一种高过载保护力传感器及机器人的制作方法
1.本实用新型涉及传感器技术领域,特别是涉及一种高过载保护力传感器及机器人。
背景技术:
2.随着机器人技术的不断发展,机器人越来越多的应用于各种场合,例如搬运、焊接、检测等,机器人愈加丰富的应用场景要求其更具智能化、精准化,随之而来的是对机器人执行机构末端的力控需求的增多。
3.力传感器能够设置于机器人执行机构末端,以满足其力控需求。目前,力传感器已成为一重点研究方向,关于力传感器的结构设计,尤其是对弹性梁的设计方案层出不穷,但对于力传感器的过载保护设计相对较少。力传感器的过载保护结构具有重要意义,将直接关系使用力传感器的安全性,研究力传感器的安全性对于机器人领域,尤其是对安全性要求极高的协作机器人而言,具有重要意义。
4.在实现本实用新型过程中,实用新型人发现现有技术中对力传感器的过载保护结构普遍较为复杂。例如,公告号为cn103528726b的专利提供了一种过载保护结构,通过在过载保护梁及外梁上开设与保护销配合的保护孔,且保护销与过载保护梁为过盈配合、与外环工具通孔为间隙配合,该方案的过载保护结构刚度大、间隙可调,但是存在结构较为复杂、加工难度大的问题。
5.因此,有必要设计一种结构简单、易于实现、过载性能好的力传感器。
技术实现要素:
6.鉴于此,本实用新型的目的在于提供一种结构简单、易于实现、过载性能好的力传感器。
7.本实用新型可采用如下技术方案:一种力传感器,包括外部框架、内部平台和设置于所述外部框架和内部平台之间的若干弹性梁,所述力传感器包括周向分布的多个过载保护部,所述过载保护部包括所述外部框架部分向内延伸与所述内部平台部分向外延伸形成的具有间隙的配合面。
8.进一步的,所述多个过载保护部包括第一过载保护部和第二过载保护部,所述第一过载保护部至少用于限制所述力传感器沿竖直方向的位移,所述第二过载保护部至少用于限制所述力传感器沿水平方向的位移。
9.进一步的,所述第一过载保护部能够将竖直方向的位移至少部分的转化为水平方向的位移,所述第一过载保护部和第二过载保护部共同作用以限制所述力传感器沿竖直方向的位移。
10.进一步的,所述第一过载保护部包括具有间隙的配合斜面,所述配合斜面与竖直方向形成不为90度且不为180度的夹角。
11.进一步的,所述第二过载保护部的配合面为配合斜面或配合曲面,所述第二过载
保护部的配合面垂直于水平面。
12.进一步的,所述第二过载保护部包括对称的配合斜面或配合曲面。
13.进一步的,所述多个过载保护部包括成对设置的第一过载保护部和成对设置的第二过载保护部,以共同限制力传感器不同方向的位移或扭转。
14.进一步的,所述成对设置的第一过载保护部相对于力传感器的中心对称或反对称,和/或,所述成对设置的第二过载保护部相对于力传感器的中心对称或反对称。
15.进一步的,所述第一过载保护部包括沿竖直方向的配合阶梯面。
16.进一步的,所述过载保护部包括配合斜面,所述第一过载保护部的配合斜面与所述第二过载保护部的配合斜面倾斜方向不同,以限制所述力传感器不同方向的位移或扭转。
17.进一步的,所述力传感器包括四个呈十字分布的弹性梁,所述过载保护部设置于相邻的弹性梁之间。
18.进一步的,所述力传感器形成为扭矩传感器、三维力传感器或六维力传感器。
19.本实用新型还可采用如下技术方案:一种机器人,包括通过致动器驱动执行工作的工作臂,所述工作臂末端包括用于连接任务工具的连接器,所述连接器内设置上文任一项所述的力传感器,所述机器人至少部分的根据力传感器的检测结果控制执行工作。
20.进一步的,所述机器人为工业机器人,优选的,所述机器人为协作机器人。
21.与现有技术相比,本实用新型具体实施方式的有益效果是:力传感器的过载保护部包括外部框架部分向内延伸和内部平台部分向外延伸形成的具有间隙的配合面,通过配合面的抵接限制力传感器的位移,力传感器的结构简单、易于加工、过载性能好。
附图说明
