一种缺陷检测装置及方法与流程
[0001]
本发明实施例涉及缺陷检测技术领域,尤其涉及一种缺陷检测装置及方法。
背景技术:
[0002]
随着工业自动化、智能化的深入及普及,使用自动光学检测设备(auto optical inspection,aoi)替代传统的人工目检,已成为技术发展趋势。aoi设备凭借其快速、精确的缺陷识别定位能力,在汽车、医药、交通、半导体等领域广泛使用。
[0003]
目前,现有的aoi设备通常包括光学成像系统、载物台、物料传输系统等。其中光学成像系统包括照明单元、成像物镜和探测器等。通常aoi设备检测过程中,需要将待测面调节到最佳焦面,以获得清晰的图片,便于识别待测表面的缺陷。然而在实际应用中,一些样品需要采用多种照明模式(例如明场照明、暗场照明、背光照明等)分别进行检测,耗时较长。
技术实现要素:
[0004]
本发明提供一种缺陷检测装置及方法,以实现同时进行多种照明模式的检测,提升检测效率。
[0005]
为实现上述目的,本发明第一方面实施例提出了一种缺陷检测装置,包括:
[0006]
载物台,所述载物台包括相对的第一表面和第二表面,其中,所述第一表面用于承载待测样品,所述待测样品包括相对的第三表面和第四表面,所述待测样品的第四表面与所述载物台的第一表面邻近;
[0007]
第一光源单元,用于出射第一光束,所述第一光束垂直入射至所述待测样品的第三表面上形成第一照明视场;
[0008]
第二光源单元,用于出射第二光束,所述第二光束以预设角度斜入射至所述待测样品的第三表面上形成第二照明视场,其中,所述预设角度大于0
°
小于90
°
;
[0009]
第三光源单元,用于出射第三光束,所述第三光束穿透所述载物台并垂直入射至所述待测样品的第四表面形成第三照明视场,第一照明视场、第二照明视场和第三照明视场相互分离且不交叠;
[0010]
成像物镜,位于所述待测样品远离所述载物台的一侧,用于收集所述第一照明视场、所述第二照明视场和所述第三照明视场在所述待测样品的表面产生对应的第一光信号、第二光信号和第三光信号;
[0011]
包含多个探测器阵列的探测单元,位于所述成像物镜远离所述待测样品的一侧,所述探测单元包括第一探测器阵列、第二探测器阵列和第三探测器阵列,分别对应探测所述第三光信号、所述第二光信号和所述第一光信号,用于根据所述第三光信号、所述第二光信号和所述第一光信号产生第三图像、第二图像和第一图像;
[0012]
控制器,所述控制器分别与所述探测器和所述载物台电连接,所述控制器控制所述载物台承载所述待测样品沿第一方向移动,所述控制器还用于根据所述第一图像、所述
第二图像和所述第三图像对所述待测样品进行缺陷识别。
[0013]
根据本发明实施例提出的缺陷检测装置,通过设置第一光源单元、第二光源单元和第三光源单元,同时照射待测样品,使得成像物镜分别采集第一照明视场、第二照明视场和第三照明视场在待测样品的表面产生对应的第一光信号、第二光信号和第三光信号,进而,探测器中的第三探测器阵列根据所述第一光信号产生第一图像,第二探测器阵列用于根据所述第二光信号产生第二图像,第一探测器阵列用于根据所述第三光信号产生第三图像,控制器根据所述第一图像、所述第二图像和所述第三图像对所述待测样品进行缺陷识别,从而实现了可同时采集明场照明、暗场照明和背光照明三种照明模式下的缺陷图像,可同时根据缺陷图像对待测样品进行明场照明、暗场照明和背光照明三种照明模式下的缺陷进行识别。
[0014]
可选地,所述第一光源单元、所述第二光源单元和所述第三光源单元同时照射所述待测样品,并且所述第一照明视场、所述第二照明视场和所述第三照明视场均为线性照明视场。
[0015]
可选地,所述第一探测器阵列、所述第二探测器阵列和所述第三探测器阵列等间距平行排列布置,且每个探测器阵列的宽度相等。
[0016]
