雷达、雷达组件和具有探测功能的设备的制作方法
1.本发明涉及雷达技术领域,尤其涉及一种雷达、雷达组件和具有探测功能的设备。
背景技术:
2.在自动驾驶、机器人和智慧交通或码头等领域,需要对空间环境中的物体做探测感知,需要对车辆、机器人周围和路口各方向做大角度范围的探测,例如:车载雷达需要覆盖车辆前方、侧方和后方等;机器人场景中所使用的雷达,需要对机器人周边较大范围(甚至要求360度)的覆盖;交通雷达和智慧码头场景中所使用的雷达,需要覆盖多个路口或车辆运动方向。不同的应用场景中,对雷达的探测角度是不同的,如何设计一种能够调节探测角度的雷达为业界研发的设计方向。
技术实现要素:
3.本技术实施例提供一种雷达、雷达组件及具有探测功能的设备,实现了能够调节探测角度,适配更多理应场景的雷达的设计。
4.第一方面,本技术实施例提供一种雷达,包括控制板、天线板和柔性连接部,控制板上设电控模块,天线板上设雷达模块,所述雷达模块包括信号收发模块和天线单元,所述信号收发模块通过所述天线单元收发射频信号。柔性连接部连接在所述天线板和所述控制板之间,通过所述柔性连接部上的走线实现所述电控模块和所述雷达模块的所述信号收发模块之间的电连接。
5.本技术通过柔性连接部连接在天线板和控制板之间,实现了天线板和控制板的安装位置的自由度,由于柔性连接部具有可弯折的特性,在具体的应用环境中,可以根据具体的探测角度的需求,确定天线板的朝向,本技术提供的雷达可以适配不同的应用场景,也就是说,在各种不同的天线板朝向需求的环境中,本技术提供的雷达都适用。
6.一种可能的实现方式中,所述天线板和所述柔性连接部的数量均为至少两个,至少两个所述柔性连接部一一对应地连接在至少两个所述天线板和所述控制板之间。本实施方式通过将天线板的数量设置为至少两个,也就是说,雷达模块的数量为至少两个,每个天线板与控制板之间均通过一个柔性连接部连接,每个天线板的安装角度都是可以调节的,至少两个天线板上的雷达模块共同用于探测信号,可以实现至少两个雷达模块的朝向不同,扩大雷达的探测视场角。而且,控制板和天线板之间的安装角度可以调整,可以根据具体的应用场景中的雷达的探测角度的需求,设置不同的安装角度,本技术不但能够满足大角度的探测信号的覆盖,还能够匹配不同的安装场景或应用场景。不同场景,探测信号覆盖角度需求也是不同的,例如应用在汽车和机器人的雷达可能180度的探测视场角就可以满足要求,而交通道路中的某些场景下,雷达的探测视场角需要360度探测。由于本技术的天线板和控制板通过柔性连接部连接形成一体式架构,在安装在具体的应用环境中,可以匹配不同的支撑结构,实现不同角度的覆盖,可见本技术提供的雷达的通用性较好。
7.一种可能的实现方式中,至少两个所述柔性连接部分别从所述控制板的不同的边
缘向外延伸。本实施方式通过限定柔性连接部分别从控制板不同的边缘向外延伸,可以保证不同的柔性连接部之间没有重叠的区域,由于柔性连接部需要传送探测信号,柔性连接部的不重叠、不交叉,可以防止信号之间的相互干扰,从物理位置上实现信号的隔离。
8.一种可能的实现方式中,所述天线板的数量大于或等于三个,所有的所述天线板分布在所述控制板的外围,部分环绕所述控制板。具体而言,本实施方式能够实现大于或等于90度的雷达信号的覆盖,能够覆盖180度或大于180度的视场角。本技术提供的雷达应用在180度雷达信号覆盖的场景中,不需要雷达信号覆盖的方向上,不设置天线板,有利于成本控制。
9.一种可能的实现方式中,所述天线板的数量为多个,所有的所述天线板分布在所述控制板的四周,构成环绕所述控制板的分布架构。具体而言,本实施方式能够实现360度的雷达信号的覆盖。本实施方式提供了一种探测角度最大化的方案,实现无死角的探测方案。