22.以上所述的本实用新型的目的、技术方案以及有益效果可以通过下面附图实现:
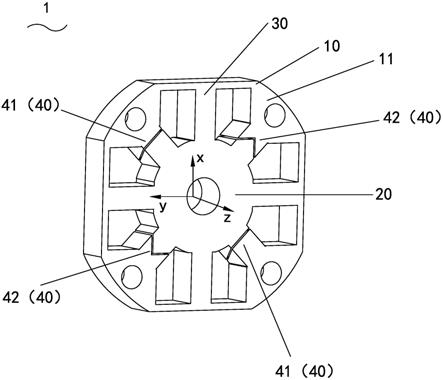
23.图1是本实用新型第一实施例的力传感器的示意图
24.图2是本实用新型第二实施例的力传感器的示意图
25.图3是本实用新型第三实施例的力传感器的示意图
26.图4是本实用新型第四实施例的力传感器的示意图
27.图5是本实用新型一实施例的机器人的示意图
具体实施方式
28.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的方案进行清楚、完整的描述,显然,所描述的实施例是本实用新型的一部分实施例而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.本实用新型保护一种力传感器,参图1
‑
4示出了本实用新型所保护的力传感器1的几个实施例,力传感器1包括外部框架10、内部平台20和设置于所述外部框架10和内部平台20之间的若干弹性梁30,所述弹性梁可以粘贴应变片以根据弹性梁的变形检测力/力矩,所述力传感器1包括周向分布的多个过载保护部40,用于限制所述力传感器1的位移以保证力
传感器的使用安全,所述过载保护部40包括所述外部框架10部分向内延伸与所述内部平台20部分向外延伸形成的具有间隙的配合面。具体的,所述外部框架10部分向内延伸形成一个切面,所述内部平台20部分向外延伸形成一个切面,所述外部框架10的切面和所述内部框架的切面能够形成具有间隙的配合面,当力传感器受到超过所述力传感器的量程的力或力矩时,所述间隙能够提供过载行程避免所述力传感器的损坏,同时,所述外部框架10和内部平台20形成的配合面受力限制所述力传感器1的过度变形,所述外部框架10与内部平台形成配合面,所述外部框架向内延伸的部分和所述内部平台向外延伸的部分形成了支撑结构,因此力传感器受过载力刚性好、过载性能好,并且可以通过改变所述配合面的大小,间接的改变了所述支撑结构的尺寸,以强化所述力传感器的过载性能。通过外部框架10和内部平台20形成具有间隙的配合面来限制力传感器1的过载,间隙的存在能够保证力传感器1具有适当的过载行程,通过调整间隙的大小能够适应不同场景下的过载要求,通过配合面作用实现过载保护,未增加新的零部件,所述力传感器的结构比较简单,同时,对配合面的处理较为简单,相较于传统技术中进行销孔配合或者螺钉的方式,本方案的力传感器结构简单、易于加工、容易实现并且刚度较高、抗过载能力强,适合在工业推广应用。
30.力传感器1包括多个过载保护部40,所述过载保护部40包括所述外部框架10部分向内延伸与所述内部平台20部分向外延伸形成的具有间隙的配合面,进一步的,所述外部框架10的多个不同位置部分向内延伸,所述内部平台20的多个不同位置部分向外延伸,进而形成多个具有间隙的配合面,进而形成多个过载保护部40,优选的,所述多个过载保护部40沿力传感器1 的周向均匀分布。在本实用新型的一个实施例中,所述多个过载保护部40 包括第一过载保护部41和第二过载保护部42,所述第一过载保护部41至少用于限制所述力传感器1沿竖直方向的位移,所述第二过载保护部42至少用于限制所述力传感器1沿水平方向的位移。力传感器1最多可能会受到6个方向的过载力的作用,对于一个力传感器而言,要全面保证其过载保护的效果,需要考虑6个方向的过载力的作用,以力传感器1的中心为坐标原点建立坐标系,参图1,力传感器1有可能会受到六个方向的过载力的作用,即 fx、fy和fz,以及mx、my和mz,也即沿x轴方向、y轴方向、z轴方向的力和力矩,其中x、y轴方向的受过载力导致水平方向的位移,z轴方向的受过载力导致竖直方向的位移,当力传感器受到不同方向的过载力矩时,分别可能产生沿x、y、z轴的扭转变形,通过设置多个过载保护部包括第一过载保护部41和第二过载保护部42,能够全面保证力传感器1的过载保护的效果,使得力传感器1能够应对六个方向的力的作用,具体的,所述第一过载保护部41至少用于限制所述力传感器1沿竖直方向的位移,所述第二过载保护部 