利用信道测量进行定位的系统和方法与流程
利用信道测量进行定位的系统和方法
1.相关申请的交叉引用
2.本技术要求于2019年2月19日提交的题为“systems and methods for positioning with channel measurements”的美国临时申请第62/807,487号和于2020年1月30日提交的题为“systems and methods for positioning with channel measurements”的美国非临时专利申请第16/776,871号的权益,这两件专利申请都被转让给本专利申请的受让人,并且其全部内容通过引用明确并入本专利申请中。
技术领域
3.本公开大体上涉及通信,并且更具体地,涉及用于支持用户设备(ue)的位置确定的技术。
背景技术:
4.无线网络中的典型定位解决方案依赖于基于三边测量或其变体的技术。术语“定位(position)”和“位置(location)”在此可以互换。在三边测量中,用户设备(ue)的位置可以通过确定ue与多个空间分离的无线接入点之间的距离来确定。许多传统的定位解决方案受到限制,因为它们依赖于视线(line
‑
of
‑
sight,los)信道测量来导出用于定位的度量。这些los测量/度量可以包括飞行时间(time
‑
of
‑
flight,tof)或往返时间(round trip time,rtt)、到达时间(time
‑
of
‑
arrival,toa)、到达时间差(time difference of arrival,tdoa)、到达角(angle of arrival,aoa)、离开角(angle of departure,aod)等。然而,伴随多径出现的非los(non
‑
los,nlos)信道抽头(tap)中的信息也可能包含用于定位的有用信息。许多传统技术不使用nlos信号中的信息进行定位。相反,传统系统通常将多径信号视为定位误差和/或信号质量下降的来源,并试图减轻多径的影响。因此,需要有利地利用nlos信号中的信息进行定位的技术。
技术实现要素:
5.使用为无线接入点(wireless access point,wap)获得的信道测量来支持用户设备(ue)的定位确定,其中信道测量针对视线(los)和非los(nlos)信号。基于wap历书(almanac)信息和信道测量,可以确定指示信号源相对于ue的第一定位的定位的信道参数。使用ue的第一定位以及信号源与对应的信道参数的关联性,可以确定ue的第二定位信息。ue的定位可以是概率密度函数。此外,可以确定信号源的定位信息,诸如概率密度函数、以及信号阻塞概率和天线几何形状,并且可以相应地更新wap历书信息。
6.在一些实施方式中,一种支持定位确定的方法包括:获得对于至少一个无线接入点(wap)的多个信道测量,其中信道包括视线(los)和非los(nlos)信号;基于wap历书信息和对于至少一个wap的多个信道测量,确定至少一组对应的信道参数,其中信道参数指示多个信号源相对于用户设备(ue)的第一定位信息的定位;将多个信号源与至少一组信道参数中的对应的信道参数相关联;以及基于ue的第一定位信息以及多个信号源与对应的信道参
数的关联性,确定ue的第二定位信息。
7.在一些实施方式中,一种在无线网络中被配置为支持定位确定的实体,包括:外部接口,其被配置为与无线网络中的实体通信;至少一个存储器;以及至少一个处理器,与外部接口和至少一个存储器耦合,至少一个处理器被配置为:获得对于至少一个无线接入点(wap)的多个信道测量,其中信道包括视线(los)和非los(nlos)信号;基于wap历书信息和对于至少一个wap的多个信道测量,确定至少一组对应的信道参数,其中信道参数指示多个信号源相对于用户设备(ue)的第一定位信息的定位;将多个信号源与至少一组信道参数中的对应的信道参数相关联;以及基于ue的第一定位信息以及多个信号源与对应的信道参数的关联性,确定ue的第二定位信息。
8.在一些实施方式中,一种支持定位确定的方法,包括:在一段时间内接收多个信号源的第一信号源信息,其中对于多个信号源中的每一个,第一信号源信息包括对应的信号源定位信息、对应的信号阻塞概率信息、对应的信号源观察定位和指示观察时间的时间戳;通过聚集对应于多个信号源中的至少一个信号源的第一信号源信息来生成对应于至少一个信号源的至少一组信号源信息;以及用至少一组信号源信息来更新无线接入点(wap)历书信息。
9.在一些实施方式中,一种在无线网络中被配置为支持定位确定的实体,包括:外部接口,其被配置为与无线网络中的实体通信;至少一个存储器;以及至少一个处理器,与外部接口和至少一个存储器耦合,至少一个处理器被配置为:在一段时间内接收多个信号源的第一信号源信息,其中对于多个信号源中的每一个,第一信号源信息包括对应的信号源定位信息、对应的信号阻塞概率信息、对应的信号源观察定位和指示观察时间的时间戳;通过聚集对应于多个信号源中的至少一个信号源的第一信号源信息来生成对应于至少一个信号源的至少一组信号源信息;以及用至少一组信号源信息来更新无线接入点(wap)历书信息。
附图说明
10.图1a是根据一个实施例的示例通信系统的图,该示例通信系统可以利用5g网络来确定移动设备的定位和/或确定与信号源相关的定位和其他信息。
11.图1b是根据一个实施例的示例wlan通信系统的图,该示例wlan通信系统便于确定移动设备的定位和/或确定与信号源相关的定位和其他信息。
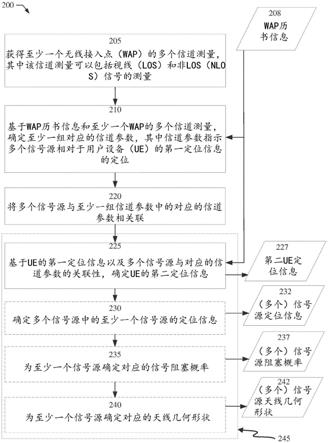
12.图2a示出了支持ue位置确定和/或信号源位置确定的方法的流程图。
13.图2b示出了用于从已知区域几何形状和rf勘测获得初始wap历书信息的示例过程。
14.图2c示出了确定一组信号源和对应的信号源信息的方法。
15.图2d示出了示例贝叶斯滤波器的框图,该框图示出了可能的输入和输出。
16.图3a
‑
3b示出了说明图2的方法的操作的示例场景,示出了具有反射表面的环境,其中单个wap向ue发送信号。
17.图4示出了便于确定ue定位的方法的流程图。
18.图5示出了ue辅助/基于ue的定位过程,lmf可以使用该过程来支持基于ue的定位、ue辅助定位和辅助数据的传送。
19.图6示出了网络辅助定位过程,lmf可以使用该过程来支持网络辅助和基于网络的定位。
20.图7示出了用于获得非ue相关联的网络辅助数据的过程,该网络辅助数据可以被lmf用来支持一个或多个ue的定位。
21.图8是示出了ue的硬件实施方式的图。
22.图9是示出支持定位确定的网络实体的硬件实施方式的图。
23.根据某些示例性实施方式,各个附图中的相同的附图标记和符号表示相同的元件。此外,一个元件的多个实例可以通过在该元件的第一数字后面加上字母或连字符和第二数字来表示。例如,元件110的多个实例可以被指示为110
‑
1、110
‑
2、110
‑
3等。当仅使用第一数字来指代这样的元件时,应该理解该元件的任何实例(例如,前面示例中的元件110将指代元件110
‑
1、110
‑
2和/或110
‑
3)。
具体实施方式
24.许多传统技术不使用nlos信号中的信息用于定位目的。相反,传统系统通常将多径信号视为定位误差和/或信号质量下降的来源,并试图减轻多径的影响。因为多径信号被反射,所以多径信号相对于los发射信号将经历延迟。术语“nlos信道抽头”可以指相对于(例如,来自相同的wap)对应的los信号满足某些指定延迟标准的多径信号。术语“nlos”可以指已反射(例如由ue)接收到的信号的信道。在具有大量结构的城市峡谷或具有大量内墙的室内空间等区域,可能会出现大量nlos信号。因此,利用nlos信号中的信息有利地进行定位的技术是理想的,因为nlos抽头通常是经由静止物体(例如墙壁、建筑物等)的反射产生的,它们通常不随时间变化。因此,使用无线接入点(wap)的已知位置,nlos信号可以被用来推断关于反射器位置的信息。此外,当关于环境特征的位置和其他信息已知时,与传统的基于三边测量的技术相比,定位确定可以用较少数量的可视wap来实现。然而,由于周围的几何形状(例如反射器的位置)是未知的,并且从成本和资源的角度来看,通过持续的勘测来确定可能是困难和昂贵的,因此利用nlos测量一直具有挑战性。
25.此外,还可以利用nlos信号的信道测量来提高定位精度。例如,由于定时同步问题(例如,bs
′
和ue之间的定时同步)和其他实施方式问题(例如,bs天线位置和/或bs天线配置的未记录的变化),在ue处从不同基站(bs
′
)接收到的toa测量可能会经历误差,这可能会限制精度。另一方面,信道测量(诸如在同一ue处测量的来自同一wap的los和nlos信号之间的时间延迟)共享相同的(例如,bs
‑
ue)定时同步误差。当确定los路径和nlos路径之间的toa差异时,这些误差被抵消。因此,在ue处测量的(来自wap的)los路径和nlos路径之间的toa差异表现出更高的精度。
26.因此,一些公开的实施例使用信道测量,其可以包括los和nlos信号以及wap历书信息(例如,关于环境特征、天线位置和/或天线几何形状),以便于确定ue定位信息、确定和/或更新信号源定位信息以及确定信号源阻塞概率。信道测量可以包括ue和信号源之间的通信信道中的los和nlos(或多径)信号的测量。从信道测量获得的信道参数可以基于wap历书信息与信号源相关联,并用于确定ue的定位信息,和/或确定和/或更新信号源定位信息,和/或确定信号源阻塞概率。
27.在一些实施例中,提供给ue的位置辅助信息可以包括wap历书信息。可以在ue处
和/或在wap处和/或在与wap相关联的网络实体(例如,位置服务器或其他实体)处和/或上述的任意组合处存储、维护和/或更新wap历书。wap历书可以包括区域的地图或区域几何形状信息(例如,可能影响rf传播的结构位置等环境特征)及用于该区域中的wap并与地图位置相关联的rf信息。wap历书信息可以提供关于从地图位置可见的信号源、信号源标识符、可能的信号源位置、信号阻塞概率、信号阻塞区域、信号反射点等影响射频(rf)传播的信息。天线几何形状信息可以包括关于(多个)天线的位置、物理天线端口标识符(physical antenna port identifier,pap id)、天线的空间分布(对于多天线系统)、天线阵列定向、天线间距等的信息。在一些实施例中,可以通过在一段时间内将ue的确定的定位与和信号源、信号源的信号阻塞概率、天线几何形状等有关的信息相关联,以周期性地更新wap历书信息。
28.在一些实施例中,贝叶斯滤波器可以用于确定以下中的一个或多个:ue的定位、信号源的定位、信号源的信号阻塞概率和/或无线接入点(wap)天线几何形状。例如,贝叶斯滤波器可以使用以下中的一个或多个:(a)与信号源相关的映射信息,(b)ue的先前定位信息(例如,来自滤波器的先前迭代),(c)从信道测量导出的信息(例如,信道参数到信号源的映射),(d)信号源的预测阻塞概率(例如,来自滤波器的先前迭代)和阻塞演化的时空模型,以确定(或更新):(i)ue的定位信息,(ii)对应于信号源的定位信息,(iii)信号源的信号阻塞概率,和/或(iv)wap天线几何形状。在一些实施例中,以上确定的信息可用于更新映射信息。在一些实施例中,贝叶斯滤波器可以可选地使用ue惯性测量值和/或ue运动模型中的一个或多个作为输入。在一些实施例中,以下的一个或多个可用于确定或初始化wap历书信息:射频(rf)勘测、可用的环境映射信息(例如,wap的位置和/或墙壁、隔板、结构、环境特征和/或其他反射器的位置)和/或已知的天线几何形状(例如,与wap相关联的天线)。rf勘测可用于将信道特性与定位相关联,并且在某些情况下,可包括rf指纹识别(rf fingerprinting)。
29.贝叶斯滤波器基于噪声测量提供动态系统状态的概率估计。例如,概率估计可以涉及以下一个或多个:ue的位置、信号源的位置和/或信号阻塞概率。在贝叶斯滤波器中,时间t处的系统状态s
t
可由一组随机变量r
t
表示,而表示不确定性的置信度由r
t
上的概率分布给出。贝叶斯滤波器在以传感器数据中的所有信息为条件的状态空间上迭代地估计这种置信度。例如,如果正在确定ue定位,对于所有可能的位置r,在给定先前传感器测量的历史的情况下,可以将贝叶斯滤波器视为对与ue位于位置r的概率有关的问题的响应。
30.出于效率原因,贝叶斯滤波器通常假设当前状态变量r