10.一种可能的实现方式中,所述天线板上的所述雷达模块为第一雷达模块,所述第一雷达模块中的所述信号收发模块为第一信号收发模块,所述第一雷达模块中的所述天线单元为第一天线单元,所述控制板上设有第二雷达模块,所述第二雷达模块包括第二信号收发模块和第二天线单元,所述第二信号收发模块通过所述第二天线单元收发射频信号,所述第二信号收发模块与所述电控模块电连接。两个雷达模块共同构建的探测方案能够实现大角度的探测范围,探测范围可调自由度更好。本实现方式将其中一个雷达模块设置在控制板上,设置在控制板上的雷达模块与控制板上的电控模块直接通过板内走线电连接,特别是射频信号,不但走线距离短,而且不需要穿过柔性连接部,因此,这个雷达模块的探测信号的能力(具体为功率)得到保障,外界对此雷达模块的收发信号的干扰也会控制在较小的程度,因此,本实施方式能够提升雷达的射频信号的功率和稳定性。
11.本技术一种实施方式提供了一种雷达,包括板组件、电控模块、至少两个雷达模块和柔性连接部。板组件包括控制板和至少一个天线板,电控模块设在控制板上,雷达模块分布在板组件上,各雷达模块均包括信号收发模块和天线单元,所有的所述信号收发模块均电连接至所述电控模块,所述信号收发模块通过所述天线单元收发射频信号。柔性连接部连接在天线板和控制板之间,通过所述柔性连接部上的走线实现所述电控模块和设于所述天线板上的所述雷达模块的所述信号收发模块之间的电连接。本技术通过将至少两个雷达模块分布在板组件上,且控制板和天线板之间通过柔性连接部连接,可以实现至少两个雷达模块的朝向不同,扩大雷达的探测视场角。前述任何一种可能的实施方式均适用于本实施方式的具体限定。
12.一种可能的实现方式中,其中一个所述雷达模块设置在所述控制板上,其余的所述雷达模块一一对应地分布在至少一个所述天线板上。本实现方式将其中一个雷达模块设置在控制板上,设置在控制板上的雷达模块与控制板上的电控模块直接通过板内走线电连接,特别是射频信号,不但走线距离短,而且不需要穿过柔性连接部,因此,这个雷达模块的探测信号的能力(具体为功率)得到保障,外界对此雷达模块的收发信号的干扰也会控制在较小的程度,因此,本实施方式能够提升雷达的射频信号的功率和稳定性。
13.一种可能的实现方式中,所述天线板和所述柔性连接部的数量均为至少两个,所述雷达模块一一对应的设置在所述天线板上。本实施方式中的雷达模块和天线板的数量是
一一对应的,也就是说,控制板上不设置雷达模块,可以减小控制板的尺寸,在具体的应用场景中,控制板可以设置在设备中的闲置区域,例如控制板隐藏在雷达组件的外壳的底部,这样,雷达组件上的外接连接器也可以设置在外壳的底部,方便控制板上的电控模块与连接器之间的电连接。而且连接器和控制板均设置在外壳的底部的区域,当雷达组件安装在具有探测功能的设备内时,方便接线,可以直接将此雷达组件的连接器插接在设备内的电路板上的对端连接器,通过电路板走线实现雷达组件与控制中心之间的电连接,有利于保证信号传输质量。
14.一种可能的实现方式中,柔性连接部为fpc(柔性电路板),柔性连接部与控制板和天线板为一体式结构,可以理解为,柔性连接部通过电路板制作工艺一体成型在控制板和天线板之间,这样,省去了柔性连接部和天线板之间的电连接结构(例如连接器),也省去了柔性连接部和控制板之间的电连接结构(例如连接器),使得本技术的雷达不但具有低成本的优势,一体化的结构也能够提升线路的稳定性。柔性连接部上的走线与控制板上的走线及天线板上的走线可以通过一次电路板布线工艺制作形成,这样的结构使得线路传输的信号具有更小的损耗,即能保证信号传输的质量,提升雷达的信号探测精确度及速度。
15.一种可能的实现方式中,所述柔性连接部均包括依次层叠设置的第一接地层、中间层和第二接地层,所述中间层和所述第一接地层为相邻的线路层,所述中间层和所述第二接地层亦为相邻的线路层,所述走线设置在所述中间层。本技术通过第一接地层和第二接地层对中间层进行隔离保护,能够减少外界对中间层的走线的干扰,保证信号传输的质量。