42至少用于限制所述力传感器1沿水平方向的位移,进一步的,所述第二过载保护部42用于限制所述力传感器1受到过载力矩时引起的扭转变形,所述第一过载保护部41用于辅助限制所述力传感器沿水平方向的变形,也即,以力传感器中心点为原点建立的坐标系为参考,所述第一过载保护部41至少用于限制z方向的位移,所述第二过载保护部42至少用于限制x、y方向的位移,也即,所述第一过载保护部41至少用于限制fz的作用,所述第二过载保护部42至少用于限制fx、fy、mx、my、mz的作用。具体的,所述第一过载保护部41用于辅助所述第二过载保护部42限制水平方向的位移,所述第二过载保护部用于辅助所述第一过载保护部限制竖直方向的位移。具体的,所述第一过载保护部41和第二过载保护部42可以单独用于限制力传感器沿某一方向的位移,或者,所述第一过载保护部和第二过载保护部能够共同作用以限制力传感器沿某一方向的位
移和/或扭转,以加强所述力传感器过载保护的效果,又或者,复数个第一过载保护部和复数个第二过载保护部共同作用以限制力传感器的位移和/或扭转。
31.在本实用新型的一个实施例中,所述过载保护部包括配合斜面,即所述第一过载保护部包括配合斜面,所述第二过载保护部包括配合斜面,所述第一过载保护部的配合斜面和所述第二过载保护部的配合斜面的倾斜方向不同,所述第一过载保护部的斜面至少用于限制所述力传感器沿竖直方向的位移,所述第二过载保护部的斜面至少用于限制所述力传感器沿水平方向的位移。所述力传感器包括沿周向分布的多个过载保护部,所述多个过载保护部包括至少两个第一过载保护部和至少两个第二过载保护部,所述至少两个第一过载保护部至少用于限制所述力传感器沿竖直方向的位移,所述至少两个第二过载保护部至少用于限制所述力传感器沿水平方向的位移。进一步的,复数个所述第一过载保护部共同用于限制所述力传感器沿竖直方向的位移,以及复数个第二过载保护部共同用于限制所述力传感器沿水平方向的位移,以保证所述力传感器的过载保护性能。
32.在本实用新型的一个实施例中,所述第一过载保护部包括具有间隙的配合斜面,所述配合斜面与竖直方向形成不为90度且不为180度的夹角。所述第二过载保护部的配合面包括配合斜面或配合曲面,所述第二过载保护部的配合面垂直于水平面。即所述第一过载保护部的配合面与竖直方向形成不为 90度且不为180度的夹角,即所述第一过载保护部的配合面在竖直方向上为倾斜状态,以至少用于限制力传感器沿竖直方向的位移,即所述第一过载保护部的配合面能够产生竖直方向上的支撑力,以限制力传感器沿竖直方向的位移。同时,所述第一过载保护部的配合面还能够对水平方向的位移进行限制。所述力传感器包括多个过载保护部,所述多个过载保护部包括复数个第一过载保护部,所述复数个第一过载保护部的配合斜面与竖直方向形成不为 90度且不为180度的夹角,即所述复数个第一过载保护部的配合斜面在竖直方向为倾斜状态,优选的,所述复数个第一过载保护部的配合斜面的倾斜角度相同。在本实用新型的一个实施例中,所述复数个第一过载保护部与竖直方向形成不为90度且不为180度的夹角,所述复数个第一过载保护部的至少其中两个在竖直方向的倾斜方向相反,以限制所述力传感器沿竖直方向的相反作用力引起的位移。
33.如上所述,所述第二过载保护部的配合面垂直于水平面,所述第二过载保护部至少用于限制所述力传感器沿水平方向的位移。所述第二过载保护部的配合面能够对水平方向的作用力引起的位移,以及力传感器受到过载力矩引起的扭转进行限制。在本实用新型的一个实施例中,第二过载保护部包括配合斜面,所述多个过载保护部包括复数个第二过载保护部,其中至少两个第二过载保护部在垂直于水平面的方向上倾斜方向相反,以限制力传感器不同方向的位移或扭转。具体的,所述第二过载保护部包括对称的配合斜面或配合曲面,以使得所述第二过载保护部能够对多个方向的力或力矩进行限制。