t
包括所有相关信息。例如,贝叶斯滤波器可以假设传感器测量仅取决于时间t处的ue当前定位,并且时间t处的ue位置仅取决于时间(t
‑
1)处的先前状态r
t
–1。(t
‑
1)之前的状态可以忽略(即假设不提供额外信息)。在一些实施例中,ue的运动模型(当可用时)和/或惯性传感器测量可以用作贝叶斯滤波器的输入。给定ue在时间(t
‑
1)的位置,ue运动模型和/或惯性传感器测量可以指示ue在时间t的位置。在一些公开的实施例中,贝叶斯滤波器的有效近似可以通过利用扩展卡尔曼滤波器(extended kalman filter,ekf)和高斯混合模型(gaussian mixture model,gmm)来实现。
31.这里使用的术语“定位信息”可以涉及与定位关的任何信息,例如相对于某个参考的定位坐标、定位的概率密度函数等。连续随机变量的概率密度函数(pdf)输出一个值,该
值在样本空间中的任何给定样本上提供随机变量的值等于该样本的相对可能性。定位信息也可以被称为位置、位置估计、位置固定、固定、定位、定位估计或定位固定,并且可以是地理性的,从而提供位置坐标(例如,纬度和经度),该位置坐标可以包括或不包括高度分量(例如,高于或低于某个参考诸如海平面、地平面、地板平面或地下室平面的高度)。可选地,位置可以被表示为城市位置(例如,作为邮政地址或建筑物中某个点或小区域的指定,诸如特定的房间或楼层)。位置也可以表示为区域或体积(以地理或城市的形式定义),在该区域或体积内,所讨论的实体被期望以一定的概率或置信水平(例如,67%、95%等)定位。位置还可以表示为相对位置,包括例如相对于已知位置的某个原点定义的距离和方向或相对x、y(和z)坐标,该已知位置可以在地理上、用公民术语定义,或者通过参考地图、平面图或建筑平面图上指示的点、区域或体积来定义。在本文包含的描述中,术语定位、定位信息、位置或位置信息的使用可以包括这些变体中的一个或多个,除非另有说明。当计算ue的位置时,通常求解局部x、y和可能的z坐标,然后,(如果需要)将局部坐标转换为绝对坐标(例如,高于或低于平均海平面的纬度、经度和高度)。在一些实施例中,在一些实施例中,物体的定位信息可以包括物体的姿态。物体的姿态可以指物体相对于参考系统的定位和定向。物体的姿态可以指定位(例如,x、y、z坐标)和定向(例如,滚动、俯仰、偏航),并且可以在多达六个自由度(6
‑
dof)中确定。例如,ue的姿态可以根据相对于某个已知参考系统的6
‑
dof姿态来指定。
32.术语“信号源”用于指当信道中存在los条件时的真实或物理信号源(诸如发送器),或者当对应信道存在nlos条件时的虚拟信号源(例如与反射器相关联)。当来自真实信号源的信号在反射器处被反射时,信号可能在接收器处沿着不同的路径到达,并且可能被视为源自虚拟信号源。术语“虚拟接入点”(virtual access point,vap)有时用来指虚拟信号源。由于反射可能取决于ue相对于反射表面(诸如墙壁、建筑物和其他环境特征)的定位,所以当ue移动通过一个区域时,虚拟信号源或vap可能会出现(例如激活)或消失(例如停用)。
33.一些公开的实施例还涉及可以使用ue定位信息(例如ue定位的概率密度函数)来确定或预测vap或虚拟信号源激活(例如ue在其估计位置可见的虚拟信号源)的ue和/或另一网络实体(诸如位置服务器)。在一些实施例中,本文描述的功能可以由ue和/或另一个网络实体(例如,位置服务器)执行,和/或分布在ue和另一个网络实体之间。例如,ue可以获得信道测量,确定其定位,并在本地确定和更新wap历书信息。作为另一个示例,网络实体可以基于信道测量(例如,从一个或多个ue)获得信息,确定(多个)ue定位,并随时间变化而确定和更新wap历书信息。在一些实施例中,聚合的wap历书信息(例如,基于随着时间从多个ue获得的信道测量)可以作为位置辅助数据(例如,由位置服务器和/或另一网络实体)提供给ue。
34.在一些实施例中,可以通过从一个或多个信号源获得多个信道测量来确定ue定位信息,其中每个信道可以包括los和nlos信号。此外,可以根据信道测量来确定信道参数,并且基于wap历书信息,可以确定将ue的相对定位与每个信号源相关联的几何参数。信道参数可以与对应的信号源相关联,并且贝叶斯滤波器可以用于确定和/或更新ue的定位信息、信号源定位以及信号源的信号阻塞概率。
35.图1a是根据一个实施例的示例通信系统的图,该示例通信系统可以利用5g网络来
确定移动设备的定位和/或确定与信号源相关的定位和其他信息。通信系统100包括ue 105和第五代(5g)网络的组件,该第五代(5g)网络包含下一代无线接入网(ng
‑
ran)135和与外部客户端130通信的5g核心网(5gcn)140,该ng
‑
ran 135包括基站(bs),其有时被称为新无线电(nr)nodeb或gnb 110
‑
1、110
‑
2和110
‑
3(在此统称为gnb 110)。5g网络也可以称为新无线电(nr)网络;ng
‑
ran 135可以被称为nr ran或5g ran;并且5gcn 140可以被称为下一代(ng)核心网络(ngc)。在第三代合作伙伴计划(3gpp)中,正在进行ng
‑
ran和5gcn的标准化。因此,ng
‑
ran 135和5gcn 140可以符合来自3gpp的5g支持的当前或未来标准。通信系统100可以进一步利用来自航天器(sv)190的、用于全球导航卫星系统(gnss)(例如gps、glonass、伽利略或北斗)或者一些其他本地或区域卫星定位系统(sps)(诸如irnss、egnos或waas)的信息。下面描述通信系统100的附加组件。通信系统100可以包括附加或替代组件。
36.应该注意的是,图1a仅提供了对各种组件的概括性图示,可以适当地使用这些组件中的任何一个或全部,并且可以根据需要重复或省略每个组件。具体地,尽管仅示出了一个ue 105,但是应当理解,许多ue(例如,数百、数千、数百万等)可以利用通信系统100。类似地,通信系统100可以包括更多或更少数量的sv 190、gnb 110、外部客户端130和/或其他组件。连接通信系统100中的各种组件的所示出的连接包括数据和信令连接,其可以包括附加的(中间)组件、直接或间接的物理和/或无线连接,和/或附加的网络。此外,取决于期望的功能,可以重新布置、组合、分离、替换和/或省略组件。
37.尽管图1示出了基于5g的网络,但是可以针对其他通信技术(诸如3g、长期演进(lte)(4g)和ieee 802.11wifi等)使用类似的网络实施方式和配置。例如,在使用例如ieee 802.11无线电接口的无线局域网(wlan)的情况下,ue 105可以与接入网络(an)通信,如与ng
‑
ran相反,并且因此组件135有时在本文中被称为an或称为ran,由术语“(r)an”或“(r)an 135”表示。在an(例如ieee 802.11an)的情况下,an可以连接到非3gpp互通功能(n3iwf)(例如在5gcn 140中)(图1a中未示出),其中n3iwf连接到amf(access and mobility management function,接入和移动性管理功能)115。术语“无线接入点”(wap)也用于一般地指到ng
‑
ran(例如,(多个)基站天线或(多个)传输点(tp),其可以耦合到gnb 110)的接入点,或者到无线局域网(wlan)中的an的接入点,其可以是基于ieee 802.11的。
38.如本文所使用的,ue 105可以是任何电子设备,并且可以被称为设备、移动设备、无线设备、移动终端、终端、移动站(ms)、安全用户平面位置(secure user plane location,supl)使能终端(supl enabled terminal,set)或其他名称。此外,ue 105可以对应于智能手表、数字眼镜、健身监视器、智能汽车、智能电器、蜂窝电话、智能电话、膝上型电脑、平板电脑、pda、跟踪设备、控制设备或一些其他便携式或可移动设备。ue 105可以包括单个实体或者可以包括多个实体,例如在个人区域网络中,其中用户可以使用音频、视频和/或数据i/o设备和/或身体传感器以及单独的有线或无线调制解调器。通常,尽管不是必须的,ue 105可以使用一种或多种无线电接入技术(rat)支持无线通信,该rat诸如全球移动通信系统(gsm)、码分多址(cdma)、宽带cdma(wcdma)、lte、高速率分组数据(hrpd)、ieee 802.11wifi(也称为wi
‑
fi)、(bt)、全球微波接入互操作性(wimax)、5g新无线电(nr)(例如,使用ng
‑
ran 135和5gcn 140)等。ue 105还可以支持使用wlan(例如,基于ieee 802.11标准或其变体)的无线通信,其可以使用例如数字订户线(dsl)或分组电缆连接到其他网络(例如,因特网)。对这些rat中的一个或多个的使用可以允许ue 105与外部客户端
130进行通信(例如,经由图1a中未示出的5gcn 140的元件,或者可能经由网关移动位置中心(gateway mobile location center,gmlc)125),和/或允许外部客户端130接收关于ue 105的位置信息(例如,经由gmlc 125)。
39.ue 105可以进入与可以包括ng
‑
ran 135的无线通信网络的连接状态。在一个示例中,ue 105可以通过向ng
‑
ran 135中的蜂窝收发器(诸如gnb 110)发送无线信号或从蜂窝收发器接收无线信号来与蜂窝通信网络进行通信。收发器向ue 105提供用户和控制平面协议终端,并且可以被称为基站、基站收发器站、无线电基站、无线电收发器、无线电网络控制器、收发器功能、基站子系统(bss)、扩展服务集(ess)或其他一些合适的术语。
40.在特定的实施方式中,ue 105可以具有能够获得位置相关测量的电路和处理资源。由ue 105获得的位置相关测量可以包括从属于sps或全球导航卫星系统(gnss)(诸如gps、glonass、伽利略或北斗)的sv 190接收的信号的测量,和/或可以包括从固定在已知位置(例如,gnb 110)的地面发送器接收的信号的测量。ue 105或可以由ue 105向其发送测量的独立位置服务器(例如,lmf(location management function,位置管理功能)120)然后可以基于这些位置相关测量使用若干定位方法(诸如,例如gnss、辅助gnss(assisted gnss,a
‑
gnss)、高级前向链路三边测量(advanced forward link trilateration,aflt)、到达时间差(tdoa)、观测到达时间差(observed time difference of arrival,otdoa)、wlan(也称为wifi)定位或增强型小区id(enhanced cell id,ecid)或其组合)中的任何一种来获得ue 105的位置估计。在这些技术的一些技术中(例如,a
‑
gnss、aflt和otdoa),可以至少部分地基于导频、定位参考信号(position reference signal,prs)或由发送器或卫星发射并在ue 105处接收的其他定位相关信号,在ue 105处测量相对于固定在已知位置的三个或更多地面发送器(例如,gnb 110)的伪距或时间差,或者相对于具有精确已知轨道数据的四个或更多个sv 190的伪距或时间差,或其组合。在一些实施例中,ue 105可以接收辅助数据,该辅助数据可以包括otdoa辅助数据和/或prs辅助数据,以便于信号测量和定位确定。
41.作为另一个示例,由ue 105获得的位置相关测量可以包括角度测量,诸如接收信号的到达角(aoa)。术语“到达角”(aoa)指的是相对于天线阵列的定向入射到天线阵列上的射频波的传播方向。作为一个示例,可以基于到达时间差(tdoa)或在天线阵列的各个元件处接收的无线电波的相位差测量来确定aoa。相反,术语“离开角”(aod)指的是从天线阵列发射的射频波相对于天线阵列的定向的传播方向。在一些实施例中,aoa和aod测量可以基于与诸如gnb 110的wap交换的信号来测量。例如,当gnb支持包括多用户多入多出(multi
‑
user multiple
‑
in multiple out,mu
‑