16.一种可能的实现方式中,所述走线包括探测信号线、控制信号线和电源线,所述柔性连接部设有多个地屏蔽孔,所述地屏蔽孔的两端分别连接至所述第一接地层和所述第二接地层,通过所述地屏蔽孔实现不同类型的所述走线之间的隔离。具体而言,在电源线和控制信号线之间设置地屏蔽孔,实现电源线和控制信号线之间的隔离,减少二者之间的相互干扰;在电源线和探测信号线之间设置地屏蔽孔,实现电源线和探测信号线之间的隔离,减少二者之间的相互干扰;在探测信号线和控制信号线之间设置地屏蔽孔,实现控制信号线和探测信号线之间的隔离,减少二者之间的相互干扰。
17.本技术通过地线和地屏蔽孔的设置,实现对信号线的全面隔离。具体而言,在柔性连接部所在的平面上,可以理解为,中间层所在的平面上,通过地线实现不同类型走线之间的隔离。通过二维方向的隔离结构,实现了对柔性连接部上的走线的全面保护。
18.第二方面,本技术提供一种雷达组件,包括支撑结构和第一方面任意一种可能的实现方式中的雷达,所述雷达的所述控制板和至少一个所述天线板分别安装在所述支撑结构的不同的表面上。
19.一种可能的实现方式中,雷达组件还包括角度调整结构,所述角度调整结构连接在所述支撑结构和所述天线板之间,以调整所述天线板的安装角度。
20.一种可能的实现方式中,雷达组件还包括外壳和天线罩,所述外壳内设容纳空间,所述支撑结构收容在所述容纳空间内且固定连接至所述外壳的内表面,所述天线罩连接至所述外壳且与所述雷达的所述雷达模块相对设置。本实施方式通过外壳和天线保护雷达,天线罩设置在雷达模块对应辐射方向上,实现雷达模块无障碍收发信号。
21.一种可能的实施方式中,雷达组件还包括线束和连接器,所述连接器设于所述外
壳的外表面,所述线束电连接在所述电控模块和所述连接器之间。本技术通过外置的连接器,能实现雷达模组与设备中的其它模组进行电连接。
22.一种可能的实现方式中,所述支撑结构包括相对的顶面和底面,以及连接在所述顶面和所述底面之间的多个侧面,所述控制板设于所述顶面,所述天线板设于所述侧面,所述外壳包括朝向所述底面的底壁,所述连接器位于所述底壁的外表面,所述线束穿过所述底壁。
23.一种可能的实现方式中,所述支撑结构包括相对的顶面和底面,以及连接在所述顶面和所述底面之间的多个侧面,所述侧面包括一个第一侧面和至少一个第二侧面,所述控制板位于所述第一侧面,所述天线板分布在所述第二侧面上,所述第一侧面和设有所述天线板的所述第二侧面均与所述天线罩相对设置。
24.一种可能的实现方式中,所述支撑结构包括相对的顶面和底面,以及连接在所述顶面和所述底面之间的多个侧面,所述控制板设于所述顶面,所述天线板设于所述侧面,所述支撑结构设有贯穿所述顶面和所述底面的通孔,所述线束穿过所述通孔。
25.第三方面,本技术提供一种具有探测功能的设备,包括控制中心和第二方面任意一种可能的实现方式中的雷达组件,所述雷达组件用于探测目标信号,并将所述目标信号传送至所述控制中心。
附图说明
26.为了更清楚地说明本发明实施例或背景技术中的技术方案,下面将对本发明实施例或背景技术中所需要使用的附图进行说明。
27.图1是本技术提供的雷达的第一种应用场景的示意图;
28.图2是本技术提供的雷达的第二种应用场景的示意图;
29.图3是本技术提供的雷达的第三种应用场景的示意图;
30.图4是本技术提供的雷达的第四种应用场景的示意图;
31.图5是本技术提供的第一种具体的实施方式中的雷达的示意图;
32.图6是本技术提供的第二种具体的实施方式中的雷达的示意图;
33.图7是本技术提供的第三种具体的实施方式中的雷达的示意图;
34.图8是本技术提供的第四种具体的实施方式中的雷达的示意图;
35.图9是本技术提供的第五种具体的实施方式中的雷达的示意图;
36.图10是本技术一种实施方式提供的雷达中的控制板上的电路布置图;
37.图11是本技术一种实施方式提供的雷达中的柔性连接部的层结构示意图;
38.图12是本技术一种实施方式提供的雷达中的柔性连接部中的中间层的布线示意图;
39.图13是本技术一种实施方式提供的雷达组件的立体示意图;
40.图14是本技术一种实施方式提供的雷达组件的示意图;
41.图15是本技术一种实施方式提供的雷达组件的示意图;
42.图16是图15所示的实施方式中的雷达的示意图;
43.图17是本技术一种实施方式提供的雷达组件的立体示意图;
