一种提升机用智能闸中轴传感器的制作方法
[0001]
本发明涉及矿井提升机设备现场安全运行、维护和制动力矩实时在线监控领域,具体是一种提升机用智能闸中轴传感器。
背景技术:
[0002]
矿用提升机是金属矿和煤炭井下开采运输的关键设备,尤其是提升机制动系统制动闸的制动正压力需要维持在安全限度以内才能保证提升机全系统在工作过程中的工作制动和安全紧急制动的安全可靠。
[0003]
以往提升机普通制动闸不能够直观显示制动正压力数值,也不能在线监视并合理调整制动正压力是否到达安全规定范围,从而动态防止制动正压力数值随工作时间而下降,普通制动闸的制动正压力的控制只能依靠制动闸开闸时的闸瓦间隙数值来间接保障制动正压力不下降,但不能知道其数值是否符合安全范围,这种方法也只是一种定性控制措施,不能真正精确解决制动闸制动正压力的动态实测和在线动态调整问题。
技术实现要素:
[0004]
本发明的目的在于提供一种能够随机动态检测制动闸开闸和闭闸时制动正压力真实数据,实现这一目的方法就是在制动闸内设置本发明的提升机用智能闸中轴传感器。
[0005]
本发明的目的是采用以下技术方案来实现。依据本发明提出的
[0006]
一种提升机用智能闸中轴传感器,包括中轴传感器外套,设置在中轴传感器外套腔体内的中轴传感器核心、张紧弹簧、中轴传感器张紧螺钉、连体桥,连体桥上设有传感器信号线穿孔,中轴传感器核心的端部设有传感器抗压头,中轴传感器核心的圆柱面上对称加工二个圆孔,二个圆孔之间形成一个对力敏感的传感器腹板,传感器腹板的二个表面上均布置有至少一个应变片,中轴传感器核心的二个圆孔内设置有用于将信号放大并传输的电路板,应变片与该电路板电性连接;
[0007]
中轴传感器外套内设有用于安装中轴传感器核心的腔体,中轴传感器核心远离传感器抗压头的端部紧贴在连体桥的端面上,连体桥另一端的侧表面上对称设有两个用于放置张紧弹簧的安装腔,中轴传感器张紧螺钉穿过张紧弹簧并通过螺纹连接的方式安装在智能闸筒体上,从而将连体桥、张紧弹簧、中轴传感器核心约束成一体。
[0008]
优选的,传感器抗压头远离连体桥的端部设有抗压垫。
[0009]
优选的,抗压垫外表面呈平面或球面。
[0010]
优选的,传感器抗压头的外表面呈平面或球面。
[0011]
优选的,中轴传感器外套上设有拉紧螺栓连接丝扣。
[0012]
优选的,中轴传感器靠近智能闸筒体的端部设有帽头边,帽头边最大直径圆周上对称设置有多个止转口,止转口内安置有多个用于防止中轴传感器安装在智能闸筒体上时二者发生相对转动的止转螺钉。
[0013]
优选的,止转螺钉为带有丝扣的定位螺钉或不带丝扣的光杆定位销。
[0014]
本发明提出的一种提升机用智能闸中轴传感器具有如下优点:
[0015]
1、本发明的中轴传感器,在安装到提升机智能闸上时,在提升机做运行制动时能够检测到真实的制动正压力,为提升机制动正压力的判断提供了一种直接的定量手段,有助于直观快速了解提升机制动正压力情况,从而可以迅速做出判断及调整,保证提升机的制动安全。
[0016]
2、本发明通过对制动闸的真实制动正压力的直接检测并经计算机智能化分析将智能闸实测的制动正压力延伸到验证提升机系统运行状态下的总制动力矩以判断其是否符合国家颁布的有关安全规范要求,对矿山运行设备工程实践特别有着现实意义。
[0017]
以上说明仅是本发明技术方案的概述,为了能更清楚了解本发明的技术手段,可依照说明书的内容予以实施,并且为让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
[0018]
