光斑轮廓的检测方法与流程
1.本发明涉及光学成像技术领域,特别涉及一种光斑轮廓的检测方法。
背景技术:
2.在科学实验和工程项目的很多情况下,都需要把光斑进行聚焦后再进行下一步工作,在这种情况下,人们往往希望知道光斑的具体轮廓。现有的光斑轮廓测量技术主要可分为以下几类:扫描法、感光法、烧蚀法和阵列探测法。但在现有的工艺水平下,以上方法应用于微光斑的测量时,难以对尺寸极微小的光斑进行直接测量,或者精度很低。
3.光斑检测的准确性受图像传感器(相机)分辨率影响。现有技术中,图像传感器分辨率的扩展的方法一般是在光学上增加放大镜头进行前置放大,但对于狭窄视场增加放大镜头不一定能布局成功,另外,增加放大镜头需要增加额外成本。若直接更换分辨率更高的图像传感器,选型耗时并且增加成本。故利用现有设备进行光斑检测时,并不能够准确计算光斑轮廓并给出相关曲线以描述光斑形貌,因此,在现有光斑检测设备分辨率受限的情况下,如何准确计算出光斑轮廓,是本领域技术人员亟需解决的问题。
技术实现要素:
4.本发明的目的在于提供一种光斑轮廓的检测方法,以实现光斑轮廓的高精度检测。
5.为达到上目的,本发明提供一种光斑轮廓的检测方法,包括:
6.光源产生目标光斑并投射在图像传感器的视场范围内;
7.运动台载动所述图像传感器按一设定路线进行步进,并在每一步进位置进行图像采集;以及
8.对采集的图像进行补偿整合。
9.可选的,所述运动台的精度p和所述图像传感器当前的分辨率r满足关系:r/p》n,其中,n≥1。
10.可选的,补偿整合后目标光斑的精度的缩放倍率为n,1≤n≤n,所述图像传感器采集的图像的帧数为n2。
11.可选的,所述图像传感器采集的图像由像素坐标(image
x
,imagey)来表征,所述运动台上设置有运动台坐标,所述运动台坐标(ws
x
,wsy)和所述像素坐标(image
x
,imagey)的关系为:
[0012][0013]
或者,
[0014]
可选的,对采集的图像进行补偿整合包括:
[0015]
设图像传感器的视场大小为width*height,第i帧采集的图像的数据为:
[0016]
image data[i][width*height]
[0017]
其中,i∈[0,n2),
[0018]
设(j,k)表示单帧图像数据坐标,其中,j∈[0,width),k∈[0,height),
[0019]
补偿整合后的图像的数据为:
[0020]
combination image data[k*n+i/n][j*n+i%n]=image data[i][j][k]。
[0021]
可选的,对采集的图像进行补偿整合后还包括,对补偿整合的图像进行检测以获得目标光斑的轮廓。
[0022]
可选的,所述运动台的运动精度小于400nm。
[0023]
可选的,所述目标光斑的大小为3mm*0.1mm或0.1mm*0.1mm。
[0024]
可选的,所述图像传感器的分辨率为4.65um。
[0025]
可选的,所述图像传感器为ccd或cmos。
[0026]
综上,本发明提供一种光斑轮廓的检测方法,包括光源产生目标光斑并投射在图像传感器的视场范围内,运动台载动所述图像传感器按一设定路线进行步进,并在每一步进位置进行图像采集,然后对采集的图像进行补偿整合。本发明通过运动台载动图像传感器进行图像采集,通过补偿整合形成高分辨率图像,间接提高了图像传感器的分辨率,实现光斑轮廓的高精度检测。进一步的,本发明提供的光斑轮廓的检测方法在现有光斑轮廓的检测系统的基础上实现光斑轮廓的检测,不需要增加额外硬件,节约了检测成本。
附图说明
[0027]
图1为一光斑轮廓的检测系统的结构示意图;
[0028]
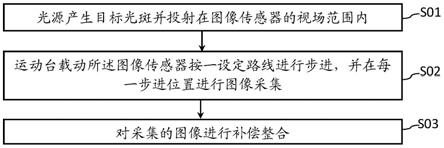
图2为本发明一实施例提供的光斑轮廓的检测方法的流程图;