mimo)的多入多出(mimo)时,ue 105和/或另一个网络实体可以获得角度测量。在一些实施例中,ue 105和/或另一网络实体可以基于角度测量来确定ue定位信息。在一些实施例中,wap历书信息可以包括与天线几何形状相关的信息,在一些情况下,这些信息可以本地存储在ue 105上和/或由ue 105获得作为位置辅助信息。
42.诸如lmf 120的位置服务器可能能够向ue 105提供定位辅助数据,包括例如wap历书信息,与要测量的信号有关的信息(例如,预期信号定时、信号编码、信号频率、信号多普勒),地面发送器和/或wap(例如,gnb 110)的位置和身份和/或gnss sv 190的信号、定时和轨道信息(例如,地面历书数据或gnss卫星数据,诸如gnss历书和/或gnss星历信息),prs相关信息等,以促进定位技术,如a
‑
gnss、aflt、otdoa和ecid。
43.在一些实施例中,位置服务器(诸如lmf 120和/或另一网络实体)可以提供关于信号源的wap历书信息。信道可以包括los和nlos(或多径)信号的混合。当在wap和ue 105之间存在los条件时,通信信道可以包括来自发送器的los信号。例如,当在gnb 110
‑
1或gnb 110
‑
2和ue 105之间存在los条件时,则来自gnb 110
‑
1和gnb 110
‑
2的对应los信号可以分别穿过los路径141
‑
1或141
‑
2。因此,接收器(例如,ue 105)可以确定gnb 110
‑
1和gnb 110
‑
2分别是与信道141
‑
1和信道141
‑
2相关联的信号源。
44.此外,wap和ue 105之间的nlos信号可以被反射并经由不同的路径间接到达接收器。因为nlos路径较长,所以nlos信号可能相对于来自同一发送器的los信号被延迟。例如,反射器137
‑
1和反射器137
‑
2(例如,墙壁表面)可以分别反射来自gnb 110
‑
1和gnb 110
‑
2的信号。来自gnb 110
‑
1和gnb 110
‑
2的信号可以分别经由nlos路径145
‑
1和145
‑
2到达接收器ue105。因此,在一些实施例中,ue 105(接收器)可以将(虚拟)信号源139
‑
1和139
‑
2确定为与信道145
‑
1和145
‑
2相关联的信号源。在图1a中,虚拟信号源139的位置未按比例绘制。当信道中存在los条件(例如,分别为los路径141
‑
1或los路径141
‑
2)时,术语“信号源”可以指真实信号源或物理信号源(诸如,gnb 110
‑
1或gnb 110
‑
2),或者当对应信道存在nlos条件(例如,分别为nlos路径145
‑
1或nlos路径145
‑
2)时,可以指虚拟信号源或vap(例如,虚拟信号源139
‑
1或139
‑
2)。术语“信号源”可以指真实和虚拟信号源两者。因此,信号源可以与发送对应的信号的路径(los或nlos)和wap相关联。
45.在一些实施例中,lmf 120和/或另一网络实体可以获得和/或向ue 105提供位置辅助信息。位置辅助信息可以包括以下一个或多个:与ue 105周围的区域相关的wap历书信息。wap历书信息可以包括以下一个或多个:信号源(例如110
‑
1、110
‑
2、139
‑
1、139
‑
2等)的已知或确定的定位信息,已知或确定的信号源阻塞概率(例如,相对于当前或先前的ue定位和/或运动),已知或确定的天线几何形状信息(例如,对于多天线和/或多入多出(mimo)配置),影响rf传播的环境特征的已知或确定的位置,诸如反射器(例如,137
‑
1和/或137
‑
2)等。例如,当wap(例如,gnb 110)使用与wap相关联的天线阵列来支持mimo传输(诸如,单用户mimo(su
‑
mimo)或多用户mimo(mu
‑
mimo))时,则在一些情况下,位置辅助信息可以包括天线几何形状信息。mimo便于并行传送多个空间复用的数据信号,这些信号被称为多个空间流。在mu
‑
mimo系统中,一个wap可以同时向多个客户端ue发送信号,并且波束成形可以用于定向信号发送或接收。在波束成形中,相控阵天线中的元件被组合,使得某些角度的信号经历相长干扰,而其他角度的信号经历相消干扰。波束成形可用于在发送端和接收端实现空间选择性。天线几何形状知识可以帮助确定信道测量,包括到达角(aoa)、离开角(aod)、通用相位矢量等。在一些实施例中,新确定的信息(例如,与反射器137相关的定位信息、与信号源139相关的定位信息、信号源阻塞概率、天线几何形状信息等)可以在一定时间段内聚集,并用于使用本文公开的技术来更新现有的wap历书信息。
46.在一些实施例中,位置辅助信息可以被ue 105和/或另一网络实体用来确定ue 105的定位。定位技术也可以通过由ue 105获得的测量诸如惯性测量来促进,惯性测量可以包括速率(行进的速度和方向)和/或旋转参数。惯性测量可以由ue 105上的传感器(诸如惯性测量单元(inertial measurement unit,imu))获得。在一些实施例中,ue 105和/或另一网络实体可以使用ue 105的估计定位、ue运动模型(当可用时)和/或信号阻塞演化的时空模型(当可用时)和/或ue惯性测量来预测信号阻塞概率。例如,用于信号阻塞演化的ue运动
模型和/或时空模型对于机器人、无人驾驶飞机或(例如仓库中的)其他车辆可能是已知的或可用的,其移动/运动可以被编程和/或已知。
47.通过提高ue 105的信号获取和测量精度,并且在一些情况下,使ue 105能够基于信道测量和位置辅助数据计算其估计位置,可以促进ue定位确定。例如,位置服务器(例如,lmf 120)可以包括wap历书,该wap历书指示(多个)特定区域(例如,特定地点)中的蜂窝收发器和/或本地收发器的位置和身份,并且可以提供描述由诸如蜂窝基站(例如,gnb 110)的wap发送的信号的信息,例如作为位置辅助数据的传输功率和信号定时、物理天线端口标识符(pap id)、天线几何形状信息等。
48.ue 105可以获得与wap相关联的一个或多个信道的信道测量。每个测量的信道可以包括los信号和/或nlos信号。信道测量可以包括以下一个或多个:信道频率响应(channel frequency response,cfr)、信道脉冲响应(channel impulse response,cir)、功率延迟分布(power delay profile,pdp)等。例如,cir可以作为cfr的傅里叶逆变换获得。pdp是对通过多径信道接收到的信号强度作为时间延迟的函数的度量。信道测量还可以包括以下一个或多个:从蜂窝收发器和/或本地收发器接收的信号的信号强度(例如,接收信号强度指示(rssi)),和/或可以获得信噪比(snr)、参考信号接收功率(rsrp)、参考信号接收质量(rsrq)、到达时间(toa)或ue 105和wap(例如,诸如gnb 110的蜂窝收发器或诸如wifi接入点(ap)的本地收发器)之间的往返信号传播时间(rtt)。ue 105可以将这些测量传送到位置服务器,诸如lmf 120,以确定ue 105的位置,或者在一些实施方式中,可以将这些测量与从位置服务器(例如lmf 120)接收的或者由基站(例如gnb 110)广播的或者在本地(例如通过ue 105上的wap历书)获得的位置辅助数据一起使用,以确定ue 105的位置。
49.在otdoa的情况下,ue 105可以测量由附近的收发器对和基站(例如,gnb 110)发送的信号(诸如定位参考信号(prs)、小区特定参考信号(cell specific reference signal,crs)或跟踪参考信号(tracking reference signal,trs))之间的参考信号时间差(reference signal time difference,rstd)。rstd测量可以提供在ue 105处从两个不同的收发器接收的信号(例如,trs、crs或prs)之间的到达时间差。ue 105可以将测量到的rstd返回至位置服务器(例如,lmf 120),该位置服务器可以基于测量到的收发器的已知位置和已知信号定时来计算ue 105的估计位置。在otdoa的一些实施方式中,用于rstd测量的信号(例如,prs或crs信号)可以由收发器精确地同步到公共通用时间,诸如gps时间或协调通用时间(utc),例如,在每个收发器处使用gps或gnss接收器来精确地获得公共通用时间。
50.如图1a所示,ng
‑
ran 135中的成对的gnb 110可以彼此连接,例如,如图1a所示直接连接,或者经由其他gnb 110间接连接。经由ue 105和一个或多个gnb 110之间的无线通信向ue 105提供对5g网络的接入,一个或多个gnb 110可以代表ue 105使用5g(例如,nr)向5gcn 140提供无线通信接入。在图1a中,假设ue 105的服务gnb是gnb 110
‑
1,尽管如果ue 105移动到另一个位置,其他gnb(例如,gnb 110
‑
2和/或gnb 110
‑
3)可以充当服务gnb,或者可以充当辅助gnb,以向ue 105提供额外的吞吐量和带宽。图1a中的一些gnb 110(例如,gnb 110
‑
3)可以被配置为用作帮助仅定位信标,其可以发送信号(例如,定向prs)以辅助ue 105的定位,但是可以不从ue 105或其他ue接收信号。
51.如上所述,虽然图1a描绘了被配置为根据5g通信协议进行通信的节点,但是也可以使用被配置为根据其他通信协议(诸如,例如lte协议)进行通信的节点。这种被配置为使
position protocol a)(其可以被称为nppa或nrppa)进行通信。nrppa可以在3gpp技术规范(ts)38.455中定义,并且可以与3gpp ts 36.455中定义的lte定位协议a(lte positioning protocol a,lppa)相同、相似或是其扩展,nrppa消息经由amf 115在gnb 110和lmf 120之间传输。如图1a进一步所示,lmf 120和ue 105可以使用在3gpp ts 36.355中定义的lte定位协议(lte positioning protocol,lpp)进行通信,其中lpp消息经由ue 105的服务amf 115和服务gnb 110
‑
1在ue 105和lmf 120之间传输。例如,lpp消息可以使用传输协议(例如,基于ip)或基于服务的操作(例如,使用超文本传输协议(http))在lmf 120和amf 115之间传输,并且可以使用5g非接入层(nas)协议在amf 115和ue 105之间传输。lpp协议可用于支持使用ue辅助和/或基于ue的定位方法来定位ue 105,所述定位方法诸如辅助gnss(a
‑
gnss)、实时运动学(rtk)、无线局域网(wlan)、观测到达时间差(otdoa)和/或增强小区身份(ecid)和/或本文描述的其他方法。nrppa协议可用于支持使用基于网络的定位方法来定位ue 105(例如,ecid
‑
当与由基站110获得的或从gnb 110从ue 105接收的测量一起使用时,等等)和/或可以被lmf 120用来从gnb 110获得位置相关信息(例如,定义来自gnb 110的定位参考信号(prs)传输以支持otdoa的参数等)。
57.利用ue辅助定位方法,ue 105可以获得信道测量和/或位置测量(例如,信道测量,其可以包括对gnb 110、ng
‑
enb 114或wlan ap的rssi、rtt、rstd、rsrp和/或rsrq的一个或多个测量,或者对sv 190的gnss伪距、码相位和/或载波相位的测量),并且将测量发送到位置服务器(例如,lmf 120)用于计算ue 105的位置估计、源139的位置估计、信号源阻塞概率等等。利用基于ue的位置方法,ue 105可以获得位置测量(例如,其可以与ue辅助定位方法的位置测量相同或相似),并且可以计算ue 105的位置、源139的位置估计、信号源阻塞概率等(例如,在本地存储在ue 105上的辅助数据的帮助下,从诸如lmf 120的位置服务器接收或由gnb 110、ng
‑
enb 114或其他基站或ap广播)。利用基于网络的定位方法,一个或多个基站(例如,gnb 110和/或ng
‑
