基于毫米波雷达相位测距的语音重构方法与流程
[0001]
本发明属于语音重构领域,具体涉及一种基于毫米波雷达相位测距的语音重构方法。
背景技术:
[0002]
真实声学环境下,目标语音容易受到人声、背景声音的干扰。无论在日常生活中,还是在军事领域,都迫切需要一种噪声背景下的语音复原手段。语音重构即是通过各种传感器捕获感兴趣的语音内容,以最大程度地恢复出原始的语音信号。
[0003]
目前拾取声音的常用传感器是各类麦克风阵列,麦克风的原理是由声音的振动传到麦克风的振膜上,推动里边的磁铁形成变化的电流,实现物理信号到电信号的转变。但是麦克风阵列在工作的过程中无法分离多个声源,只能被动接收多个声源信息在阵元处的混合叠加。
[0004]
使用毫米波雷达相位测距的语音重构方法,把握产生声音的本质原理,即声音是由物体的振动产生的,主动探测声源目标的微弱振动信息,并从振动信息中恢复出原始语音,避免了声音在传播过程中引入干扰,极大地提高了语音重构的质量。
技术实现要素:
[0005]
本发明要解决的问题是传统麦克风阵列只能被动接收多个声源在阵元处的叠加信息,无法分离出独立声源信息的问题。
[0006]
本发明的主要思路是针对麦克风阵列无法分离多个声源信息的问题,提出一种基于毫米波雷达相位测距的语音重构方法。该方法将声源发出声音的过程建模为一个散射点的振动过程,使用雷达相位测距的方法精细采集声源目标的振动信息,并由此重构出声源目标所发出的语音信息。
[0007]
本发明解决其技术问题所采取的技术方案是:一种基于毫米波雷达相位测距的语音重构方法,包括以下步骤:
[0008]
s1使用离散傅里叶变换方法获取声源目标的高分辨一维距离像序列:
[0009]
雷达采用了宽频带信号后,距离分辨率可大大提高。目标回波为沿波束射线的相同距离单元里的子回波作向量相加。通常该回波的幅度分布称为一维实距离像,简称一维距离像(保铮,邢孟道,王彤.雷达成像技术[m].北京:电子工业出版社,2005)。假设在一个脉冲重复周期内,雷达发射的复信号可以表示为:
[0010][0011]
其中,f
c
为载波频率,t为脉内快时间,β为线性调频率,为初始相位,b为雷达发射带宽,prt为脉冲重复周期。
[0012]
假设声源处目标与雷达的相对径向距离为r(τ),τ=m*prt,m∈z
+
表示脉冲序号,且在一个脉冲重复周期内保持不变,则声源目标的回波信号可以表示为:
[0013][0014]
其中,ρ为回波信号幅度,主要受到目标rcs和传输损耗的影响,c为光速。解线性调频后的中频信号可以表示为:
[0015][0016]
其中,(
·
)
*
表示取共轭运算,对(3)式做离散傅里叶变换,即可得声源目标的一维距离像序列表达式:
[0017][0018]
式中,n∈1,2,3
…
n,n为离散傅里叶变换点数,也即一维距离像序列长度,δf为变换后的频谱间距,(4)式可简写为(刘会衡,张军.再谈数字信号处理课程中几种变换的关系[j].高师理科学刊,2020,40(05):84-91.)
[0019][0020]
由(5)式可知,中频信号的频率为考虑到中频信号的相位为由于声源目标的振动信息包含在中频信号的相位之中,根据相位信息测距的方法可以获得很高的精度。
[0021]
s2基于单元平均恒虚警(cell average constant false alarm rate,ca-cfar)检测器的一维距离像序列峰值点检测:
[0022]
根据傅里叶变换理论可知,一个时域有限的正弦信号在频域会产生一个尖峰,该尖峰处的位置与正弦波的频率相对应,峰值点的相位与正弦波的初始相位相对应。为了从一维距离像序列中准确提取出峰值点的相位值,使用ca-cfar检测器对一维距离像序列做峰值点检测。具体分为以下步骤:
[0023]
s2.1选择参考单元并计算背景均值估计
[0024]
在检测一维距离像序列的第k个序列值s
if
(k)时,其背景均值估计计算为
[0025][0026]
其中,l为单侧参考单元个数;
[0027]
s2.2计算检测门限并检测峰值点
[0028]
根据背景均值估计计算检测门限
[0029][0030]
其中k为门限乘子,取值方式可参考(吴顺君,梅晓春.雷达信号处理和数据处理技术[m].北京:电子工业出版社,2008);保存大于s
if
(k)>u
0
(k)对应的k值,利用公式(5),即可
得到此一维距离像的峰值点
[0031][0032]
s3峰值点相位信息提取与声源音频信号重构:
[0033]
(8)式表示每个一维距离像序列的峰值点数值,其相位项包含有声源目标的振动信息r(τ),可通过求其相位信息进而解出声源目标的振动信息,具体分为以下步骤:
[0034]
s3.1提取峰值点相位信息并相位解模糊:
[0035]
直接对(8)式取相位,可得
[0036][0037]
(9)式中α表示相位模糊数。在提取峰值点相位的过程中使用了反正切函数arctan(
·