34.力传感器1包括多个过载保护部40,优选的,所述多个过载保护部40 沿力传感器1周向均匀分布,所述多个过载保护部40包括成对设置的第一过载保护部41和成对设置的第二过载保护部42,以共同限制力传感器不同方向的位移或扭转。也即,所述多个过载保护部包括至少两个第一过载保护部和至少两个第二过载保护部,以共同限制力传感器不同方向的位移或扭转。进一步的,所述成对设置的第一过载保护部相对于力传感器的中心对称或反对称,和/或,所述成对设置的第二过载保护部相对于力传感器的中心对称或反对称,参图1,成对设置的第一过载保护部反对称以对竖直方向上的反作用力引起的位移进行限制,
一个第一过载保护部主要用于限制所述力传感器沿竖直方向向下的位移,另一个第一过载保护部主要用于限制所述力传感器沿竖直方向向上的位移;成对设置的的第二过载保护部对称设置,使得力传感器受过载力沿x、y轴方向产生位移或者受到过载力矩产生扭转时,均由不同的第二过载保护部进行共同限制,以提升力传感器的过载保护性能。通过这样设置,使得成对设置的第一过载保护部能够限制力传感器竖直方向的相反作用力引起的位移,或者对竖直方向的力引起的位移进行双重作用;使得成对设置的第二过载保护部能够对各个方向的力引起的位移或力矩引起的扭转进行双重作用,以提升力传感器的过载保护性能。
35.力传感器1包括多个过载保护部40,所述多个过载保护部40包括第一过载保护部41和第二过载保护部42,下面将提供几个所述第一过载保护部41和第二过载保护部42的具体实施例。
36.在本实用新型的一个实施例中,参图1,所述第一过载保护部41形成为具有间隙的配合斜面,即所述外部框架10部分向内延伸形成一斜面,所述内部平台20部分向外延伸形成一斜面,上述外部框架10的斜面和内部平台20 的斜面形成具有间隙的配合斜面,以至少用于限制所述力传感器1沿竖直方向的位移,也即至少用于限制所述力传感器1沿z轴方向的位移,当包括间隙的配合斜面的第一过载保护部41受到z轴方向的过载力时,由于斜面的作用,还能够将竖直方向的位移转化为水平方向的位移,由所述第二过载保护部42进一步作用限制位移,以强化所述力传感器对竖直方向的位移的限制,使得所述力传感器对竖直方向的过载保护性能较好,当竖直方向的力较小时,仅通过第一过载保护部即可限制其位移,当竖直方向的力持续增大时,第一过载保护部的配合斜面将竖直方向的位移转化为水平面的位移,第二过载保护部能够限制水平面的位移,因此所述第一过载保护部和第二过载保护部共同作用以限制所述力传感器沿竖直方向的位移,使得所述力传感器过载性能较好,能够承受较大的过载力。同时,由于所述第一过载保护部采用配合斜面,所述力传感器在z轴方向所受过载力越大,所述第一过载保护部和第二过载保护部之间所产生的摩擦力及支撑反力越大,以使得力传感器的过载性能较好。
37.在本实用新型的另一实施例中,参图4,所述第一过载保护部41形成为具有间隙的沿竖直方向的配合阶梯面,即所述外部框架10部分向内延伸形成一阶梯面,所述内部平台20部分向外延伸形成一阶梯面,所述外部框架10 的阶梯面和所述内部平台20的阶梯面形成具有间隙的配合的阶梯面,以至少用于限制所述力传感器1沿竖直方向的位移,也即至少用于限制所述力传感器1沿z轴方向的位移。
38.在本实用新型的一个实施例中,所述第二过载保护部42的配合面包括对称的配合面,即所述外部框架10部分向内延伸形成一个切面,所述内部平台 20部分向外延伸形成一个切面,所述外部框架10的切面和所述内部平台20 的切面共同组成具有间隙的配合面,同时,所述外部框架10的切面为对称结构,所述内部平台20的切面为对称结构,所述第二过载保护部42形成为具有间隙的对称配合面,以至少用于限制所述力传感器1沿水平方向的位移,也即至少用于限制所述力传感器1在x、y轴方向的位移,进一步的,所述第二过载保护部42用于限制所述力传感器受到过载力矩引起的扭转变形。进一步的,所述第二过载保护部42包括对称的配合斜面,在本实用新型的一个实施例中,参图1,图1中的第二过载保护部42包括对称的配合面,所述配合面中的每一个由两个对称交叉的斜面组成,所述配合面大致为等腰三角形的俯视图。在本实用新型的另一实施例中,参图2,所述第二过载保护部42包