[0029]
图3a至图3h为运动台的步进的设定路线图;
[0030]
图4为运动台的单向步进的路线图;
[0031]
图5a至图5c为图像传感器采集的图像数据进行移位填充的示意图;
[0032]
图6a为补偿整合前图像传感器采集的单张目标光斑图像的轮廓,图6b为补偿整合后获得的目标光斑图像的轮廓;
[0033]
图7a补偿整合前图像传感器采集的单张实物的图像,图7b为补偿整合后获得实物的图像;
[0034]
图8a为图像传感器分辨率增强前后测量获得目标光斑的长边轮廓数据;
[0035]
图8b为图像传感器分辨率增强前后测量获得目标光斑的短边轮廓数据。
[0036]
其中,附图标记为:
[0037]
110-上位机控制中心;111-运动台控制单元;112-测量控制单元;113-光源单元;114-运动台;115-目标光斑;116-图像传感器。
具体实施方式
[0038]
以下结合附图和具体实施例对本发明的光斑轮廓的检测方法作进一步详细说明。根据下面的说明和附图,本发明的优点和特征将更清楚,然而,需说明的是,本发明技术方案的构思可按照多种不同的形式实施,并不局限于在此阐述的特定实施例。附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0039]
在说明书中的术语“第一”、“第二”等用于在类似要素之间进行区分,且未必是用于描述特定次序或时间顺序。要理解,在适当情况下,如此使用的这些术语可替换,例如可使得本文所述的本发明实施例能够以不同于本文所述的或所示的其他顺序来操作。类似的,如果本文所述的方法包括一系列步骤,且本文所呈现的这些步骤的顺序并非必须是可执行这些步骤的唯一顺序,且一些所述的步骤可被省略和/或一些本文未描述的其他步骤可被添加到该方法。若某附图中的构件与其他附图中的构件相同,虽然在所有附图中都可轻易辨认出这些构件,但为了使附图的说明更为清楚,本说明书不会将所有相同构件的标号标于每一图中。
[0040]
图1为一光斑精度的检测系统的结构示意图,参考图1所示,所述检测系统包括运动台控制单元111,测量控制单元112及光源单元113,且运动台控制单元111、测量控制单元112及所述激光器单元113均与上位机控制中心110连接。其中,所述运动台控制单元111用于控制运动台114在水平方向上运动,所述光源单元113用于发射待检测的目标光斑115,所述测量控制单元112用于控制图像传感器(ccd)116进行图像采集。示例性的,所述运动台114的运动精度p小于400nm,所述激光光斑的尺寸为0.1mm*0.1mm,所述图像传感器(ccd)115当前的分辨率r为4.65um。根据当前目标光斑形状,我们可以知道,目前目标光斑尺寸下的像素个数为:
[0041]
0.1mm/4.65um=21.5
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1-1)
[0042]
计算可知,当前采集计算的像素个数才22个,极大的制约了测量精度,并不能够准确计算光斑轮廓并给出相关曲线以描述光斑形貌。为解决上述问题,本发明提供一种光斑精度检测方法,本发明提供的光斑轮廓的检测方法,通过运动台载动图像传感器按设定路线步进,并将每一步进位置采集的图像进行补偿整合,间接提高了图像传感器的分辨率,实现光斑轮廓的高精度检测。进一步的,本发明提供的光斑轮廓的检测方法在现有设备的基础上实现光斑轮廓的检测,节约了检测成本。
[0043]
图2为本发明一实施例提供的光斑轮廓的检测方法的流程图,如图2所示,本实施例提供的光斑轮廓的检测方法包括:
[0044]
s01:光源产生目标光斑并投射在图像传感器的视场范围内;
[0045]
s02:运动台载动所述图像传感器按一设定路线进行步进,并在每一步进位置进行图像采集;以及