可选地,每个所述光源单元出射的光束的顶部照明宽度均大于每个所述探测器阵列的宽度的1/m倍,其中,m为所述成像物镜的放大倍率。
[0017]
可选地,每个所述光源单元出射的光束的底部照明宽度均小于每个所述探测器阵列之间的间距的1/m倍,其中,m为所述成像物镜的放大倍率。
[0018]
可选地,所述第一光源单元包括:第一光源、第一透镜和半反半透镜,所述第一光源出射的第一光束经过所述第一透镜形成第一线性光束,所述第一线性光束经过所述半反半透镜垂直入射至所述待测样品的第三表面;
[0019]
所述第二光源单元包括:第二光源和第二透镜,所述第二光源出射的第二光束经过所述第二透镜形成第二线性光束,所述第二线性光束以预设角度入射至所述待测样品的第三表面;
[0020]
所述第三光源单元包括:第三光源和第三透镜,所述第三光源出射的第三光束经过所述第三透镜形成第三线性光束,所述第三线性光束垂直入射自所述载物台的第二表面至所述待测样品的第四表面。
[0021]
可选地,所述第一透镜、所述第二透镜和所述第三透镜均为角锥棱镜。
[0022]
为实现上述目的,本发明第二方面实施例提出了一种缺陷检测方法,包括以下步骤:
[0023]
上载待测样品至载物台;
[0024]
调节所述载物台,使所述待测样品处于成像物镜的最佳焦面;
[0025]
定义检测起始位置;
[0026]
控制器控制载物台以起始位置沿第一方向开始移动,同时控制包含多个探测器阵列的探测单元以起始位置开始扫描所述待测样品,其中,所述探测单元包括第一探测器阵列、第二探测器阵列和第三探测器阵列,所述第三探测器阵列用于获取第一光源单元照射待测样品的第一图像、所述第二探测器阵列用于获取第二光源单元照射待测样品的第二图像、所述第一探测器阵列用于获取第三光源单元照射待测样品的第三图像;
[0027]
控制器根据所述第一图像、所述第二图像和所述第三图像对所述待测样品进行缺陷识别。
[0028]
根据本发明实施例提出的缺陷检测方法,首先,上载待测样品至载物台;接着调节载物台,使待测样品处于成像物镜的最佳焦面;接着定义检测起始位置;接着控制载物台以起始位置沿第一方向开始移动,同时控制包含多个探测器阵列的探测单元以起始位置开始扫描待测样品,其中,探测单元包括第一探测器阵列、第二探测器阵列和第三探测器阵列,;接着第三探测器阵列用于获取第一光源单元照射待测样品的第一图像、第二探测器阵列用于获取第二光源单元照射待测样品的第二图像、第一探测器阵列用于获取第三光源单元照射待测样品的第三图像;最后控制器根据第一图像、第二图像和第三图像对待测样品进行缺陷识别,从而实现了同时获取明场照明、暗场照明和背光照明三种照明模式下的缺陷图像,并实现了同时对待测样品进行明场照明、暗场照明和背光照明三种照明模式下的缺陷识别。
[0029]
可选地,所述控制载物台以起始位置沿第一方向开始移动,同时控制包含多个探测器阵列的探测单元以起始位置开始扫描所述待测样品包括:
[0030]
在t0时刻,所述第三探测器阵列开始获取所述第一图像,延时t
d
=s0/m/v后,所述第二探测器阵列开始获取所述第二图像,延时2t
d
之后,所述第一探测器阵列开始获取所述第三图像,其中,所述第一探测器阵列、所述第二探测器阵列和所述第三探测器阵列等间距平行排列布置,s0为探测器阵列之间的间距,m为成像物镜的放大倍率,v为载物台的运动速度。
[0031]
可选地,所述控制器根据所述第一图像、所述第二图像和所述第三图像对所述待测样品进行缺陷识别包括:
[0032]
采用图像阈值分割法对所述第一图像、所述第二图像和所述第三图像进行处理,以对所述待测样品进行缺陷识别。
附图说明
[0033]
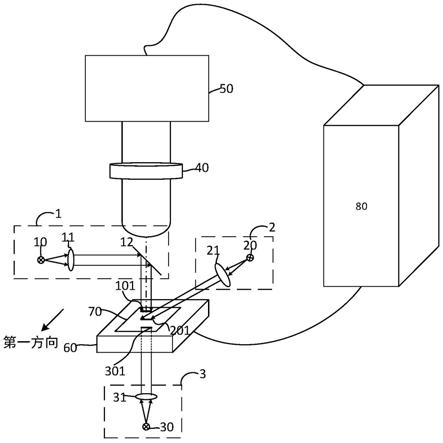
图1为本发明实施例的缺陷检测装置的结构示意图;