enb 114)或ap可以获得位置测量(例如,信道测量,其包括针对由ue 105发送的信号的rssi、rtt、rsrp、rsrq或toa的测量)和/或可以接收由ue 105获得的测量,并且可以将测量发送到位置服务器(例如,lmf 120),用于计算ue 105的位置估计、源139的位置估计、信号源阻塞概率等等。
58.由gnb 110使用nrppa向lmf 120提供的信息可以包括用于prs传输的定时和配置信息以及gnb 110的位置坐标、天线几何形状信息(例如,当gnb 110支持mu
‑
mimo时)等。然后,lmf 120可以经由ng
‑
ran 135和5gcn 140向ue 105提供这些信息和/或wap历书信息中的一些或全部作为lpp消息中的辅助数据。
59.根据期望的功能,从lmf 120发送到ue 105的lpp消息可以指示ue 105做多种事情中的任何一种。例如,lpp消息可以包含针对ue 105的指令,以获得gnss(或a
‑
gnss)、wlan和/或otdoa和/或一些其他定位方法的测量。作为一个示例,在otdoa的情况下,lpp消息可以指示ue 105获得在由特定gnb 110支持(或由一个或多个ng
‑
enb 114或enb支持)的特定小区内发送的prs信号的一个或多个测量(例如,rstd测量)。ue 105可以经由服务gnb 110
‑
1和amf 115在lpp消息中(例如,在5g nas消息中)将测量发送回lmf 120。
60.在一些实施例中,lpp可以由nr或ng定位协议(npp或nrpp)增强或替代,nr或ng定位协议支持诸如用于nr无线电接入的otdoa和ecid的定位方法。例如,lpp消息可以包含嵌入的npp消息或可以由npp消息替代。
61.当ng
‑
ran 135包括一个或多个ng
‑
enb 114时,ng
‑
enb 114可以使用nrppa与lmf 120通信,以支持ue 105的定位(例如,使用基于网络的定位方法)和/或可以允许ue 105和lmf 120之间经由ng
‑
enb 114和amf 115传输lpp和/或npp消息。ng
‑
ran 135中的ng
‑
enb 114和/或gnb 110也可以向ue(诸如ue 105)广播定位辅助数据。
62.如前所述,基于amf的位置解决方案使用amf作为目标ue的位置服务的主要锚点。在通信系统100的情况下,基于amf的位置解决方案将使用服务amf 115作为主要锚点以获得ue 105的一个或多个位置。然后,基于amf的解决方案可能要求针对ue 105的所有位置请求都通过,并由amf 115管理和协调。另一方面,基于lmf的位置可能需要所有位置请求通过,并且由目标ue的服务5gcn中的lmf管理和协调。在通信系统100的情况下,基于lmf的位置将使用服务lmf 120作为主要锚点以获得ue 105的一个或多个位置。对于基于周期性或触发事件的目标ue 105的多个位置,在需要较少的信令和处理以及使用较少的网络实体和网络接口方面,基于lmf的解决方案可能是优选的。本文公开的技术可以应用于基于lmf和amf的解决方案两者。
63.图1b是根据一个实施例的示例wlan通信系统150的图,该示例wlan通信系统便于确定移动设备的定位和/或确定与信号源相关的定位和其他信息。在一些实施例中,wlan通信系统150可以包括多个wap(例如ap 155),并且可以基于ieee 802.11标准(例如802.11revmc)或其变体。wlan ap 155
‑
1和155
‑
2可以形成an的一部分。ieee 802.11标准包括用于信道探测和测距的各种协议。ieee 802.11标准的某些版本支持包括mu
‑
mimo的mimo。如前所述,在传统系统中,与多径/nlos信号相关的误差(例如,可能在室内环境中普遍存在)可能会限制定位精度。wlan通信系统150可以包括可以无线通信的ue 105和ap 155。在一些实施例中,ue 105和ap 155可以使用网络170与服务器180通信。虽然系统150图示了单个ue 105和两个ap 155,但是系统150中的ue 105和ap 155的数量可以更大。
64.在一些实施例中,一个或多个ue 105和/或ap 155可以包括多个天线并且可以支持mimo,包括mu
‑
mimo。例如,ue 105和ap 155可以在5ghz频带上使用802.11ac进行通信,该频带可以支持mimo、mu
‑
mimo和多个空间流。在一些实施例中,ue 105和ap 155可以使用以上标准的一些进行通信,这些标准可以进一步支持非常高吞吐量(vht)(如以上标准中所述)和高效wlan(hew)和/或具有标准化探测和反馈机制的波束成形中的一个或多个。在一些实施例中,ue 105和/或ap 155可以另外支持用于与传统设备通信的传统标准。
65.在特定的实施方式中,ue 105可以具有能够获得位置相关测量的电路和处理资源。由ue 105获得的与位置相关测量可以包括从属于sps或全球导航卫星系统(gnss)的sv 190接收的信号的测量和/或可以包括可能在已知位置的ap 155接收的信号的测量。ue 105或可以由ue 105向其发送测量的独立位置服务器(例如,服务器180)然后可以基于这些位置相关测量使用多种定位方法(诸如,例如,gnss、辅助gnss(a
‑
gnss)、高级前向链路三边测量(aflt)、wlan定位技术(例如ftm)或其组合)中的任何一种来获得ue 105的位置估计。
66.作为另一示例,由ue 105获得的位置相关测量可以包括与接收到的信号相关的测距和角度测量,诸如aoa、aod、相位测量等,其可以使用ftm和/或系统150支持的其他协议获得。
67.诸如服务器180的位置服务器能够向ue 105提供定位辅助数据,其可以包括wap历书信息。位置辅助信息还可包括:例如,关于待测量信号(例如,预期信号定时、信号编码、信
号频率、信号多普勒)、ap(例如ap 155)和/或信号的位置和身份、gnss sv 190的定时以及轨道信息(例如,地面历书数据或gnss卫星数据,诸如gnss历书和/或gnss星历信息)的信息,以促进定位技术(诸如a
‑
gnss、aflt等)。在一些实施例中,位置服务器诸如服务器180和/或另一个网络实体可以提供关于信号源的wap历书信息。
68.ap 155和ue 105之间的通信信道可以包括los和nlos(或多径)分量。当ap和ue 105之间存在los条件时,通信信道可以包括来自发送器的los信号。例如,当在ap 155
‑
1或ap 155
‑
2和ue 105之间存在los条件时,则来自ap 155
‑
1和ap 155
‑
2的对应los信号可以分别穿过los路径151
‑
1或los路径151
‑
2。因此,接收器(例如ue 105)可以确定ap 155
‑
1和ap 155
‑
2分别是与los路径151
‑
1和los路径151 2相关联的信号源。
69.此外,ap和ue 105之间的nlos(多路径)信号可以被反射并经由不同的信道间接到达接收器。因为nlos路径较长,所以nlos信号可能相对于来自同一发送器的los信号被延迟。例如,反射器137
‑
3和反射器137
‑
4(例如,墙壁或建筑物)可以分别反射来自ap 155
‑
1和ap 155
‑
2的信号。来自ap 155
‑
1和ap 155
‑
2的信号可以分别经由nlos路径159
‑
1和nlos路径159
‑
2到达接收器ue 105。因此,在一些实施例中,ue 105(接收器)可以将虚拟信号源(或vap)139
‑
3和139
‑
4确定为分别与nlos路径159
‑
1和nlos路径159
‑
2相关联的信号源。在图1b中,虚拟信号源139的定位未按比例绘制。
70.在一些实施例中,服务器180和/或耦合至网络170的另一实体可以获得和/或向ue 105提供位置辅助信息。位置辅助信息可以包括以下一个或多个:与ue 105周围的区域相关的wap历书信息。wap历书信息可以包括以下一个或多个:信号源(例如155
‑
1、155
‑
2、139
‑
3、139
‑
4等)的已知或确定的定位信息、信号源阻塞概率(例如相对于当前或先前的ue定位和/或运动)、可用的天线几何形状信息(例如对于mimo/mu
‑
mimo或多天线配置)、影响rf传播的环境特征诸如反射器(例如137
‑
3和/或137
‑
4)等的已知或确定位置。在一些实施例中,新确定的信息(例如,与反射器137有关的定位信息、与信号源139有关的定位信息、信号源阻塞概率、天线几何形状信息等)可用于使用本文公开的技术更新现有的(例如,在服务器180和/或ue 105上的)wap历书信息。
71.在一些实施例中,位置辅助信息可以被ue 105和/或另一网络实体用来确定ue 105的定位、信号源的定位以及对应的信号阻塞概率。定位技术也可以通过由ue 105获得的测量诸如惯性测量来促进,惯性测量可以包括速率(行进的速度和方向)和/或旋转参数。惯性测量可以由ue 105上的传感器(诸如惯性测量单元(imu))获得。在一些实施例中,ue 105和/或另一网络实体可以使用ue 105的估计定位、ue运动模型(当可用时)和/或信号阻塞演化的时空模型(当可用时)和/或ue惯性测量来预测信号阻塞概率。
72.ue 105可以获得与ap相关联的信道的信道测量。信道可以包括los信号和/或nlos信号。信道测量可以包括以下一个或多个:信道频率响应(cfr)、信道脉冲响应(cir)、功率延迟分布(pdp)等,如前所述。ue 105可以将这些测量传送到位置服务器(诸如服务器180)以确定ue 105的位置,或者在一些实施方式中,可以将这些测量与本地存储和/或从位置服务器(例如服务器180)接收的位置辅助数据一起使用和/或由ap 155广播以确定ue 105的位置。
73.图2a示出了支持ue位置确定和/或信号源位置确定的方法200的流程图。在一些实施例中,方法200可由以下一个或多个执行:位置服务器(例如图1a中的lmf 120或图1b中的
classification,music)技术,包括诸如root
‑
music、循环music或平滑music等变体;利用旋转不变性技术进行信号参数的估计(estimation of signal parameters using rotational invariance techniques,esprit);矩阵束、空间交替广义期望最大化(space alternating generalized expectation
‑
maximization,sage)等。在一些实施例中,来自ue 105的惯性测量可用于通过利用多天线几何形状的不变性来解决随时间推移的模糊性。
87.在一些实施例中,每个信号源的唯一标识符、信号源的位置、对应的天线几何形状以及每个信号源的信号阻塞概率可以(例如,由ue 105)(例如,从lmf 120和/或服务器180和/或另一网络实体)被接收作为位置辅助信息,和/或可以由ue基于本地存储的wap历书信息来确定(例如,由ue 105确定和/或从网络实体或服务提供商接收或由网络实体或服务提供商更新)。
88.图2b示出了用于获得初始wap历书信息208的示例性过程。在一些实施例中,初始wap历书信息208可以基于已知的区域几何形状203(例如,指示各种相关环境特征诸如墙壁、障碍物、屏障、楼梯间、电梯井、结构等的位置的物理地图)来确定,区域几何形状203可能(例如通过信号反射、阻塞、衰减等)影响rf传播。区域几何形状203可以是电子或数字形式,并且可以从任何适当的来源获得(例如,在线公共地图数据库、政府信息或公共记录、由诸如仓库、建筑物等设施的所有者/经营者提供的地图等)。在一些实施例中,地图信息可以用来自rf勘测206的信息来注释或扩充。例如,rf勘测206可用于关联在各种地图定位可见的信号源,并(基于rf测量)为各种位置提供初始rf指纹。可以使用对应的唯一信号源标识符来识别每个信号源,并且wap历书信息208可以进一步包括对应的信号源位置(例如,根据已知的wap位置信息和/或使用rf勘测206确定的位置),以及在各种地图位置处的信号源的对应的信号阻塞概率。当信号源使用多天线配置和/或mimo时,wap历书信息208可以进一步包括关于对应的信号源的天线几何形状的信息。在一些实施例中,初始wap历书信息208(例如,基于区域几何地图203和rf勘测206)可以基于一个或多个ue 105的测量而随时间更新,如本文进一步概述的。