[0046]
s03:对采集的图像进行补偿整合。
[0047]
具体的,参考图1所示,执行步骤s01,光源产生目标光斑并投射在图像传感器的视场范围内。本实施例中,所述光源为激光器产生的激光光源,所述激光光源进行相应整形以产生目标光斑115。可选的,所述目标光斑115的尺寸为3mm*0.1mm或0.1mm*0.1mm。所述图像传感器116可以为互补金属氧化物半导体(cmos,complementary metal oxide semiconductor)或电荷耦合器件(ccd,charge coupled device),优选的,本实施例中,所述图像传感器116为ccd。所述运动台114为高精度运动台,例如,所述运动台114的运动精度为小于400nm。所述运动台114载动图像传感器116运动到可以承接所述目标光斑115的位置,使目标光斑115在ccd视场范围内,优选的,使目标光斑115在ccd视场的中心附近,获取此时的图像数据并进行保存。
[0048]
接着,执行步骤s02,运动台的载动所述图像传感器按一设定路线进行步进,并在
每一步进位置进行图像采集。其中,所述运动台的精度p和所述图像传感器当前的分辨率r满足关系:r/p》n,其中,n≥1,n越大,后续图像传感器的分辨率提高倍数的空间越高。本实施例中,设经后续图像补偿整合后,所述图像传感器的分辨率按一设定倍率n进行缩放,1≤n≤n。示例性的,根据图像传感器当前分辨率r=4.65um进行精度划分,可以按照精度能整除n=3进行倍率缩放,提高精度至1.55um,即经过补偿整合后目标光斑轮廓的精度的放大倍率为3。在本发明其他实施例中,也可以按照精度能整除n=3进行倍率缩放,提高精度至0.93um,当然,本领域技术人员可以根据自身需要进行设计,本发明在此不作限定。需要说明的是,不同的倍率缩放导致后续的图像采集的次数相应也不同,n倍率缩放,后续所述图像传感器采集的次数为n2,即采集的图像的帧数为n2,由于图像采集的次数增加,导致整体的光斑精度的测量相比而言有了一定的耗时。
[0049]
所述图像传感器采集的图像由像素坐标(image
x
,imagey)来表征,每一个像素坐标所含信息则为光斑轮廓检测主要数据信息的来源,所以,所测的目标光斑所占信息越多,测量精度越高。相应的,所述运动台上设置有运动台坐标,所述运动台坐标(ws
x
,wsy)和所述像素坐标(image
x
,imagey)的关系为:
[0050]
或者
[0051]
本实施例中,n大于1,由公式1-1可知,21.5满足高分辨步进需求,此时,运动台坐标系需和图像传感器的像素坐标系保持一致。图3a至图3h为运动台步进的设定路线如,本实施例中,运动台按图3a所示的路线进行步进,且以2*2shot图像步进进行操作,具体如下:运行台沿水平方向步进r/3,进行图像采集和保存,继续步进r/3后再次采集图像和保存;当水平向采集完成后,垂直向下步进r/3,然后进行图像采集和保存;重复上述过程直接采集满足9张图片。
[0052]
需要说明的是,上述图像采集过程中运动台步进路线可以按如图3a所示进行,也可以是满足该过程所需步进位置点的其他路线。示例性的,对于大小为3mm*0.1mm的目标光斑,运动台承载图像传感器可以采用如图3a至图3h的步进路线进行图像采集,也可以采用如图4所示的单向步进路线进行图像采集。
[0053]
接着,执行步骤s03,对采集的图像进行补偿整合。对于采集好的图像数据,按照如下原理进行补偿:按照图3a步进路线,单帧图像数据的每一个像素进行位移,内部数据进行移位填充,即根据采集的每一帧图像所对应的运动台的坐标位置,对图像进行分解补偿。例如,运动台按3a步进路线位移,并将在第一步进点(起始点)采集的图像填充在像素坐标系,如图5a所示,运动台按3a步进路线继续步进r/3(1/3pixel shift)后,再将在r/3步进后采集的图像填充在像素坐标系,如图5b所示,依次按按3a步进路线位移,将每一步进点采集的图像(9frame)依次进行移位填充,获得最终整合(combination)数据如图5c所示。