[0034]
图2是本发明一个实施例的缺陷检测装置的结构示意图;
[0035]
图3是本发明实施例的缺陷检测装置中第一光源单元、第二光源单元和第三光源单元的光强分布示意图;
[0036]
图4是本发明一个实施例的缺陷检测装置中第一透镜、第二透镜或第三透镜的结构示意图;
[0037]
图5是本发明实施例的缺陷检测方法的流程图;
[0038]
图6是本发明一个实施例的缺陷检测方法的流程图;
[0039]
图7是本发明又一个实施例的缺陷检测方法的流程图。
具体实施方式
[0040]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0041]
下面结合附图来描述本发明实施例提出的缺陷检测装置及方法。
[0042]
图1为本发明实施例的缺陷检测装置的结构示意图。该缺陷检测装置,包括:载物台60、第一光源单元1、第二光源单元2、第三光源单元3、成像物镜40、包含多个探测器阵列的探测单元50和控制器80。
[0043]
其中,载物台60包括相对的第一表面和第二表面,其中,第一表面用于承载待测样品70,待测样品70包括相对的第三表面和第四表面,待测样品70的第四表面与载物台60的第一表面邻近;第一光源单元1,用于出射第一光束,第一光束垂直入射至待测样品70的第三表面上形成第一照明视场101;第二光源单元2,用于出射第二光束,第二光束以预设角度斜入射至待测样品70的第三表面上形成第二照明视场201,其中,预设角度大于0
°
小于90
°
;第三光源单元3,用于出射第三光束,第三光束301穿透载物台60并垂直入射至待测样品70的第四表面形成第三照明视场301;其中,第一照明视场101、第二照明视场201和第三照明视场301相互分离且不交叠;第一照明视场101、第二照明视场201和第三照明视场301在待测样品表面相应区域分别产生对应的第一光信号、第二光信号和第三光信号;成像物镜40,位于待测样品70远离载物台60的一侧,用于收集第一光信号、第二光信号和第三光信号;包含多个探测器阵列的探测单元50,位于成像物镜40远离待测样品70的一侧,探测单元50包括第一探测器阵列a1、第二探测器阵列a2和第三探测器阵列a3,分别对应探测第三光信号、第二光信号和第一光信号,用于产生第三图像、第二图像和第一图像;控制器80分别与探测单元50和载物台60电连接,控制器80控制载物台60承载待测样品70沿第一方向移动;控制器80还用于根据第一图像、第二图像和第三图像对待测样品进行缺陷识别。
[0044]
需要说明的是,第一光源单元1、第二光源单元2和第三光源单元3同时照射待测样品70。其中,待测样品70可以为硅片,第一光源单元1为明场照明光源,主要检测硅片表面的油污等污染物,第二光源单元2为暗场照明光源,主要检测硅片中的颗粒、凸起或划痕等缺陷,第三光源单元3为背光照明光源,主要检测硅片中通孔中的毛刺、边缘缺陷或背部缺陷等缺陷。
[0045]
其中,载物台60可以为透明材质的载物台,也可以为在载物台60的相应位置设置通孔,以使得第三光源单元3的照明光束可以达到待测样品70。
[0046]
第二光源单元2出射的第二光束201以预设角度斜入射至待测样品70的第三表面上,例如待测样品70的上表面,其中,预设角度优选为45
°
。如果待测样品70的上表面有颗粒或者凸起等缺陷,可以将该方向的光束散射或反射至成像物镜40,进而使得探测单元50探测到待测样品70的上表面的颗粒或者凸起缺陷。
[0047]
优选地,上述第一照明视场101、第二照明视场201和第三照明视场301均为线性照明视场,且相互分离不交叠。控制器80控制载物台60沿第一方向移动,探测单元50中的第一探测器阵列a1探测到第三光源单元3照射的待测样品70的下表面的缺陷,第二探测器阵列a2探测到第二光源单元2照射的待测样品70的上表面缺陷,第三探测器阵列a3探测到第一光源单元1照射的待测样品70的上表面缺陷,从而产生第一图像、第二图像和第三图像,控制器80根据上述第一图像、第二图像和第三图像对待测样品70进行缺陷识别及统计以完成缺陷检测。
