度地将清理过程中混合在水体中的杂质阻隔在拍摄区域外,以保证获取清晰的图像。
[0036]
在本实施例中,所述清理组件6包括弧形板二52、喷头62以及液压缸53,所述弧形板二52有两个并对称设置,弧形板二52的一端与连接板10铰接,所述液压缸53的两端分别与连接块9、弧形板二52铰接并用于实现弧形板二52的开合,所述喷头62有若干个且以连接板10的轴心为圆心呈圆形阵列设置,喷头62的进水端连接至设备舱3内的高压水泵;
[0037]
喷头62在喷水时能够给机器人一个沿着连接板10的轴心旋转的作用力,密封组件5前后两侧的清理组件6工作时所产生的作用力驱使机器人旋转的方向相反。也即,若位于密封组件5前侧的清理组件6能够驱使机器人做顺时针旋转时,位于密封组件5后侧的清理组件6能够驱使机器人做逆时针旋转。
[0038]
在本实施例中,所述支撑机构8有若干个并沿着弧形板二52的内壁周向布置,具体包括支撑柱81、支撑管82、弹簧83以及滚珠84,所述支撑柱81的一端固定于弧形板二52的内壁上,支撑管82滑动连接于支撑柱81上并通过安装于支撑柱81另一端的锁紧螺栓限位,所述弹簧83套设于支撑柱81上,所述滚珠84滑动连接于支撑管82的末端并与其构成一个球面副。清理组件6工作时,滚珠84能够抵接在管道的外壁,使得本机器人能够保持在一个相对稳定的状态,不会在管道的径向产生较大的位移。
[0039]
在本实施例中,所述推进器4包括水平推进器41和竖直推进器42,水平推进器41安装于支撑架上,竖直推进器42安装于防护架1的侧板上。水平推进器41用于实现机器人的水平移动,竖直推进器42用于实现机器人的上下移动。
[0040]
本发明的工作过程如下:
[0041]
首先,机器人在密封舱2及推进器4的作用下下潜至目标管道处,并在达到合适位置后悬停;
[0042]
接着,位于设备舱3的油泵给清理组件6中的液压缸53供油,液压缸53伸出并驱动弧形板二52闭合,与连接板10一起,形成一个环形结构,支撑管82末端的滚珠84紧紧压在管道的外壁上,接着开启高压水泵并向密封组件5前侧的喷头62供水,经喷头62喷出的高压水流能够将附着于管道外壁上的污物清除,喷头62在喷水的同时会在反作用力的作用下驱动机器人旋转,如此,即可对管道外壁做无死角清理,与此同时,开启水平推进器41,机器人在前进的同时对管道外壁进行清理作业;
[0043]
当清理一段距离后,关闭高压水泵,清理组件6中的液压缸53缩回,弧形板二52与管道解除接触,悬停一段时间,让管道附近的污物随着水流流走,待水质清澈后,向密封组件5及清理组件6中的液压缸53同时供油,弧形板一51、弧形板二52均闭合,弧形板一51借助密封件52,以实现摄像头7所处拍摄区域的暂时性密封;接着开启高压水泵并向密封组件5前侧的喷头62供水,与此同时,开启水平推进器41,机器人继续在前进的同时对管道外壁进行清理作业。
[0044]
对于密封组件5后侧管道上未清理的区域,可以由高压水泵向后侧的喷头62供水并开启水平推进器41(此时推进器4的旋转方向与前述过程相反),以完成该区域的清理作业。
[0045]
若待检测管道的外壁比较干净,不需要清理,则可以不必开启高压水泵进行清理。
[0046]
由技术常识可知,本发明可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本发明范围内或在等同于本发明的范围内的改变均被本发明包含。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1