[0054]
具体的,设当前图像传感器的视场大小为width和height,按照上述路径以及方法补偿。
[0055]
第i帧采集的图像的数据为image data[i][width*height],其中,i∈[0,n2),设补偿整合后的图像的数据为combination image data[n*n*width*height]。
[0056]
再设(j,k)表示当前单帧图像数据的坐标,其中,j∈[0,width),k∈[0,height),
[0057]
显然,对于补偿整合后的图像的数据为:
[0058]
combination image data[k*n+i/n][j*n+i%n]=image data[i][j][k]。
[0059]
接着,对补偿整合的图像进行检测以获得目标光斑的轮廓,并实现分辨率提高。
[0060]
图6a为补偿整合前图像传感器采集的单张目标光斑图像的轮廓,图6b为补偿整合后获得的目标光斑图像的轮廓,图7a补偿整合前图像传感器采集的单张实物的图像,图7b为补偿整合后获得实物的图像。对比图6a和图6b、图7a和图7b,可以看出,采用本实施例提供的图像补偿整合方案,图像传感器的分辨率得到极大的提高。
[0061]
图8a为图像传感器分辨率增强前后测量获得目标光斑的长边(long units)轮廓数据,其中,曲线1是分辨率增强前目标光斑的长边的轮廓数据,曲线2为分辨率增强后的目标光斑的长边的轮廓数据。图8b为图像传感器分辨率增强前后测量获得目标光斑的短边(lateral units)轮廓数据,其中,曲线3是分辨率增强前目标光斑的短边的轮廓数据,曲线4为分辨率增强后的目标光斑的短边的轮廓数据。以长边为例说明:曲线2体现分辨率增强后的目标光斑的轮廓边缘,边缘形状更加明显,轮廓更加分明,能够十分完备的展现出目标光斑长边轮廓;曲线1的则是体现分辨率增强前目标光斑的轮廓边缘,整体形状较为平滑,看不出边缘轮廓具体形状。另外,根据当前像素值,去掉半影区域影响,取像素区间100~2050,共计1950个像素,则轮廓大小为1950/3*4.65um=3022.5um=3.0225mm,而分辨率增强之前的计算结果为720*4.65=3.348mm,可以看出,增强前的半影区域不明显,主体轮廓形状不清晰,按照之前的计算结果目标光斑长度精度较低。即采用本法实施提供的光斑精度检测方法,分辨率增强后的目标光斑的轮廓测量精度更高,并且目标光斑越小越具有优势。
[0062]
本实施例采用上述图像补偿整合方法,在现有光斑轮廓的检测系统的基础上,不增加额外硬件成本,通过控制运动台步进运动,采集多帧图像并通过补偿整合形成高分辨率图像,间接提高了图像传感器的分辨率,提高光斑轮廓计算的准确性,尤其是解决了检测过程中小光斑轮廓模糊不清的问题。
[0063]
本发明提供一种光斑轮廓的检测方法,包括光源产生目标光斑并投射在图像传感器的视场范围内,运动台载动所述图像传感器按一设定路线进行步进,并在每一步进位置进行图像采集,然后对采集的图像进行补偿整合。本发明通过运动台载动图像传感器进行图像采集,通过补偿整合形成高分辨率图像,间接提高了图像传感器的分辨率,实现光斑轮廓的高精度检测。进一步的,本发明提供的光斑轮廓的检测方法在现有光斑轮廓的检测系统的基础上实现光斑轮廓的检测,不需要增加额外硬件,节约了检测成本。
[0064]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1