[0048]
如图1至图3所示,包含多个探测器阵列的探测单元50包括第一探测器阵列a1、第二探测器阵列a2和第三探测器阵列a3;第一探测器阵列a1、第二探测器阵列a2和第三探测
器阵列a3等间距平行排列布置,且每个探测器阵列的宽度相等。进一步地,每个光源单元出射的光束的顶部照明宽度均大于每个探测器阵列的宽度的1/m倍,其中,m为所述成像物镜的放大倍率。进一步地,待测样品70表面的第一照明视场101、第二照明视场201和第三照明视场301区域分别经过成像物镜40成像到对应的第三探测器阵列a3、第二探测器阵列a2和第一探测器阵列a1,也即三个探测器阵列可以分别独立的获取三幅图像。
[0049]
可以理解的是,每个光源单元出射的光束入射至待测样品70的表面,如图3所示,中部的光强最强,边缘的光强较中间的光强弱,因此,定义,照明视场中光强大于95%的部分为照明视场的顶部,照明光束中光强小于95%的部分为照明视场的边缘,定义照明视场顶部与照明边缘之和为照明视场的底部。
[0050]
其中,如图2和图3所示,每个探测器阵列的宽度为w0,第一照明视场101的顶部宽度为w1,第二照明视场201的顶部宽度为w2,第三照明视场301顶部宽度为w3,w0、w1、w2、w3之间满足:
[0051]
w1>w0/m、w2>w0/m、w3>w0/m,其中,m为成像物镜的放大倍率,以使得各个照明视场可以覆盖探测器阵列。
[0052]
可选地,每个光源单元形成的照明视场的底部宽度均小于所述探测器阵列之间的间距的1/m倍,其中,m为所述成像物镜的放大倍率。
[0053]
其中,如图2和图3所示,每个探测器阵列之间的间距为s0,第一照明视场101的底部照明宽度为w1+2dw1,第二照明视场201的底部照明宽度为w2+2dw2,第三照明视场301的底部照明宽度为w3+2dw3,其中,s0、w1、dw1、w2、dw2、w3、dw3之间满足:
[0054]
w1+2dw1<s0/m;w2+2dw2<s0/m;w3+2dw3<s0/m,其中,m为成像物镜的放大倍率。
[0055]
由此,通过上述限定可以避免各个光源单元出射的照射在待测样品上的光束之间相互串扰。
[0056]
即言,三种照明模式光源出射的光束照射至待测样品70上的照明视场区域的光强分布如图3所示。例如可以定义三个光束的照明视场最大光强95%以上的区域为照明顶部,从最大光强95%下降到0的区域为照明边缘。因此,为保证照明视场能覆盖对应的探测器阵列,要求三个视场的顶部照明宽度w1、w2和w3均大于w0/m。为避免不同照明模式产生的光相互串扰,同时要求三个照明视场边缘宽度dw1、dw2和dw3满足w1+2dw1<s0/m;w2+2dw2<s0/m;w3+2dw3<s0/m。
[0057]
可选地,如图1所示,第一光源单元1包括:第一光源10、第一透镜11和半反半透镜12,第一光源10出射的第一光束经过第一透镜11形成第一线性光束,第一线性光束经过半反半透镜12垂直入射至待测样品70的第三表面;
[0058]
第二光源单元2包括:第二光源20和第二透镜21,第二光源20出射的第二光束经过第二透镜21形成第二线性光束,第二线性光束以预设角度入射至待测样品70的第三表面;
[0059]
第三光源单元3包括:第三光源30和第三透镜31,第三光源30出射的第三光束经过第三透镜31形成第三线性光束,第三线性光束垂直入射自载物台60的第二表面至待测样品70的第四表面。
[0060]
可选地,如图4所示,第一透镜11、第二透镜21和第三透镜31均为角锥棱镜。