44.图18是本技术一种实施方式提供的雷达组件的示意图;
45.图19是本技术一种实施方式提供的雷达组件的示意图。
具体实施方式
46.下面结合本发明实施例中的附图对本发明实施例进行描述。
47.本技术提供的雷达应用在雷达组件中,此雷达组件可以为探测装置,用于对空间环境中的物体做探测感知。本技术所述的探测装置可以是毫米波雷达,激光雷达等。雷达组件应用于具体的具有探测功能的设备,例如车辆、机器人、智慧码头及交通道路上所使用的探测设备等,可以覆盖众多场景,实现雷达探测功能。
48.本技术提供的雷达包括控制板和天线板,控制板和天线板通过柔性连接部连接。控制板设有电控模块。天线板设有雷达模块,雷达模块包括信号收发模块和天线单元。信号收发模块通过天线单元收发雷达射频信号。通过柔性连接部上的走线实现电控模块和设于天线板上的雷达模块的信号收发模块之间的电连接。
49.其中,本技术所述的天线单元为天线模块,本技术对天线单元中的辐射单元类型,辐射单元间距以及天线阵列大小不做限定。
50.可见,通过本技术的柔性连接部连接控制板和天线板,柔性连接部具有易弯折的特性,可以结合具体的探测角度的需求,确定天线板的朝向,本技术提供的雷达可以适配不同的应用场景。
51.可选的,本技术的天线板、控制板以及柔性连接部可以一体成型。柔性连接部通过电路板制作工艺一体成型在控制板和天线板之间,这样,省去了柔性连接部和天线板之间的电连接结构(例如连接器),也省去了柔性连接部和控制板之间的电连接结构(例如连接器),使得本技术的雷达不但具有低成本的优势,一体化的结构也能够提升线路的稳定性。
52.本技术提供的雷达组件包括所述的雷达和支撑结构。支撑结构可以对雷达的控制板和天线板分别进行固定或者说支撑,从而使得雷达探测方向更稳定,从而更好地应用于车载探测。
53.支撑结构为立体结构,本技术对支撑结构的具体形状、大小不做限制。
54.示例地,支撑结构可以用于对控制板上的控制模块进行固定或者说支撑,或者,支撑结构可以用于对天线板上的雷达模块进行固定或者说支撑。可以理解的是,控制板和天线板可以为柔性电路板结构,当控制板固定至支撑结构时,支撑结构为控制板上的控制模块提供刚性支撑,起到固定控制模块的作用,同理,当天线板固定至支撑结构时,支撑结构也能够为天线板上的雷达模块提供刚性支撑,固定雷达模块。
55.在具体的应用环境中,本技术提供的雷达可以匹配不同的支撑结构,实现不同角度的覆盖,可见本技术提供的雷达的通用性较好。
56.如图1所示,一种实施方式中,具有探测功能的设备1000为汽车,雷达组件100安装在车辆前保险杠中央或者前后左右四个角处,雷达组件100可以用于自动辅助驾驶。具体而言,雷达组件100可以为倒车雷达或前置雷达。应用在汽车上的雷达组件100作为一个安全装置,最大最明显的作用就是:在无能见度或能见度很差的情况下、或者遇到某些无法预测的障碍,向司机语音提示、蜂鸣警报等,从而防止或减少、减轻事故。如图1所示,在汽车的前端安装三个雷达组件100(为前置雷达),在汽车的后端安装两个雷达组件100(为倒车雷达)。具体而言,具有探测功能的设备1000内设控制中心200,此控制中心200与雷达组件100
中的雷达电连接,所述雷达组件100用于探测目标信号,并将所述目标信号传送至所述控制中心200。本技术示例的雷达(组件)安装位置仅为示例,本技术对雷达(组件)安装的位置不做限定。
57.如图2和图3所示,有探测功能的设备1000可以设置在智慧码头或交通道路上,例如,如图2所示,有探测功能的设备1000安装在路口的位置,探测功能的设备1000可以为路边的支架或者电线杆(或者其它的承载设备,例如临时车辆、岗亭等),雷达组件100安装在支架或电线杆上,用于探测此路口位置处的交通环境。如图3所示,有探测功能的设备1000安装在十字路中央安全岛上,用于探测十字路口位置周围的交通环境,有探测功能的设备1000可以为设置在十字路中央安全岛上的承载物(例如广告牌或指示牌),雷达组件100安装在此承载物上。