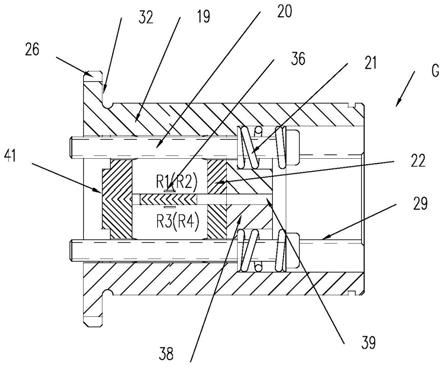
图1是中轴传感器的剖视图。
[0019]
图2是中轴传感器的立体剖视图。
[0020]
图3是中轴传感器核心的主视图。
[0021]
图4是中轴传感器核心的立体示意图。
[0022]
图5是本实施例中中轴传感器外套的立体剖视图。
[0023]
图6是提升机的主视图。
[0024]
图7是提升机的俯视图。
[0025]
图8是安装有本实施例中轴传感器的提升机用智能闸的主视图。
[0026]
图9是图8中b-b处的(其中中轴传感器未剖)的剖视图。
[0027]
图10是图8中b-b处的剖视图。
[0028]
图11是智能闸立体示意图。
[0029]
图12是智能闸另一方向的立体示意图。
[0030]
图13是智能闸筒体主视图。
[0031]
图14是智能闸筒体的剖视图。
[0032]
图15是智能闸筒体和中轴传感器的装配示意图。
[0033]
图16是智能闸筒体和中轴传感器的装配的立体剖视图。
[0034]
图17是中轴传感器的检测桥路图。
[0035]
【附图标记】
[0036]
ⅰ-
提升机闸盘,
ⅱ-
智能闸,
ⅲ-
智能闸闸座,
ⅳ-
提升机主轴装置轴承座,
ⅴ-
轴承座支承梁,
ⅵ-
主轴装置卷筒,
ⅶ-
提升机钢丝绳,g-中轴传感器,
[0037]
1-外壳体,2-闸瓦,4-碟簧,5-端盖,6-油缸,7-活塞,8-拉紧螺栓,9-支撑套,10-第一密封圈ⅰ,11-第二密封圈,12-碟簧垫,13-调整螺母,14-油缸盖,15-进油道,16-闸瓦压条,17-闸瓦压紧螺钉,18-油缸盖固定螺钉,19-中轴传感器外套,1901-腔体,20-中轴传感器张紧螺钉,21-张紧弹簧,22-中轴传感器核心,23-抗压垫,26-止转口,27-止转螺钉,28-止转螺钉孔,29-拉紧螺栓连接丝扣,32-帽头边,33-下沉槽,34-智能闸筒体张紧螺钉孔,35-智能闸筒体,36-应变片,37-间隙,38-连体桥,3801-弹簧安装腔,39-传感器信号线穿
孔,40-传感器腹板,41-传感器抗压头。
具体实施方式
[0038]
为更进一步阐述本发明为达成预定目的所采用的技术手段及功效,以下结合附图及较佳实例,对本发明提出的一种提升机用智能闸中轴传感器进行详细说明。
[0039]
在本发明的描述中,需要说明的是,术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或者暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因而不能理解为对本发明的限制。
[0040]
请参阅图6至图13,安装有本发明的提升机用智能闸中轴传感器的智能闸ⅱ被分别固定在智能闸闸座ⅲ的二侧并夹持提升机闸盘ⅰ的左右两侧呈制动状态。
[0041]
智能闸ⅱ包括安装在智能闸闸座ⅲ上的外壳体1、设置在外壳体1内并与外壳体呈滑动连接且内部设有碟簧4的智能闸筒体35,请参阅图9、图10,紧贴智能闸筒体的左侧平面处安装有闸瓦2,闸瓦2与智能闸筒体35通过闸瓦压紧螺钉17和闸瓦压条16紧固成一个整体,外壳体1尾部还通过螺纹连接安装有调整螺母13,闸瓦2安装在智能闸筒体远离外壳体的一侧,智能闸筒体内安装有本发明的提升机用智能闸中轴传感器g。
[0042]