[0061]
从而,光源经过角锥棱镜之后,得到很好的线性光束,从而在待测样品70表面形成线性照明视场,使得探测器可以更好地产生图像。
[0062]
可选地,第一光源10、第二光源20和第三光源30均为led、疝灯、卤素灯或激光光源中的一种。
[0063]
综上所述,根据本发明实施例提出的缺陷检测装置,通过设置同时照射待测样品的第一光源单元、第二光源单元和第三光源单元,结合包含多个探测器阵列的探测单元,使得成像物镜收集第一照明视场、第二照明视场和第三照明视场在待测样品的表面产生对应的第一光信号、第二光信号和第三光信号,进而,探测单元中的第三探测器阵列根据第一光信号产生第一图像,第二探测器阵列用于根据第二光信号产生第二图像,第一探测器阵列用于根据第三光信号产生第三图像,控制器根据第一图像、第二图像和第三图像对待测样品进行缺陷识别,从而实现了可同时采集明场照明、暗场照明和背光照明三种照明模式下的缺陷图像,进而同时根据缺陷图像对待测样品进行明场照明、暗场照明和背光照明三种照明模式下的缺陷识别以完成缺陷检测,从而提高了缺陷检测精度。
[0064]
图5是本发明实施例的缺陷检测方法的流程图。如图5所示,该缺陷检测方法包括以下步骤:
[0065]
s101,上载待测样品至载物台;
[0066]
s102,调节载物台,使待测样品处于成像物镜的最佳焦面;
[0067]
s103,定义检测起始位置;
[0068]
检测起始位置可以为从第一光源单元入射侧进行检测。
[0069]
s104,控制器控制载物台以起始位置沿第一方向开始移动,同时控制包含多个探测器阵列的探测单元以起始位置开始扫描待测样品,其中,探测单元包括第一探测器阵列,第二探测器阵列和第三探测器阵列,第三探测器阵列用于获取第一光源单元照射待测样品的第一图像、第二探测器阵列用于获取第二光源单元照射待测样品的第二图像、第一探测器阵列用于获取第三光源单元照射待测样品的第三图像;
[0070]
s105,控制器根据第一图像、第二图像和第三图像对待测样品进行缺陷识别。
[0071]
可选地,如图6所示,步骤s104包括:
[0072]
s1041,在t0时刻,探测单元中的第三探测器阵列开始获取第一图像,延时t
d
=s0/m/v后,第二探测器阵列开始获取第二图像,延时2t
d
之后,第一探测器阵列开始取第三图像获,其中,第一探测器阵列、第二探测器阵列和第三探测器阵列等间距平行排列布置,s0为探测器阵列之间的间距,m为成像物镜的放大倍率,v为载物台的运动速度。
[0073]
也就是说,t0时刻为初始时刻,即为探测单元开始产生图像的时刻。
[0074]
可选地,如图7所示,步骤s105进一步包括:s1051,采用图像阈值分割法对第一图像、第二图像和第三图像进行处理,以对待测样品进行缺陷识别。
[0075]
综上所述,根据本发明实施例提出的缺陷检测方法,首先,上载待测样品至载物台;接着调节载物台,使待测样品处于成像物镜的最佳焦面;接着定义检测起始位置;接着控制载物台以起始位置沿第一方向开始移动,同时控制包含多个探测器阵列的探测单元以起始位置开始扫描待测样品,其中,探测单元包括第一探测器阵列、第二探测器阵列和第三探测器阵列,;接着第三探测器阵列用于获取第一光源单元照射待测样品的第一图像、第二探测器阵列用于获取第二光源单元照射待测样品的第二图像、第一探测器阵列用于获取第三光源单元照射待测样品的第三图像;最后控制器根据第一图像、第二图像和第三图像对待测样品进行缺陷识别,从而实现了同时获取明场照明、暗场照明和背光照明三种照明模
式下的缺陷图像,并实现了同时对待测样品进行明场照明、暗场照明和背光照明三种照明模式下的缺陷识别,从而提高了缺陷检测精度。
[0076]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1