89.图2c关于(图2a中)框210,其示出了根据一个实施例的确定一组信号源和对应的信号源信息(例如,对应的信号源标识符、对应的信号源位置信息(诸如可能的位置)、信号源信号阻塞概率以及,如果适用的话,对应的天线几何形状)的方法。框210可以由ue 105、位置服务器(lmf 120和/或服务器180)、另一个网络实体或它们的某种组合来执行。
90.在框212中,可以接收第一用户设备(ue)定位信息。在一些实施例中,第一ue定位信息可以包括ue定位的概率密度函数。例如,第一ue定位信息可以由ue使用任何可用的方法来确定。在一些实施例中,可以使用ue 105的先前的定位信息(基于紧接先前的ue位置)。在一些实施例中,当使用滤波技术(例如贝叶斯滤波器)来确定ue定位时,滤波器的先前输出(例如,紧接在前的输出)可以被用作第一ue定位信息。
91.在框214中,基于第一ue定位信息和wap历书信息208,可以确定一组信号源(包括虚拟信号源)和该组中每个信号源的对应的信号源信息。在一些实施例中,该组信号源可以基于wap历书信息208来确定,并且可以包括基于第一ue定位信息可见或可能可见的信号源。对于该组中的信号源,信号源信息可以包括对应的信号源标识符、对应的信号源位置、对应的信号阻塞概率、以及(如果适用的话)天线几何形状。
92.参考图2a,在框220中,多个信号源可以与至少一组信道参数中的对应的信道参数
相关联。在一些实施例中,基于:(a)关于多个信号源的信息,以及(b)ue 105相对于多个信号源中每个信号源的位置信息(例如几何形状信息),以及(c)关于信道参数(例如aoa、aod、相位矢量等)的信息,框220可以提供信号源到信道参数的确定性映射,例如,每个信号源与对应的信道参数相关联、或者信号源到信道参数的一组可能映射,其中每个可能映射与概率质量函数相关联。
93.在框225中,基于ue的第一定位信息以及多个信号源与对应的信道参数的关联性,可以确定ue 227的第二定位信息。例如,ue的第二定位信息可以相对于进行多个信道测量的ue的第一定位。在一些实施例中,ue 227的第二定位信息可以包括ue定位的概率密度函数。在一些实施例中,概率密度函数可以通过滤波过程在多个测量实例中随时间更新,如下文进一步概述的(例如,在图2c中)。
94.在框230中,可以确定多个信号源中的至少一个信号源232的定位信息。在一些实施例中,至少一个信号源232的定位信息可以包括至少一个信号源的定位的概率密度函数。在一些实施例中,概率密度函数可以通过滤波过程在多个测量实例中随时间更新,如下文进一步概述的(例如,在图2c中)。在一些实施例中,滤波过程可以同时细化和/或输出第二ue定位信息和至少一个信号源定位。
95.在框235中,可以为至少一个信号源确定对应的信号阻塞概率237。
96.此外,在一些实施例中,在框240中,当适用时,可以确定对应的天线几何形状(例如,至少一个信号源包括多入多出(mimo)和/或多天线系统)。
97.在一些实施例中,ue 227的第二定位信息、至少一个信号源232的定位信息、至少一个信号源阻塞概率237和/或至少一个信号源天线几何形状242可以用于更新wap历书信息208。例如,至少一个信号源定位232、至少一个信号源阻塞概率237和/或至少一个信号源天线几何形状242可以随着时间被存储、(例如,数学地或统计地)聚集,并用于更新wap历书信息208。
98.在一些实施例中,框220到235可以使用贝叶斯滤波器实现。在一些实施例中,贝叶斯滤波器可以通过利用扩展卡尔曼滤波器(ekf)和高斯混合模型来实现。例如,在一些实施例中,可以通过将多个信道测量到与ue的第一定位信息相关联的多个信号源的映射提供给贝叶斯滤波器来确定ue的第二定位信息,其中贝叶斯滤波器预测ue的第二定位信息。在一些实施例中,ue的第一定位信息可以基于以下至少一个来确定:(a)由贝叶斯滤波器提供的ue的先前预测定位,以及以下中的一个或多个:(b)用于ue运动的运动模型,或者(c)与ue的速率和与ue相关联的旋转参数相关的惯性测量,或者(d)上述(a)至(c)的某种组合。
99.图2d示出了示例贝叶斯滤波器245的框图,示出了贝叶斯滤波器245的可能的输入和输出。如图2c所示,贝叶斯滤波器可以接收以下作为输入:(a)wap历书信息208,(b)第一或先前ue定位信息258(例如,在时间(t
‑
1)由贝叶斯滤波器245输出),以及(c)信道参数到信号源250的映射。贝叶斯滤波器245还可以选择性地接收以下一个或多个:(a)ue运动模型254,(b)ue时间阻塞模型255,其可以基于ue运动,以及(c)ue惯性测量252,其可以包括与ue速率和与ue相关联的旋转参数相关的测量。在一些实施例中,贝叶斯滤波器245可以处理上面的输入并且输出:(i)ue 227的第二定位信息(例如在时间t),(ii)至少一个信号源232的定位信息,(iii)对应于至少一个信号源的至少一个信号阻塞概率,以及(iv)如果适用,与至少一个信号源相关联的天线几何形状。
100.在一些实施例中,上面的输出(i)到(iv)可以被输入到框260,框260可以随着时间(例如,数学地或统计地)聚集对应的测量,并更新wap信息208。定位(例如在地图上)到对应的可见信号源信道参数的映射可以随着时间建立。例如,基于ue定位信息和定向信息,来自最近观察(例如,由贝叶斯滤波器245输出)的可见信号源的定位可以被数学地或统计地聚集(例如,在框260中),并用于更新wap历书信息208。
101.在一些实施例中,在框260中聚集的wap历书信息208可以是ue 105本地的,并且可以由ue 105(例如,使用框260中的功能)更新。在一些实施例中,位置服务器(例如,lmf 120和/或服务器180)或另一网络实体可以维护和更新wap历书信息,并且可以包括由框260提供的功能。例如,ue 105可以向位置服务器和/或另一个网络实体发送上面的输出(i)到(iv),位置服务器和/或另一个网络实体可以随着时间聚集接收的信息并更新wap历书信息208。在一些实施例中,当更新wap历书信息108时,位置服务器(例如,lmf 120和/或服务器180)或另一网络实体可以聚集在某个时间段内从多个ue 105接收的信息。在位置服务器和/或另一个网络实体维护和/或更新wap历书信息208的实施例中,更新的wap历书信息208可以被周期性地发送给ue(例如,根据一些预定的/约定的时间表)。
102.图3a和图3b示出了示出具有反射表面370的环境的示例场景,其中单个wap 350向ue 105发送信号,以示出方法200的操作。如图3a所示,在时间(t
‑
1),可以确定ue 105处于由p(t
‑
1)380给出的第一定位。在第一定位p(t
‑
1)380,ue 105和wap 350之间的通信信道可以包括los信号302,以及nlos信号310(从表面370
‑
1反射)、nlos信号320(从表面370
‑
2反射)、nlos信号330(从表面370
‑
3反射)和nlos信号340(从表面370
‑
4反射)。wap历书信息208(图3a中未示出)可以包括关于与ue 105的第一定位p(t
‑
1)380相关联的反射点(例如,表面370
‑
1、370
‑
2、370
‑
3和370
‑
4)的信息。图3a示出了虚拟源vs1、vs2、vs3和vs4。虚拟源vs1、vs2、vs3和vs4可以与wap历书信息208中的第一定位380相关联。
103.参考图3b,在时间t,ue 105可以移动到第二定位p(t)385。作为ue 105从p(t
‑
1)380移动到p(t)385的结果,ue 105和wap 350之间在定位p(t)385处的通信信道中的los和nlos信号的路径相对于定位p(t
‑
1)380处的对应的信号已经改变。如图3b所示,在p(t)385处,ue 105和wap 350之间的通信信道现在包括los信号305、nlos信号315(从表面370
‑
1反射)、nlos信号325(从表面370
‑
2反射)、nlos信号335(表面370
‑
3反射)和nlos信号345(从表面370
‑
4反射)。los信号305和nlos信号315、325、335和345(当ue处于定位p(t)385时)相对于对应的信号302、310、320、330和340(当ue处于定位p(t
‑
1)380时)分别遵循不同的路径。
104.当在第二定位p(t)385时,ue 105可以获得和与wap 350的通信信道相关的信道测量(例如,在图2a的框205中)。信道测量可以包括例如信道脉冲响应(cir)和其他测量。
105.信道参数(例如,aoa、aod、对应于los和nlos分量的相位矢量)可以基于第二定位p(t)385处的信道测量(例如,由ue 105)来确定(例如,在图2a中的框210中)。此外(例如,在图2c中的框212和214中),基于ue 105的第一定位p(t
‑
1)380,可以查询wap历书信息来提供可能在第一定位p(t
‑
1)380可见的多个虚拟源诸如虚拟源vs1、vs2、vs3和vs4,以及关于多个虚拟源的对应的信息,诸如对应的标识符、对应的位置等。例如,还可以(例如,在框210中,例如,由ue 105)确定ue 105相对于每个信号源(例如,wap 350、vs1、vs2、vs3和vs4)的姿态(例如,位置和定向)。
106.基于对应的确定的信道参数(例如,aoa、aod、相位矢量等)以及ue相对于每个信号
源的相对定位,信道参数可以(例如,在框220中,由ue 105)与多个信号源中的每一个相关联。
107.然后,可以基于ue 105的第一定位p(t
‑
1)380以及多个信号源与对应的信道参数的关联性来估计ue 105的第二定位p(t)385(例如,在框225中)。例如,可以将ue 105的第一定位p(t
‑
1)380以及多个信号源与对应的信道参数的关联性(例如,图2d中的信道参数到对应的信号源250的映射)输入到贝叶斯滤波器,该贝叶斯滤波器可以输出ue 105的第二定位p(t)385。在一些实施例中,在时间t,贝叶斯滤波器可以联合估计ue 105的第二定位p(t)385、信号源的对应的定位、对应的信号阻塞概率和(如果适用的话)对应的天线几何形状。
108.图4示出了根据一些公开的实施例的支持定位确定的示例性方法400的流程图。在一些实施例中,方法400可以用于更新wap历书信息208(例如,关于多个wap/信号源)。在一些实施例中,方法400可以由以下一个或多个来执行:(a)ue 105(例如,当wap历书信息208对于ue是本地的并且由ue维护时),或者(b)位置服务器(例如,lmf 120和/或服务器180),或者(c)另一个网络实体,或者(d)它们的组合。在一些实施例中,位置服务器可以形成5g核心网(5gcn)的一部分,并且可以包括位置管理功能(lmf)。
109.在框410中,可以在一段时间内接收多个信号源的第一信号源信息,其中对于多个信号源中的每一个,第一信号源信息可以包括对应的信号源定位信息、对应的信号阻塞概率信息、对应的信号源观察定位和指示观察时间的时间戳。第一信号源信息可以例如通过众包从多个移动设备获得。
110.在一些实施例中,区域的rf勘测(例如,rf勘测206)、该区域中和/或从该区域可见的信号源的已知天线几何形状、以及区域几何形状(例如,区域几何形状203,其可以包括关于该区域的环境特征的信息)可以用于获得和初始化初始wap历书信息208的一部分。
111.对于信号源,对应的第一信号源信息可以包括与信号源相关的多个测量、信息和/或观测。例如,信号源的对应的第一信号源信息可以包括观察信号源的观察位置、信号源的估计位置、信号阻塞概率、信号源天线几何形状等,其是在一段时间内获得的(在框410中)。
112.在框420中,可以通过聚集对应于多个信号源中的至少一个信号源的第一信号源信息来生成对应于至少一个信号源的至少一组信号源信息。在一些实施例中,对应于至少一个信号源的第一信号源信息的聚集可以基于至少一个信号源的观察定位。
113.对应于至少一个信号源的第一信号源信息可以被数学地和/或统计地组合,以获得对应于至少一个信号源的至少一组信号源信息。在一些实施例中,对应于至少一个信号源的至少一组信号源信息可以用于更新wap历书信息208。