58.如图4所示,一种实施方式中,具有探测功能的设备1000为机器人,机器人的头部设有雷达组件100,雷达组件100可以位于机器人的头顶,以实现转动扩大控测角度,也可以位于机器人的其它位置,例如颈部、胸部等)。对于机器人而言,雷达探测为必要的功能组件,雷达组件100在机器人中为机器人的导航提供了便携有效的环境描述。例如机器人中的雷达组件100可以实现距离探测(或其它参数的探测),雷达组件100可以为激光雷达,激光雷达对距离的探测具有准确性和较好的方向性。
59.其它实施方式中,探测功能的设备1000也可以为设置在码头上的控制设备或建筑物上的监控设备。
60.具体而言,通过设置在雷达组件100内的雷达实现探测功能。
61.参阅图5至图8,本技术提供的雷达10包括板组件11、电控模块12、至少两个雷达模块13和至少一个柔性连接部14,板组件11包括控制板111和至少一个天线板112,电控模块12设置在控制板112上,至少两个雷达模块13分布在板组件11上,一种实施方式中,至少两个雷达模块13可以分别分布在控制板111和天线板112上,一种实施方式中,至少两个雷达模块13可以只分布在天线板112上(即控制板111上不设置雷达模块13)。各所述雷达模块13包括信号收发模块131和天线单元132,信号收发模块131均电连接至所述电控模块12,所述信号收发模块131通过所述天线单元132收发射频信号。柔性连接部14连接在天线板112和控制板111之间,当天线板112数量为两个或两个以上时,柔性连接部14与所述天线板112一一对应设置,以实现在安装环境下至少所述两个雷达模块13朝向不同,通过所述柔性连接部14上的走线实现所述电控模块12和设于所述天线板112上的雷达模块13中的信号收发模块131之间的电连接。
62.可选的,每个天线板112和控制板111之间可以通过多个柔性连接部14连接(图中未示出)。
63.可选的,雷达10还可以包括多个控制板111。天线板112可分别通过不同的柔性连接部14连接至多个控制板111。
64.接下来针对多种具体的实施方式对本技术提供的雷达10展开描述。
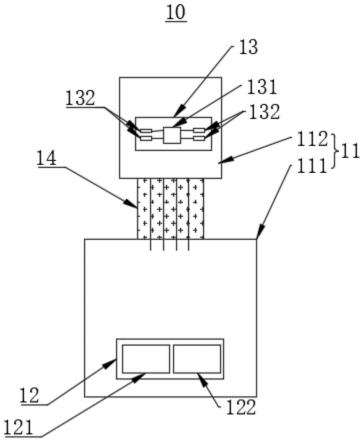
65.参阅图5,第一种具体的实施方式中,雷达10的板组件11包括一个控制板111和一个天线板112,柔性连接部14连接在天线板112和控制板111之间。由于控制板111和天线板112需要承载电子器件或电路,为保证电路的稳定性和使用寿命,控制板111和天线板112需要具有刚性。图5所示的实施方式中,天线板112上设雷达模块13,控制板111上设电控模块
12。雷达模块13均包括信号收发模块131和多个天线单元132,一种实施方式中,天线单元132分布在信号收发模块131相对的两侧,如图5所示,天线单元132的数量为四个,在信号收发模块131相对的两侧各设置两个天线单元132。其它实施方式中,多个天线单元132也可以环绕设置在信号收发模块131的外围,可以包围或半包围信号收发模块131。电控模块12包括电源模块121和控制模块122。电控模块12可以为设置在控制板111上的电路结构,也可以为设置在控制板111上的器件,例如控制芯片。一种实施方式中,电源模块121和控制模块122为两个彼此独立的电路模块,也可以为两个芯片,电源模块121和控制模块122之间通过控制板111上的走线、或电连接线缆、或柔性电路板(f lexib le pr inted ci rcu it,fpc)连接器实现电连接。其它实施方式中,电源模块121和控制模块122也可以集成为一个器件。通过柔性连接部14上的走线实现电控模块12和天线板112上的雷达模块13的信号收发模块131之间的电连接。
66.图5所示的实施方式,通过柔性连接部14连接在天线板112和控制板111之间,实现了天线板112和控制板111的安装位置的自由度,由于柔性连接部14具有可弯折的特性,在具体的应用环境中,可以根据具体的探测角度的需求,确定天线板112的朝向,这样,雷达10可以适配不同的应用场景,也就是说,在各种不同的天线板朝向需求的环境中,本实施方式提供的雷达10都适用。