括对称的配合面,所述配合面中的每一个包括对称的斜面,所述配合面的俯视图大致为等腰梯形,在其他的实施例中,所述第二过载保护部42的俯视图还可以是正六边形等形状。在本实用新型的又一实施例中,参图3,所述第二过载保护部42包括对称的配合曲面,所述配合面中的每一个包括对称的曲面,即所述第二过载保护部42包括两个间隙配合的对称曲面。通过设置第二过载保护部42包括具有间隙的对称配合面,所述对称配合面能够至少用于沿水平方向上的各方向限制所述力传感器1的位移,结合所述第一过载保护部 41至少用于在竖直方向上限制所述力传感器1的位移,以全面的限制所述力传感器1在不同方向的位移。所述第一过载保护部41和第二过载保护部42 可以用于限制不同方向的位移,且所述第一过载保护部41和第二过载保护部 42限制的位移方向互相垂直时,所述第一过载保护部41在发挥过载保护作用时,所述第二过载保护部42能够在第一过载保护部41所限制的方向所垂直的方向上给予第二次的限制,以加强所述第一过载保护部的过载保护效果,反之亦然,使得所述力传感器的过载保护性能好,所述力传感器安全性好。例如,当第一过载保护部41为具有间隙的配合斜面时,所述第一过载保护部受到z轴方向的过载力时,由于斜面作用能够将竖直方向的位移转化为水平方向的位移,而第二过载保护部42包括具有间隙的对称配合面,所述第二过载保护部42限制的位移方向垂直,所述第二过载保护部能够限制水平方向的位移,进而当第一过载保护部将竖直方向的位移至少部分的转化为水平方向位移时,所述第二过载保护部能对其进一步限制,以保证过载保护的工作效果。同时,所述第二过载保护部42至少用于限制水平方向的位移,当所述力传感器受到x、y轴方向的过载力时,所述第二过载保护部能够限制水平方向的位移,以及,当所述力传感器受到x、y、z轴方向的过载力矩时,所述第二过载保护部42的对称配合面能够限制力传感器的扭转变形。
39.力传感器1包括外部框架10,所述外部框架10包括具有开孔的固定部 11,所述力传感器1通过所述开孔以固定安装,所述固定部11向内部延伸以形成部分的过载保护部。所述力传感器1包括四个呈十字分布的弹性梁30,所述过载保护部设置于相邻的弹性梁30之间,以均匀所述力传感器的过载保护效果。
40.上文所述的力传感器包括多种形式,所述力传感器可以是扭矩传感器、三维力传感器或六维力传感器。
41.以上优选实施例的有益效果是:力传感器的过载保护结构包括外部框架和内部平台20形成的具有间隙的配合面,通过配合面的抵接作用限制力传感器的位移,力传感器的结构设计简单、加工容易、易于实现。
42.本实用新型还用于提供一种机器人,参图5,所述机器人6包括通过致动器驱动以执行工作的工作臂60,所述工作臂60末端包括用于连接任务工具的连接器70,所述连接器70内设置上文中任一项所述的力传感器1,所述机器人至少部分的根据力传感器的检测结果控制执行工作。
43.具体的,所述连接器70为工具法兰,所述工具法兰可以连接各种任务工具,例如夹爪、吸盘等。具体的,所述机器人6为工业机器人,优选的,所述机器人为能够与人协作执行工作的协作机器人,所述协作机器人能够经过教导以根据教导轨迹执行工作。
44.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于
本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1