114.在框430中,可以用至少一组信号源信息来更新wap历书信息208。例如,wap历书信息208可以有助于从定位信息确定信号源(与那些信号源相关的信息)。在一些实施例中,可以(例如,由lmf 120和/或服务器180)向一个或多个用户设备(ue)提供更新的wap历书信息作为位置辅助信息。
115.在一个实施方式中,可以接收第一用户设备(ue)定位信息,其中第一ue定位信息包括ue定位的概率密度函数,并且可以基于第一ue定位信息和更新的wap历书信息来确定包括虚拟信号源的一组可见信号源。例如,可以从用户设备(ue)接收第一ue定位信息作为位置辅助请求的一部分,并且响应于位置辅助请求,可以向ue提供位置辅助信息,其中位置辅助信息包括该组可见信号源。
116.图5示出了定位过程,本文称为ue辅助和基于ue的定位过程,由lmf 120用来支持基于ue的定位、ue辅助定位以及辅助数据的传送。该过程基于lmf 120和ue 105之间的lpp协议的使用,该协议在3gpp ts 36.355“lte定位协议(lpp)”中定义,但是也可以是npp或lpp与npp的组合。该过程的先决条件可以是服务amf 115已经将ue 105标识符和amf 115身份传递给lmf 120。ue标识符可以是supi或5g临时移动订阅标识符(5g
‑
tmsi)。当amf 115向lmf 120通知位置请求时,或者当amf 115向lmf 120传送位置事件报告时,可以传递ue标识符和amf 115身份。注意,术语“身份”、“标识符”和“地址”可以是相同的,并且在这里可以互换使用。
117.在图5中的阶段1,lmf 120向amf 115调用namf_communication_n1n2messagetransport服务操作,以请求向ue 105传送下行链路(dl)定位消息(例如,lpp消息)。服务操作包括dl定位消息和ue 105标识符。下行链路定位消息可以向ue 105请求位置信息、向ue 105提供辅助数据、或者查询ue 105的能力。
118.在阶段2,如果ue 105处于cm idle状态,则amf 115发起3gpp ts 23.502中定义的网络触发的服务请求过程,以建立与ue 105的信令连接。
119.在阶段3,amf 115在nas传输消息中将下行链路定位消息转发给ue 105。amf 115在nas传输消息中包括标识lmf 120的路由标识符(例如,lmf 120的全球地址,诸如ip地址)。
120.在阶段4,ue 105存储在下行链路定位消息中提供的任何辅助数据(例如,wap历书信息208),并执行由下行链路定位消息请求的任何定位测量和位置计算。
121.在阶段5,如果ue 105处于cm
‑
idle状态,则ue 105发起3gpp ts 23.502中定义的ue触发的服务请求,以便建立与amf 115的信令连接。
122.在阶段6,ue 105在包括在nas传输消息中的上行链路定位消息(例如,lpp消息)中向amf 115返回在阶段4中获得的任何位置信息或者返回在阶段3中请求的任何能力。可选地,上行链路定位消息可以携带对进一步辅助数据的请求。ue 105还包括在阶段3接收的nas传输消息中的路由标识符。
123.在阶段7,amf 115向阶段6中接收的路由标识符所指示的lmf(在该示例中是lmf 120)调用namf_communication_n1messagenotify服务操作。服务操作包括在阶段6中接收的上行链路定位消息和ue 105标识符。如果ue 105需要发送多个消息来响应在阶段3中接收到的请求,则可以重复阶段6和7。可以重复阶段1到7以发送新的辅助数据,并请求进一步的位置信息和进一步的ue能力。
124.图6示出了一个过程,本文称为网络辅助定位过程,lmf 20可以使用该过程来支持网络辅助和基于网络的定位。该过程可以基于在lmf 120和(r)an 135之间的3gpp ts 38.455“nr定位协议a(nrppa)”中定义的nrppa协议。该过程的先决条件可以是服务amf 115已经将ue 105标识符和amf 115身份传递给lmf 120。ue 105标识符可以是supi或5g
‑
tmsi。当amf 115向lmf 120通知位置请求时,或者当amf 115向lmf 120传送位置事件报告时,可以传递ue 105标识符和amf 115身份。
125.在图6中的阶段1,lmf 120向amf 115调用namf_communication_n1n2messagetransport服务操作,以请求向服务基站(例如,gnb 110或ng
‑
enb 114)传送针对ue 105的网络定位消息(例如,nrppa消息)。服务操作包括网络定位消息和ue 105标识
符。网络定位消息可以向(r)an 135请求ue 105的位置信息。
126.在阶段2,如果ue 105处于cm idle状态,则amf 115发起3gpp ts 23.502中定义的网络触发的服务请求过程,以建立与ue 105的信令连接。
127.在阶段3,amf 115在n2传输消息中向服务基站转发网络定位消息。amf 115在n2传输消息中包括标识lmf 120的路由标识符(例如,lmf 120的全球地址)。
128.在阶段4,服务基站获得在阶段3中请求的ue 105的任何位置信息。
129.在阶段5,服务基站在包括在n2传输消息中的网络定位消息中向amf 115返回在阶段4中获得的任何位置信息。服务基站还包括在阶段3接收的n2传输消息中的路由标识符。
130.在阶段6,amf 115向阶段5中接收的路由标识符所指示的lmf 120调用namf_communication_n2infonotify服务操作。服务操作包括在阶段5中接收的网络定位消息和ue 105标识符。可以重复阶段1到6以请求进一步的位置信息和进一步的(r)an能力。
131.图7示出了用于获得非ue相关联的网络辅助数据的过程,该网络辅助数据可以被lmf 120用来支持一个或多个ue诸如ue 105的定位。该过程可以不与ue 105的位置会话相关联。它可以用于从基站(例如,gnb 110或ng
‑
enb 114)获得网络辅助数据。该过程可以基于在lmf 120和(r)an 135之间的3gpp ts 38.455“nr定位协议a(nrppa)”中定义的nrppa协议。
132.在图7中的阶段1,lmf 120向amf 115调用namf_communication_n1n2messagetransport服务操作,以请求向(r)an 135中的基站(例如,gnb 110或ng
‑
enb 114)传送网络定位消息(例如,nrppa消息)。服务操作包括网络定位消息和目标基站身份。网络定位消息可以从(r)an请求定位相关信息。
133.在阶段2,amf 115在n2传输消息中向阶段1中指示的目标基站转发网络定位消息。amf 115在n2传输消息中包括标识lmf 120的路由标识符(例如,lmf 120的全球地址)。
134.在阶段3,目标基站获得在阶段2中请求的任何定位相关信息。
135.在阶段4,目标基站在包括在n2传输消息中的网络定位消息中向amf 115返回在阶段3中获得的任何定位相关信息。目标基站还包括在阶段2接收的n2传输消息中的路由标识符。
136.在阶段5,amf 115向阶段4中接收的路由标识符所指示的lmf 120调用namf_communication_n2infonotify服务操作。服务操作包括在阶段4中接收的网络定位消息和可能的目标基站身份。可以重复阶段1到5以从(r)an 135请求进一步的定位相关信息。
137.图8是示出图1a中所示的ue 105的硬件实现的示例的图。ue 105可以包括一个或多个处理器804。一个或多个处理器804可以使用硬件、固件和/或软件的组合来实现。对于硬件实现,一个或多个处理器804可以使用一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器、电子设备、其他电子单元来实现。
138.ue 105可以包括外部接口,即收发器814,其可以包括无线收发器802,用于与ng
‑
ran 135(例如基站诸如gnb 110或ng
‑
enb 114(如图1a所示))进行无线通信。收发器814还可以包括附加的收发器,诸如无线局域网(wlan)收发器806。本文使用的术语“收发器”是指任何上述类型的收发器。收发器814(例如,无线收发器802和/或wlan收发器806中的一个或多个)可以获得包括信道测量的rf测量,并且在一些情况下,可以向网络实体(例如,可以充
当lmf 120和/或服务器180的网络实体900)发送rf和其他ue测量。ue 105还可以包括sps接收器808,用于接收和测量来自sps sv 190(如图1a所示)的信号,处理器804可以使用该信号来确定ue定位信息。
139.ue 105还可以包括一个或多个传感器810,诸如惯性测量单元(imu)。imu可以包括(多个)三轴加速度计、(多个)三轴陀螺仪、电子罗盘和/或(多个)磁力计,可以向处理器804提供速度、定向和/或其他定位相关信息。在一些实施例中,处理器可以使用imu的输出来确定ue 105的定位和定向。传感器810还可以包括照相机、气压计等。
140.ue 105还可以包括用户接口812,用户接口812可以包括例如显示器、小键盘或其他输入设备,诸如显示器上的虚拟小键盘,用户可以通过其与ue 105接口。ue 105还包括一个或多个处理器804和存储器820,它们可以与总线816耦合在一起。ue 105的一个或多个处理器804和其他组件可以类似地与总线816、单独的总线耦合在一起,或者可以直接连接在一起或者使用前述的组合来耦合。存储器820可以包含可执行代码或软件指令,当由一个或多个处理器804执行时,该可执行代码或软件指令使得一个或多个处理器作为被编程为执行本文公开的一些或所有方法和流程(例如,在图2
‑
5中)的专用计算机来操作。
141.如图8所示,存储器820包括软件,当由一个或多个处理器804实现时,该软件实现本文描述的方法。图8示出了使用存储器820中的软件实现的功能,该软件可由一个或多个处理器804执行。然而,应当理解,诸如处理器中或处理器外的专用硬件、固件等组件或模块等,可以用于实现类似的功能。存储器820可以在处理器804内和/或处理器804外部实现。如本文所使用的,术语“存储器”指的是任何类型的长期、短期、易失性、非易失性或其他存储器,并且不限于任何特定类型的存储器或存储器数量,或者存储存储器的介质类型。
142.如图所示,存储器820可以包括位置请求单元822,其使得一个或多个处理器804能够接收(例如,经由无线收发器802和/或wlan收发器806)和处理来自无线网络中的第一位置服务器(例如,lmf 120或服务器180)的对ue的位置信息的(例如,周期性的或触发的)请求。在一些实例中,第一位置服务器可能已经从第一核心网络(cn)节点(例如,amf 115)接收到针对ue的周期性的或触发的位置的请求。此外,第一cn节点可能已经从另一实体(例如,gmlc 125)接收到针对ue的周期性的或触发的位置的请求。
143.存储器820可以包括rf测量单元824,其使得一个或多个处理器804能够获得和处理rf测量,包括来自由无线收发器802和/或wlan收发器806接收的信号的信道测量。
144.存储器820可以包括信号源参数单元825,其使得一个或多个处理器804能够例如基于wap历书信息和信道测量来确定与进行rf测量的信号源相关的信道参数,其中信道参数指示多个信号源相对于用户设备(ue)的第一定位信息的定位。在一些实施例中,信号源参数单元825可以使一个或多个处理器804能够将信号源与对应的信道参数相关联。信号源参数单元825还可以使一个或多个处理器804能够确定至少一个信号源的定位信息,该定位信息可以是例如信号源的定位的概率密度函数。信号源参数单元825还可以使一个或多个处理器804能够确定对应于一个或多个信号源的信号阻塞概率。信号源参数单元825还可以使一个或多个处理器804能够确定信号源的天线几何形状,例如,在信号源是多天线系统或支持多入多出(mimo)通信的情况下。信号源参数单元825可以进一步使一个或多个处理器804能够通过聚集对应于信号源的信号源信息来为信号源生成一组信号源信息。信号源参数单元825还可以使一个或多个处理器804能够基于ue定位信息和更新的wap历书信息来确