调整螺母13内设置有油缸6,调整螺母13的尾部安装有对油缸进行封闭固定的油缸盖14,油缸盖上设有端盖5,请参阅图8至图10,油缸盖14通过油缸盖固定螺钉18固定安装在油缸6的侧面并挡在调整螺母13的尾部与调整螺母呈旋转滑动接触,油缸6进出油液通过进油道15与液压站控制管路的油液连通,油缸内的活塞7通过油缸盖14封闭在油缸内部同时活塞7可滑动地安装在油缸缸体内部,活塞7的中间被拉紧螺栓8穿过,拉紧螺栓和活塞之间还设置有用于对拉紧螺栓起支撑作用的支撑套9,支撑套与活塞之间通过o型圈进行隔离并实现两者之间的软性连接,拉紧螺栓8穿过活塞中间孔并与中轴传感器g之间通过螺纹连接,拉紧螺栓8与中轴传感器g之间通过螺纹连接产生的预紧力使拉紧螺栓8、支撑套9、活塞7、中轴传感器g及智能闸筒体35连接为一个整体。活塞与油缸之间还设置有用于防止油液渗漏且呈滑动接触的第一密封圈10及第二密封圈11,第一密封圈及第二密封圈的具体位置如图9所示。
[0043]
请参阅图1至图2,一种提升机用智能闸中轴传感器g(以下简称中轴传感器),中轴传感器g的左端一侧设有帽头边32、右端面的中间部分加工有拉紧螺栓连接丝扣29,拉紧螺栓连接丝扣29与拉紧螺栓8配合使用。
[0044]
请参阅图6至图13,中轴传感器g的外周还套装有碟簧4,中轴传感器g在碟簧受压缩或伸展时起导向作用从而可防止碟簧发生横向错位移动,碟簧的右侧安装有用以支持碟簧压缩力的碟簧垫12,碟簧垫位于碟簧和油缸之间并分别与二者紧密接触(碟簧垫的具体位置请参阅图9),碟簧的左侧压紧在帽头边32上,该帽头边最大直径圆周上对称设置有二个止转口26,为防止中轴传感器外套19与智能闸筒体之间的旋转趋势而固定定位由止转螺钉27实现,在拉紧螺栓8通过拉紧螺栓连接丝扣29对中轴传感器g拧紧承受力矩时,安装在止转口26上的止转螺钉27可防止中轴传感器与智能闸筒体35之间发生相对转动,止转螺钉27可根据需要选择带有丝扣的定位螺钉,也可根据需要选用不带丝扣的定位销。智能闸筒体底部设有一个环形的下沉槽33(请参阅图13、14),中轴传感器外套19的左侧帽头边部分
嵌进下沉槽33的环形空间并且与环形空间底部保持一个间隙37,间隙37的尺寸范围应在0mm-10mm。
[0045]
请参阅图1至图17,中轴传感器包括设置在其外周上的中轴传感器外套19,中轴传感器外套19内安装有中轴传感器核心22,中轴传感器外套19内设有用于安装中轴传感器核心的腔体1901、连体桥38、对称设置在连体桥38两侧的弹簧安装腔3801,连体桥38与中轴传感器外套19为一体式结构,连体桥38上设有传感器信号线穿孔39(请参阅图5),中轴传感器核心远离连体桥的端部设有传感器抗压头41(请参阅图3、图4)。中轴传感器核心22呈圆柱状,其圆柱面上对称加工有两个圆孔,两个圆孔之间形成一个对力敏感的传感器腹板40,传感器腹板的二个表面上均布置有至少一个应变片36,在本实施例中,每个侧面上应变片的数量为2个,当然在本发明的其他实施例中,应变片的数量根据需要设定为1个或多个。中轴传感器核心的两个圆孔内均设置有用于将信号放大并传输的电路板,应变片与该电路板电性连接,应变片测得的微应变量数据经电路板放大处理将信号经传感器信号线穿孔送出智能闸供外围计算机系统综合分析并显示;中轴传感器核心的右侧平面与连体桥的左侧平面呈完全平面接触。
[0046]
连体桥38的右侧圆平面上对称加工有二个沉孔作为弹簧安装腔3801,张紧弹簧的中空部分被中轴传感器张紧螺钉20穿过,中轴传感器核心上设有供中轴传感器张紧螺钉20穿过的通孔,穿过传感器核心的张紧螺钉以螺纹连接方式安装在智能闸筒体张紧螺钉孔34里。
[0047]
智能闸筒体35的底部中心位置安置有抗压垫23,抗压垫设置在传感器抗压头41与智能闸筒体底部之间,用以承受来自闸瓦2传递至中轴传感器核心22的制动正压力,传感器抗压头41的外表面呈平面、球面或其他弧形曲面,抗压垫23与传感器抗压头41的接触面为平面、球面或其他弧形曲面。