),这导致求得的相位值总是处于[-π,π]之间,即存在产生相位模糊的可能性。
[0038]
毫米波雷达对声源目标的探测过程可以视为一个对雷达与声源目标径向距离变化的采样过程,采样间隔为脉冲重复周期prt,采样频率为脉冲重复频率prf,根据内奎斯特采样定理可知,
[0039]
prf≥2 max(f
r
)
ꢀꢀ
(10)
[0040]
其中,为声源目标的振动频率,一般取值为20~20000hz(蒋辉,李昱辉,郭小齐.基于声波振动的传感器通信技术研究[j].中国新通信,2020,22(02):16-17.)。在满足(10)式的条件下,相邻两次距离采样的差值对应的相位值为:
[0041][0042]
若由(9)式恢复出的p
peak
(m)的前后相邻值差的绝对值大于则认为产生了模糊,需要相位解模糊处理(王展,李双勋,吴京.现代数字信号处理[m].长沙:国防科技大学出版社,2016)。
[0043]
相位解模糊之后的相位序列为
[0044]
p
*peak
(m)=unwrap(p
peak
(m))
ꢀꢀ
(12)
[0045]
s3.2声源振动信息提取与语音复原
[0046]
由(12)式可解出声源目标与雷达的相对径向距离为
[0047][0048]
声源目标的振动引起空气的振动从而产生声波并向远处传播,由此便产生了声音。因此声波的各项参数与声源目标的振动保持一致,即
[0049][0050]
其中sound(m)为声波幅度随采样时刻m的变化,即恢复出的音频信息。
[0051]
受限于雷达硬件设备的实际工作性能,由式(14)恢复出的音频信息中往往参杂有噪声,严重影响了声源的复原效果,此时可以采用语音增强的方法(吉慧芳.改进相位谱信息及相位重构的语音增强算法研究[d].太原理工大学,2019.)对噪声加以滤除。
[0052]
本发明取得的有益效果为:通过本发明可以实现高质量的语音信息重构,在多声源环境下,使用毫米波频段的雷达可以主动探测声源目标,精确获取声源目标的一维距离像,并检测出峰值点相位信息,进而得到声源目标的振动信息,并由此重构出声源目标的音频信息,有效排除了其他声源的干扰。
附图说明
[0053]
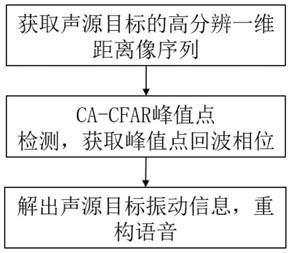
图1本发明的实施流程图;
[0054]
图2实验场景示意图;
[0055]
(a)使用音响播放提前准备好的目标语音,干扰源播放干扰语音;
[0056]
(b)使用毫米波雷达对音响振动进行采样,将采下来的信号传输到pc机之内进行后续的信号处理;
[0057]
图3混频后的中频信号图;
[0058]
图4声源目标的高分辨一维距离像序列;
[0059]
图5ca-cfar检测器结构示意图;
[0060]
图6峰值点相位信息提取结果;
[0061]
图7振幅解模糊之后的结果;
[0062]
图8重构语音样本结果:(a)含噪语音样本;(b)增强后的语音样本。
具体实施方式
[0063]
下面结合附图对本发明进行进一步说明:
[0064]
图1为本发明总处理流程。本发明所述一种基于毫米波雷达相位测距的语音重构方法,包括以下步骤:
[0065]
s1使用离散傅里叶变换方法获取声源目标的高分辨一维距离像序列;
[0066]
s2基于单元平均恒虚警(ca-cfar)检测器的一维距离像序列峰值点检测;
[0067]
s3峰值点相位信息提取与声源音频信息重构。
[0068]
图2(a)、(b)为实验场景示意图:使用音响播放提前准备好的目标语音,干扰源播放干扰语音。使用毫米波雷达对音响振动进行采样,将采下来的信号传输到pc机之内进行后续的信号处理。雷达工作参数如下:中心频率为77ghz,带宽为4ghz,脉宽为29.6μs,每秒发射20000个脉冲。
[0069]
图3为混频之后的中频信号图,混频过程在毫米波雷达硬件设备中完成,图中示出了前10个中频信号波形。对混频之后的中频信号做离散傅里叶变换即可得到声源目标的一维距离像序列,如图4所示。
[0070]
如图5所示为ca-cfar检测器的结构示意图。在峰值点检测过程中,一维距离像序列被输送到由(2l+1)个延迟单元构成的延迟线上,d为被检测单元,d的两侧各l个单元为参考单元。按照(6)式和(7)式求出背景均值及门限u
0
(k)。在实际检测过程中,ca-cfar检测器的工作参数为:参考单元长度l=10,门限乘子k=5。
[0071]
在检测出每个一维距离像的峰值点位置后,求出每个峰值点的相位值,如图6所示为一维距离像峰值点相位图,解模糊之后的相位变化图如图7所示。根据式(14)和式(15)可得最终恢复出的音频信息如图8(a)所示,降噪之后的结果如图8(b)所示。
[0072]
综上所述,本方法可以在多声源背景下主动探测声源目标,精确捕获声源目标的振动信息,并由此重构出所需音频信息,排除了其余声源的干扰,具有较高的应用价值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1