定包括虚拟信号源的一组可见信号源。
145.存储器820可以包括传感器测量处理单元830,其使得一个或多个处理器804能够处理由传感器810获得的imu和/或其他传感器测量。例如,传感器测量处理单元830可以通过确定和提供来自imu测量的速率(行进的速度和方向)和/或旋转参数来(例如,通过位置确定单元826)促进位置确定。
146.存储器820可以包括位置确定单元826,其使得一个或多个处理器804基于各种输入参数来确定ue的位置。在一些实施例中,位置确定单元826可以包括贝叶斯滤波器(例如,图2d中的贝叶斯滤波器245),并且可以包括执行图2
‑
7中描述的一个或多个功能或流程的功能。在一些实施例中,位置确定单元826可以包括运动模型(例如用于ue 105的ue运动模型254)和/或ue时间信号阻塞模型(ue时间信号阻塞模型255,其可以基于ue运动)。在一些实施例中,位置确定单元826可以基于ue 105的估计位置向wap历书信息208查询信号源信息。在一些实施例中,位置确定单元826可以使用来自sps接收器的测量、rf测量、传感器测量或其任意组合来确定ue 105的定位。
147.存储器820可以包括位置辅助单元828,其使得一个或多个处理器804能够从位置服务器(例如,网络实体900,其可以充当lmf 120和/或服务器180)获得、处理和/或存储位置辅助数据。例如,位置辅助数据可以包括wap历书信息208。由位置辅助单元828处理的信息可以用于(例如,由位置确定单元826)确定ue定位信息。
148.存储器820可以包括wap历书更新单元832,其使得一个或多个处理器804能够周期性地更新wap历书信息208。在一些实施例中,wap历书更新单元832可以包括执行图4中描述的一些或所有功能的功能。更新可以基于由ue 105获得的信息(例如,来自ue 105随时间的rf测量、rf勘测、区域几何形状信息等的组合)和/或基于从位置服务器(例如,lmf 120和/或服务器180)和/或另一网络实体接收的信息。例如,可以用信号源的定位信息、对应的信号阻塞概率和对应的天线几何形状来更新信号源的wap历书信息。例如,位置服务器(例如lmf 120和/或服务器180)和/或另一网络实体可以在一段时间内聚集关于信号源的信息,将信号源信息与地图上的位置相关联,并更新wap历书信息208。更新的wap历书信息208可以被提供给ue 105,并使用wap历书更新单元832提供的功能进行更新。
149.取决于应用,本文描述的方法可以通过各种手段来实现。例如,这些方法可以在硬件、固件、软件或其任何组合中实现。对于硬件实现,一个或多个处理器可以在一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器、电子设备、被设计为执行本文描述的功能的其他电子单元或其组合中实现。
150.对于涉及固件和/或软件的实施方式,方法可以用执行本文描述的单独功能的模块(例如,过程、功能等)来实现。任何有形地包含指令的机器可读介质都可以用于实现本文描述的方法。例如,软件代码可以存储在存储器中并由一个或多个处理器单元执行,使得处理器单元作为专用计算机操作,该专用计算机被编程为执行本文公开的所有或部分方法或流程(例如,在图2
‑
5中)。
151.如果在固件和/或软件中实现,则这些功能可以作为一个或多个指令或代码存储在非暂时性计算机可读存储介质上。示例包括用数据结构编码的计算机可读介质和用计算机程序编码的计算机可读介质。计算机可读介质包含物理计算机存储介质。存储介质可以
是计算机可以访问的任何可用介质。作为示例而非限制,这种计算机可读介质可以包括ram、rom、eeprom、cd
‑
rom或其他光盘存储设备、磁盘存储设备、半导体存储设备或其他存储设备,或者可以用于以指令或数据结构的形式存储期望的程序代码并且可以由计算机访问的任何其他介质;本文使用的磁盘和光盘包括压缩光盘(cd)、激光盘、光学光盘、数字多功能盘(dvd)、软盘和蓝光光盘,其中磁盘通常磁性地再现数据,而光盘用激光光学地再现数据。以上的组合也应该包括在计算机可读介质的范围内。
152.另外,除了存储在计算机可读存储介质上之外,指令和/或数据可以被提供为通信装置中包括的传输介质上的信号。例如,通信装置可以包括具有指示指令和数据的信号的收发器。指令和数据可以存储在计算机可读介质例如存储器910上。当存储的指令和数据由处理器904读取和执行时,指令和数据可以将一个或多个处理器配置为作为专用计算机运行,该计算机被编程为执行本文公开的方法和流程(例如,在图2
‑
5中)。因此,通信装置可以包括具有指示信息的信号的传输介质,以执行上述公开的功能。在第一时间,包括在通信装置中的传输介质可以包括信息的第一部分以执行所公开的功能,而在第二时间,包括在通信装置中的传输介质可以包括信息的第二部分以执行所公开的功能。
153.取决于应用,本文描述的方法可以通过各种手段来实现。例如,这些方法可以在硬件、固件、软件或其任何组合中实现。对于硬件实现,一个或多个处理器804可以在一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器、电子设备、被设计为执行本文描述的功能的其他电子单元或其组合中实现。
154.在一种实施方式中,无线网络中的实体(诸如ue 105)可以被配置为支持定位确定并且可以包括用于获得对于至少一个无线接入点(wap)的多个信道测量的部件,其中信道包括视线(los)和非los(nlos)信号,其可以是例如收发器814和具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如rf测量单元824。一种用于基于wap历书信息和对于至少一个wap的多个信道测量确定对应的至少一组信道参数的部件,其中信道参数指示多个信号源相对于用户设备(ue)的第一定位信息的定位,该部件可以是例如具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如信号源参数825。一种用于将多个信号源与至少一组信道参数中的对应的信道参数相关联的部件,该部件可以是例如具有专用硬件或者实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如信号源参数单元825。一种用于基于ue的第一定位信息和多个信号源与对应的信道参数的关联性来确定ue的第二定位信息的部件,该部件可以是例如具有专用硬件或者实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如位置确定单元826。
155.该实体还可以包括用于确定多个信号源中的至少一个信号源的定位信息的部件,该部件可以是例如具有专用硬件或者实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如信号源参数单元825。该实体还可以包括用于针对至少一个信号源确定对应的信号阻塞概率的部件,该部件可以是例如具有专用硬件或者实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如信号源参数单元825。该实体还可以包括用于确定至少一个信号源的天线几何形状的部件,其中该至少一个信号源包括多天线系统或支持多入多出(mimo)通信,该部件可以是例如具有专用硬件或实现存储器820中的
可执行代码或软件指令的一个或多个处理器804,诸如信号源参数单元825。该实体还可以包括用于用至少一个信号源的定位信息和至少一个信号源的对应的信号阻塞概率和至少一个信号源的天线几何形状更新wap历书信息的部件,该部件可以是例如具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如wap历书更新单元832。
156.用于确定ue的第二定位信息的部件,例如可以是具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如位置确定单元826,可以向贝叶斯滤波器提供ue的第一位定位信息以及多个信号源与对应的信道参数的关联性,其中贝叶斯滤波器确定ue的第二定位信息。
157.在一种实施方式中,无线网络中的实体诸如ue 105可以被配置为支持定位确定,并且可以包括用于在一段时间内接收多个信号源的第一信号源信息的部件,其中对于多个信号源中的每一个,第一信号源信息包括对应的信号源定位信息、对应的信号阻塞概率信息、对应的信号源观察定位、以及指示观察时间的时间戳,该部件可以是例如收发器814和具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如位置辅助单元828和rf测量单元824、信号源参数单元825和位置确定单元826。一种用于通过聚集对应于多个信号源中的至少一个信号源的第一信号源信息来生成对应于至少一个信号源的至少一组信号源信息的部件,该部件可以是例如具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如信号源参数单元825。一种用于用至少一组信号源信息更新无线接入点(wap)历书信息的部件,该部件可以是例如具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如wap历书更新单元832。
158.该实体还可以包括用于接收第一用户设备(ue)定位信息的部件,其中第一ue定位信息包括ue定位的概率密度函数,该部件可以是例如收发器814和具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如位置辅助单元828。一种用于基于第一ue定位信息和更新的wap历书信息来确定包括虚拟信号源的一组可见信号源的部件,该部件可以是例如具有专用硬件或实现存储器820中的可执行代码或软件指令的一个或多个处理器804,诸如信号源参数单元825。
159.图9是示出支持定位确定的网络实体900的硬件实施方式的示例的图。在一些实施例中,网络实体900可以是位置服务器(诸如lmf 120或者服务器180)。网络实体900可以是例如诸如5g核心网(5gcn)的无线网络的一部分。网络实体可以执行图2
‑
7中描述的所有或部分方法和流程。
160.在一些实施例中,网络实体900可以包括一个或多个处理器904。一个或多个处理器904可以使用硬件、固件和/或软件的组合来实现。对于硬件实现,一个或多个处理器804可以使用一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器、电子设备、其他电子单元来实现。
161.在一些实施例中,网络实体900可以包括例如硬件组件(诸如外部接口902),其可以是能够连接到ue 105、一个或多个服务器、gmlc(诸如gmlc 125和amf 115)的有线或无线接口。在一些实施例中,网络实体900可以包括一个或多个处理器904和存储器910,它们可
以与总线906耦合在一起。存储器910可以包含可执行代码或软件指令,当由一个或多个处理器904执行时,该可执行代码或软件指令使得一个或多个处理器作为被编程为执行本文公开的所有或部分方法和流程的专用计算机来操作,诸如图2
‑
7中概述的方法和流程。
162.如图9所示,存储器910包括软件,当由一个或多个处理器904实现时,该软件实现本文描述的方法。图9示出了使用存储器910中的软件实现的功能,该软件可由一个或多个处理器904执行。然而,应当理解,诸如处理器中或处理器外的专用硬件、固件等组件或模块可以用于实现类似的功能。存储器910可以在处理器单元内和/或处理器单元外部实现。如本文所使用的,术语“存储器”指的是任何类型的长期、短期、易失性、非易失性或其他存储器,并且不限于任何特定类型的存储器或存储器数量,或者存储存储器的介质类型。
163.如图所示,存储器910可以包括位置请求处理单元912,其使得一个或多个处理器904经由外部接口902接收位置请求并处理位置服务请求。在一些实施例中,位置服务请求可以包括位置辅助请求。当用作lmf 120时,位置请求处理单元912可以使一个或多个处理器904处理位置服务请求,诸如针对ue 105的移动终止位置请求(mobile terminated location request,mr
‑