[0048]
当然在本发明的其他实施例中,智能闸筒体35的底部也可以不设置抗压垫23。
[0049]
工作过程如下:
[0050]
为使智能闸ⅱ开闸让闸瓦2离开提升机闸盘ⅰ,由提升机液压站提供具有一定压力的液压油从进油道15进入油缸6的内腔,推动活塞7向右边运动,活塞带动支撑套9和拉紧螺栓8及中轴传感器g驱动智能闸筒体35向右边运动并压缩碟簧4蓄积能量,碟簧垫12对碟簧的总压缩变形量具有限制作用,中轴传感器在碟簧中心可引导碟簧沿着传感器轴向压缩或伸展移动,防止碟簧在移动过程中发生横向错位移动,碟簧压缩变形蓄积的力量将作为合闸时在闸瓦与闸盘之间形成制动正压力的条件以便需要时构成对运转中的提升机闸盘进行刹车制动的条件。
[0051]
智能闸在合闸时使闸瓦对提升机闸盘释放正压力以便对转动的闸盘形成摩擦力矩使提升机制动刹车,此时油缸内腔里的压力油液经过进油道泄放到液压站的油箱内,此时碟簧在变形蓄积力作用下回弹,驱动智能闸筒体连同闸瓦、中轴传感器、拉紧螺栓及活塞一道在外壳体内滑动向左边移动,将闸瓦紧贴上闸盘并对其施加制动正压力,在摩擦系数作用下产生摩擦力使得闸瓦对转动的闸盘形成制动摩擦力矩,实现对运行中的提升机制动。
[0052]
在闸瓦对闸盘的侧向表面施加制动正压力时,根据作用力和反作用力大小相等方向相反的静力学规律,闸盘对闸瓦的反作用力经过闸瓦与智能闸筒体上的抗压垫23传递到
中轴传感器g内部中轴传感器核心22的传感器抗压头41上,然后由中轴传感器核心右侧端面传递到连体桥38上,再经由中轴传感器外套19的帽头边32将反作用力转而依次经碟簧4、碟簧垫12传递到油缸6上,由油缸带动调整螺母13形成向右移动的趋势并由调整螺母的螺纹将制动正压力传递到外壳体1上,继而将其力传递到智能闸闸座ⅲ的立板上,然后再由固定到地面的智能闸闸座ⅲ与地面固定螺栓紧固的底座而形成静力学平衡,智能闸的制动正压力传递至中轴传感器核心22上时便由传感器腹板40上的应变片36感知到真实载荷后转化成电信号传输给计算机。
[0053]
在智能闸对闸盘制动时,预先开闸时碟簧所蓄积的弹力对闸盘会进行释放,闸盘上承受到的压力即是制动正压力,如图10所示,更进一步详细描述此正压力的传递途径为:
[0054]
活塞与油缸之间形成的内腔压力油液泄放到液压站油箱时活塞便向左移动,碟簧预先蓄积的弹力作用下压紧帽头边32,中轴传感器外套的左侧的端面与智能闸筒体的中轴传感器外套帽头边下沉槽33处于非接触状态且存在一个间隙37,正因存在这个间隙37,蓄积的碟簧弹力不会由中轴传感器外套19的左侧环形端面传递到智能闸筒体的底部,而是经连体桥38的左端面将弹簧弹力传递到中轴传感器核心22的右端面上,经由中轴传感器核心左边的传感器抗压头41紧密接触到抗压垫23并传递到智能闸筒体35与闸瓦2的接触面,再由闸瓦对闸盘面施加制动正压力,正因弹簧蓄积的弹力转化到了中轴传感器核心承担后,设置在中轴传感器核心内的对力敏感的传感器腹板40是受力敏感体,安装在传感器腹板上应变片将该受力应变量转换为电信号,经过圆孔内腔设置的放大器板对信号放大并将此信号由传感器信号线穿孔39送出供外围计算机系统综合分析和显示。
[0055]
智能闸开闸时的制动正压力泄放过程为:
[0056]