67.参阅图6,第二种实施方式中,控制板111和天线板112上均设置雷达模块13,可以理解为,天线板112上的雷达模块13为第一雷达模块,控制板111上的雷达模块13为第二雷达模块,所述第一雷达模块中的所述信号收发模块为第一信号收发模块,所述第一雷达模块中的所述天线单元为第一天线单元,所述第二雷达模块包括第二信号收发模块和第二天线单元,所述第二信号收发模块通过所述第二天线单元收发射频信号,所述第二信号收发模块与所述电控模块电连接。一种实施方式中,控制板111的尺寸大于天线板112的尺寸。
68.图6所示的实施方式中,通过在控制板111和天线板112上均设置雷达模块13。在控制板111上,雷达模块13位于电控模块12和柔性连接部14所连接的边缘之间的位置,以方便布线。控制板111上的雷达模块13和天线板112上的雷达模块13分布在柔性连接部14的相对的两侧。电控模块12、位于控制板111上的雷达模块13、柔性连接部14和位于天线板112上的雷达模块13沿第一方向依次排布,这样排布方案有利于实现雷达的小尺寸设计,而且,在第一方向上依次排布使得电控模块12引出的走线也是沿第一方向延伸,方便布线,在制作过程中,能够节约制作成本,再者,走线沿同一方向布置,可以实现走线的距离最短化,能够减少走线所传输的信号的损耗。图6所示的各个模块的排布顺序仅为示例,本技术对此不做限制。
69.电源模块121电连接至控制模块122和信号收发模块131,电源模块121用于为控制模块121和信号收发模块131供电。其中,电源模块121和控制模块122之间的电连接通过控制板111上的走线实现,电源模块121与设置在控制板111上的雷达模块13中的信号收发模块131之间的电连接也是通过控制板111上的走线实现,电源模块121与设置在天线板112上的雷达模块13中的信号收发模块131之间的电连接通过控制板111的走线结合柔性连接部14上的走线及天线板112上的走线实现。
70.本实施方式通过将两个雷达模块13分别布置在控制板111和天线板112上,通过柔性连接部14连接在控制板111和天线板112之间,使得控制板111和天线板112安装在雷达组
件100中时,可以具有不同的朝向,而且控制板111和天线板112的固定角度较为自由,可以依据需求调整不同的角度,这样的方案能够实现雷达10具有较大的探测视角,即实现雷达大视场角(field of view,fov)的覆盖,而且应用的场景也较多,可以根据不同应用场景的需求调节控制板111和天线板112的具体的安装角度和朝向。
71.一种实施方式中,柔性连接部14为fpc(柔性电路板),柔性连接部14与控制板111和天线板112为一体式结构,可以理解为,柔性连接部14通过电路板制作工艺一体成型在控制板111和天线板112之间,这样,省去了柔性连接部14和天线板112之间的电连接结构(例如连接器),也省去了柔性连接部14和控制板111之间的电连接结构(例如连接器),使得本技术的雷达10不但具有低成本的优势,一体化的结构也能够提升线路的稳定性。柔性连接部14上的走线与控制板111上的走线及天线板112上的走线可以通过一次电路板布线工艺制作形成,这样的结构使得线路传输的信号具有更小的损耗,即能保证信号传输的质量,提升雷达10的信号探测精确度及速度。
72.参阅图7,第三种具体的实施方式中,电控模块和雷达模块的架构可以与第二种具体的实施方式中的电控模块12和雷达模块13相同,柔性连接部14、及柔性连接部14与天线板112和控制板111之间的结构关系(例如:一体式的结构及走线的形成方式)也可以与图6所示的实施方式(即第二种具体的实施方式)中描述的相同,不再赘述。本实施方式与图6所示的实施方式(第二种具体实施方式)的主要区别包括如下方面。