lr)、移动发起位置请求(mobile originated location request,mo
‑
lr)或网络诱导位置请求(network induced location request,ni
‑
lr)。此外,处理器904可以使用控制平面接口和控制平面协议来接收位置服务请求并与至少一个其他实体通信。
164.存储器910可以包括位置信息单元914,位置信息单元914使得一个或多个处理器904经由外部接口902与至少一个其他实体诸如ue或ng ran通信,以获得由至少一个其他实体测量的ue的位置相关信息。例如,位置相关信息可以包括对于至少一个无线接入点(wap)的多个信道测量,其中信道包括视线(los)和非los(nlos)信号。
165.存储器910可以包括信号源参数单元915,其使得一个或多个处理器904能够例如基于wap历书信息和信道测量来确定与信号源相关的信道参数,其中信道参数指示多个信号源相对于用户设备(ue)的第一定位信息的定位。在一些实施例中,信号源参数单元915可以使一个或多个处理器904能够将信号源与对应的信道参数相关联。信号源参数单元915还可以使一个或多个处理器904能够确定至少一个信号源的定位信息,该定位信息可以是例如信号源的定位的概率密度函数。信号源参数单元915还可以使一个或多个处理器904能够确定对应于一个或多个信号源的信号阻塞概率。信号源参数单元915还可以使一个或多个处理器904能够确定信号源的天线几何形状,例如,在信号源是多天线系统或支持多入多出(mimo)通信的情况下。信号源参数单元915可以进一步使一个或多个处理器904能够通过聚集对应于信号源的信号源信息来为信号源生成一组信号源信息。信号源参数单元915还可以使一个或多个处理器904能够基于ue定位信息和更新的wap历书信息来确定包括虚拟信号源的一组可见信号源。
166.存储器910可以包括位置确定单元916,其使得一个或多个处理器904基于位置信息来确定ue的位置。在一些实施例中,位置确定单元916可以包括贝叶斯滤波器(例如贝叶斯滤波器245),并且可以包括执行图2
‑
7中描述的一个或多个功能或流程的功能。在一些实施例中,位置确定单元916可以包括运动模型(例如用于ue 105的运动模型254)和/或ue时间信号阻塞模型(例如ue时间信号阻塞模型255,其可以基于ue运动)。在一些实施例中,位置确定单元916可以基于ue 105的估计位置(例如,可以从ue 105或者从另一个实体接收,
或者基于ue 105的先前位置)向wap历书信息208查询信号源信息。在一些实施例中,位置确定单元916可以使用从ue 105和/或其他实体接收的测量来确定ue 105的定位。在一些实施例中,位置确定单元916可以包括运动模型(例如对于ue 105)和/或ue时间信号阻塞模型(ue时间信号阻塞模型255,其可以基于ue运动),其可以用于确定ue位置。
167.存储器910可以包括位置辅助单元918,其使得一个或多个处理器904确定待提供给ue 105的位置辅助数据。例如,位置辅助数据可以包括wap历书信息208。在一些实施例中,位置辅助单元918可以包括基于估计的或先前的ue定位来查询wap历书信息208的功能,以确定在该定位可见的信号源和对应的信号源信息。
168.在一些实施例中,存储器910可以包括wap历书更新单元920,其使得一个或多个处理器904能够更新wap历书信息208。在一些实施例中,wap历书更新单元920可以包括执行图4中描述的一些或所有功能的功能。更新可以基于由ue 105获得的信息(例如,来自ue 105随时间的rf测量、rf勘测、区域几何形状信息等的组合)。例如,wap历书更新单元920可以包括在一段时间内聚集关于信号源的信息的功能,将信号源信息与地图上的位置相关联的功能,并更新wap历书信息208的功能。
169.取决于应用,本文描述的方法可以通过各种手段来实现。例如,这些方法可以在硬件、固件、软件或其任何组合中实现。对于硬件实现,一个或多个处理器可以在一个或多个专用集成电路(asic)、数字信号处理器(dsp)、数字信号处理设备(dspd)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、处理器、控制器、微控制器、微处理器、电子设备、被设计为执行本文描述的功能的其他电子单元或其组合中实现。
170.对于涉及固件和/或软件的实施方式,方法可以用执行本文描述的单独功能的模块(例如,过程、功能等)来实现。任何有形地包含指令的机器可读介质都可以用于实现本文描述的方法。例如,软件代码可以存储在存储器中并由一个或多个处理器单元执行,使得处理器单元作为专用计算机操作,该专用计算机被编程为执行本文公开的所有或部分方法或流程(例如,在图2
‑
5中)。
171.如果在固件和/或软件中实现,则这些功能可以作为一个或多个指令或代码存储在非暂时性计算机可读存储介质上。示例包括用数据结构编码的计算机可读介质和用计算机程序编码的计算机可读介质。计算机可读介质包含物理计算机存储介质。存储介质可以是计算机可以访问的任何可用介质。作为示例而非限制,这种计算机可读介质可以包括ram、rom、eeprom、cd
‑
rom或其他光盘存储设备、磁盘存储设备、半导体存储设备或其他存储设备,或者可以用于以指令或数据结构的形式存储期望的程序代码并且可以由计算机访问的任何其他介质;本文使用的磁盘和光盘包括压缩光盘(cd)、激光盘、光学光盘、数字多功能盘(dvd)、软盘和蓝光光盘,其中磁盘通常磁性地再现数据,而光盘用激光光学地再现数据。以上的组合也应该包括在计算机可读介质的范围内。
172.另外,除了存储在计算机可读存储介质上之外,指令和/或数据可以被提供为通信装置中包括的传输介质上的信号。例如,通信装置可以包括具有指示指令和数据的信号的收发器。指令和数据可以存储在计算机可读介质例如存储器910上。当存储的指令和数据由处理器904读取和执行时,指令和数据可以将一个或多个处理器配置为作为专用计算机运行,该计算机被编程为执行本文公开的方法和流程(例如,在图2
‑
5中)。因此,通信装置可以包括具有指示信息的信号的传输介质,以执行上述公开的功能。在第一时间,包括在通信装
置中的传输介质可以包括信息的第一部分以执行所公开的功能,而在第二时间,包括在通信装置中的传输介质可以包括信息的第二部分以执行所公开的功能。
173.在一种实施方式中,无线网络中的实体(诸如网络实体900)可以被配置为支持定位确定,并且可以包括用于获得对于至少一个无线接入点(wap)的多个信道测量的部件,其中信道包括视线(los)和非los(nlos)信号,其可以是例如外部接口902和具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置信息单元914。一种用于基于wap历书信息和对于至少一个wap的多个信道测量确定至少一组对应的信道参数的部件,其中信道参数指示多个信号源相对于用户设备(ue)的第一定位信息的定位,该部件可以是例如具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如信号源参数单元915。一种用于将多个信号源与至少一组信道参数中的对应的信道参数相关联的部件,该部件可以是例如具有专用硬件或者实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如信号源参数单元915。一种用于基于ue的第一定位信息和多个信号源与对应的信道参数的关联性来确定ue的第二定位信息的部件,该部件可以是例如具有专用硬件或者实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置确定单元916。
174.该实体还可以包括用于确定多个信号源中的至少一个信号源的定位信息的部件,该部件可以是例如具有专用硬件或者实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如信号源参数单元915。该实体还可以包括用于针对至少一个信号源确定对应的信号阻塞概率的部件,该部件可以是例如具有专用硬件或者实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如信号源参数单元915。该实体还可以包括用于确定至少一个信号源的天线几何形状的部件,其中该至少一个信号源包括多天线系统或支持多入多出(mimo)通信,该部件可以是例如具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如信号源参数单元915。该实体还可以包括用于用至少一个信号源的定位信息和至少一个信号源的对应的信号阻塞概率和至少一个信号源的天线几何形状更新wap历书信息的部件,该部件可以是例如具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如wap历书更新单元920。
175.用于确定ue的第二定位信息的部件,例如可以是具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置确定单元916,可以向贝叶斯滤波器提供ue的第一位定位信息以及多个信号源与对应的信道参数的关联性,其中贝叶斯滤波器确定ue的第二定位信息。
176.在一种实施方式中,无线网络中的实体诸如网络实体900可以被配置为支持定位确定,并且可以包括用于在一段时间内接收多个信号源的第一信号源信息的部件,其中对于多个信号源中的每一个,第一信号源信息包括对应的信号源定位信息、对应的信号阻塞概率信息、对应的信号源观察定位、以及指示观察时间的时间戳,该部件可以是例如外部接口902和具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置信息单元914。一种用于通过聚集对应于多个信号源中的至少一个信号源的第一信号源信息来生成对应于至少一个信号源的至少一组信号源信息的部件,该部件可以是例如具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器
904,诸如信号源参数单元915。一种用于用至少一组信号源信息更新无线接入点(wap)历书信息的部件,该部件可以是例如具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如wap历书更新单元920。
177.该实体可以包括用于向一个或多个用户设备(ue)提供更新的wap历书信息作为位置辅助信息的部件,该部件可以是例如外部接口902和具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置辅助单元918。
178.该实体还可以包括用于接收第一用户设备(ue)定位信息的部件,其中第一ue定位信息包括ue定位的概率密度函数,该部件可以是例如外部接口902和具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置请求处理单元912、位置信息单元914或者位置确定单元916。一种用于基于第一ue定位信息和更新的wap历书信息来确定包括虚拟信号源的一组可见信号源的部件,该部件可以是例如具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如信号源参数单元915。例如,第一ue定位信息可以作为来自用户设备(ue)的位置辅助请求的一部分被接收,并且该实体还可以包括用于响应于位置辅助请求向ue提供位置辅助信息的部件,其中位置辅助信息包括一组可见信号源,该部件可以是例如外部接口902和具有专用硬件或实现存储器910中的可执行代码或软件指令的一个或多个处理器904,诸如位置辅助单元918。
179.虽然已经说明和描述了目前被认为是示例特征的内容,但是本领域技术人员将理解,在不脱离要求保护的主题的情况下,可以进行各种其他修改,并且可以替换等同物。此外,在不脱离本文描述的中心概念的情况下,可以进行许多修改以使特定情况适应所要求保护的主题的教导。
180.因此,意图要求保护的主题不限于所公开的特定示例,而是这种所要求保护的主题还可以包括落入所附权利要求及其等同物范围内的所有方面。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1