在智能闸开闸时闸瓦离开闸盘,这是因为压力油液从进油道15进入油缸腔体内驱动活塞连同支撑套9、拉紧螺栓8、中轴传感器外套19向右移动,此时帽头边32对紧密接触的碟簧施加压力并推动右移造成碟簧压缩,在开闸时中轴传感器外套19向右移动即可连带连体桥38推动二个张紧弹簧21向右边移动,因为预先对二个传感器张紧螺钉20左端头的螺纹拧入了二个智能闸筒体张紧螺钉孔34内并对二个张紧弹簧21施加了预紧力,也即固定地把连体桥38、张紧弹簧21和中轴传感器张紧螺钉20约束成了一体结构,在中轴传感器外套19带动连体桥38向右移动时便推动张紧弹簧21向右移动进而驱动中轴传感器张紧螺钉20的帽头边部分向右侧移动,因中轴传感器张紧螺钉20的螺纹部分已经用一定力矩拧入了智能闸筒体35的智能闸筒体张紧螺钉孔34内形成固定状态,所以也会带动智能闸筒体35向右侧移动,闸瓦随之就离开了闸盘使得闸盘制动正压力被撤除形成了开闸状态,此时提升机正常进入提升工作程序。
[0057]
中轴传感器g内部设计的张紧弹簧21的预紧状态的预紧力就是在开闸时为驱动智能闸筒体35向右侧开闸移动时足够克服筒体外圆周面与外壳体1的内圆周面滑动阻力提供保障。
[0058]
请参阅图3、图17,激励电压u
输入
是输入给桥式电路的工作电压,经中轴传感器核心内部布置的应变片电路感应的受力信号经电路转化成
△
u
输出
电压变化量并输出送入布置在中轴传感器核心内部的集成放大电路进行处理,再输出并远传到外围电气控制系统做集中控制应用。传感器腹板的中心位置二个表面均布置应变片,,作为技术说明经典情况是每个表面有二个应变片共计四片,应变片r1、r2、r3、r4按照图17所示的电路连接接入安装在中
轴传感器核心22的圆孔内集成电路处理板。
[0059]
应变信号转化成电信号输出的公式化表达如下:
[0060]
应变片的丝栅电阻值表达为r,
△
r是电阻变化量,在应变片粘贴位置因受力出现微小应变时,电桥电路转化成的输出电压变化量
△
u
输出
与输入激励电压u
输入
的比值存在关系等式
△
u
输出
/u
输入
=(
△
r1/r1+
△
r3/r3
-△
r2/r2
-△
r4/r4)/4,一般情况下的各个应变片的阻值基本相等,r=r1=r2=r3=r4,以上表达式为
△
u
输出
/u
输入
=(
△
r1+
△
r3
-△
r2
-△
r4)/(4r),单个应变片在受力应变情况下,其电阻值的变化率与应变片的应变量存在关系等式
△
r/r=kε,其中k为应变片的灵敏系数,这是应变片本体材料固有常数,一般为k=2(无量纲),r为应变片阻值(欧姆),
△
r为应变片阻值变化量(欧姆),ε为应变片粘贴位置的应变量(无量纲)。电桥的输出电信号(即电桥输出电压的变化量
△
u
输出
)相对输入激励电压的变化率由下面等式进行计算
△
u
输出
/u
输入
=k(ε1+ε3-ε2-ε4)/4,电桥输出电压的变化量
△
u
输出
的比率数值借助于应变片对应力的敏感反应建立电量值与力学物理量值相互关系,通过电桥对各个应变片布局的技巧接线来实现力的物理量由电量值间接表达,由此经计算机对电量进行数字化处理为可计算化、可读化、可视化提供了方法。以上应变片信号检测及转化技术为现有成熟技术范畴,不再赘述。
[0061]
提升机系统的制动总力矩是由制动装置系统所配置全部制动闸的制动正压力综合决定,每个制动闸即是总制动力矩的贡献单元体,本发明的提升机用智能闸中轴传感器可加装在普通制动闸上便对其即可改造为智能闸,从而能够随机动态检测制动闸开闸和闭闸时制动正压力,然后将各个制动闸的检测数据经过汇集计算机处理,从而获得提升机整机安全制动力矩范围是否符合国家规定的此类设备安全规程。
[0062]
以上所述,仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1