73.天线板112及柔性连接部14的数量不同。板组件11包括一个控制板111和多个天线板112,本实施方式中,所有的所述天线板112构成环绕所述控制板111的分布架构,以实现360度的雷达信号的覆盖。具体而言,例如,天线板112的数量为四个且分布在控制板111的四周。对应的,柔性连接部14也是四个,且分布在控制板111的四周。具体而言,控制板111为多边形(例如方形,控制板111包括四个边缘,或者五边形),柔性连接部14分别从控制板112的不同的边缘处延伸而出,本实施方式通过限定柔性连接部分别从控制板不同的边缘向外延伸,可以保证不同的柔性连接部之间没有重叠的区域,由于柔性连接部需要传送探测信号,柔性连接部的不重叠、不交叉,可以防止信号之间的相互干扰,从物理位置上实现信号的隔离。本实施方式提供的雷达10应用于360度雷达信号覆盖的场景中,提供了一种探测角度最大化的方案,实现无死角的探测方案。例如,如图3所示的应用场景。本实施方式中,雷达模块13的数量为五个,一一对应地设置在四个天线板112和一个控制板111上,即:其中一个所述雷达模块13设置在所述控制板111上,其余的所述雷达模块13一一对应地分布在至少一个所述天线板112上。
74.图7所示的实施方式中,控制板111上的雷达模块13用虚线框表示,可以理解为,根据具体应用场景的需求,控制板111上是否设置雷达模块13是可选的。
75.参阅图8,第四种具体的实施方式中,与图6所示的实施方式(第二种具体实施方式)的主要区别包括如下方面。
76.本实施方式限定天线板112的数量为大于或等于三个,所有的所述天线板112分布在所述控制板111的外围,部分环绕控制板111,即天线板112没有完全环绕控制板111,控制板111的某个方向上不设置天线板。本实施方式能够实现大于或等于90度的雷达信号的覆盖,能够覆盖180度或大于180度的视场角。如图8所示,天线板112的数量为三个,控制板111包括三个相邻的边缘,三个柔性连接部14分别从这三个相邻的边缘延伸而出且一一对应地
连接这三个天线板112。具体而言,控制板111呈梯形,此梯形的两腰和顶边位置分别位置柔性连接部14,此梯形的底边位置闲置。本实施方式提供的雷达10应用于180度雷达信号覆盖的场景中,例如,如图2所示的应用场景,不需要雷达信号覆盖的方向上,不设置天线板,有利于成本控制。图8所示的实施方式中,控制板111上的雷达模块13用虚线框表示,可以理解为控制板111上可以设置雷达模块13,也可以不设置雷达模块13。一种实施方式中,雷达模块13的数量为四个,一一对应地设置在三个天线板112和一个控制板111上。一种实施方式中,根据具体应用场景的需求,控制板111上的雷达模块13可以不设置。
77.参阅图9,第五种具体的实施方式中,与图6所示的实施方式(第二种具体实施方式)的主要区别包括如下方面。
78.本实施方式限定天线板112的数量为两个,两个天线板112可以布置在控制板111的相邻的边缘(如图9所示),两个天线板112也可以布置在控制板111的相对的两个边缘。图9所示的实施方式中,控制板111上的雷达模块13用虚线框表示,可以理解为控制板111上可以设置雷达模块13,也可以不设置雷达模块13。一种实施方式中,雷达模块13的数量为三个,一一对应地设置在两个天线板112和一个控制板111上。当然,控制板111上的雷达模块13也可以取消,即控制板111上不设置雷达模块13。
79.图10所示为本技术一种实施方式提供的雷达10中的控制板111上的电路布置图。控制板111上主要设置:电源模块121、控制模块122、信号收发模块131和天线单元132,电源模块121、控制模块122构成电控模块12,信号收发模块131和天线单元132构成雷达模块13。为了保证射频信号传输的质量,可以在控制板上111上设置滤波电路或其它匹配电路,滤波电路或其它匹配电路电连接至信号收发模块131,以实现射频信号的传输路径上的滤波、隔离或其它参数(例如频率、带宽、波束等)的匹配。电源模块121电连接至控制模块122,亦电连接至信号收发模块131,以实现控制模块122和信号收发模块131的上电。信号收发模块131电连接至控制模块122,以实现信号收发模块131与控制模块122之间的射频信号的传输。天线单元132用于收发射频信号并与信号收发模块131通信连接,具体而言,天线单元132和信号收发模块131通过rf馈线电连接,本技术将天线单元132和信号收发模块131集成为一个雷达模块30,设置在同一个电路板上,能够保证rf馈线尽量短,rf馈线不需要跨板,即本技术的柔性连接部14上不设置rf馈线,这样的架构有利于减少rf信号的衰减,可以提高雷达组件100的探测距离。
80.一种实施方式中,参阅图11,柔性连接部14包括至少三层,分别为第一接地层141、中间层142和第二接地层143,中间层142层叠设置在第一接地层141和第二接地层143之间,一种实施方式中,第一接地层141和中间层142为相邻的线路层(或者金属层、信号层、走线层),即第一接地层141和中间层142之间不设置其它的线路层,同样,第二接地层143和中间层142也为相邻的线路层。柔性连接部14上的走线设置在中间层142中,走线可以包括探测信号线、控制信号线和电源线。本技术通过第一接地层141和第二接地层143对中间层142进行隔离保护,能够减少外界对中间层142的走线的干扰,保证信号传输的质量。
81.由于中间层142布置了多种类型的走线,包括电源线、控制信号线、探测信号线等。一种实施方式中,柔性连接部14设置多个地屏蔽孔144,各所述地屏蔽孔144的两端分别连接至所述第一接地层141和所述第二接地层143。
82.参阅图12,图12所示为中间层142的布线示意图,走线包括电源线145、控制信号线
146和探测信号线147,具体而言,探测信号线147设置在电源线145和控制信号线146之间,电源线145、控制信号线146和探测信号线147可以相互平行。一种实施方式中,中间层142内还设置多根地线148,例如:地线设置在不同类型的走线之间,即电源线145和探测信号线147之间通过地线148隔离,探测信号线147和控制信号线146之间亦通过地线148隔离。地线148和地屏蔽孔144电连接,具体而言,多个地屏蔽孔144分布在地线148所在的位置,每根地线148上设置多个地屏蔽孔144。
83.一种实施方式中,在垂直于柔性连接部14所在平面的方向上,通过所述地屏蔽孔144实现不同类型的所述走线之间的隔离。一种实施方式中,在柔性连接部14所在的平面上,可以理解为,中间层142所在的平面上,通过地线实现不同类型走线之间的隔离。
84.具体而言,在电源线和控制信号线之间设置地线或地屏蔽孔,实现电源线和控制信号线之间的隔离,减少二者之间的相互干扰;在电源线和探测信号线之间设置地线或地屏蔽孔,实现电源线和探测信号线之间的隔离,减少二者之间的相互干扰;在探测信号线和控制信号线之间设置地线或地屏蔽孔,实现控制信号线和探测信号线之间的隔离,减少二者之间的相互干扰。地线和地屏蔽孔可以同时存在,这样,可以更好地实现隔离效果。
85.图13是本技术一种实施方式提供的雷达组件100的立体示意图。本实施方式中,雷达组件100包括支撑结构101和雷达10。支撑结构101用于固定(或者支撑)天线板112或者控制板111。支撑结构101为六面体结构,本技术对支撑结构的具体形状、大小不做限制。支撑结构101包括顶面1011、底面1012和四个侧面1013,顶面1011和底面1012相对设置,四个侧面1013连接在顶面1011和底面1012之间,顶面1011和底面1012可以为梯形,四个侧面1013的朝向不同。雷达10的控制板111固定在顶面1011,雷达10的三个天线板112分别固定在三个不同的侧面1013上。支撑结构101可以对雷达10的控制板111和天线板112分别进行固定或者说支撑,从而使得雷达10探测方向更稳定,从而更好地应用于车载探测。支撑结构101可以用于对控制板111上的控制模块12进行固定或者说支撑,或者,支撑结构101可以用于对天线板112上的雷达模块13进行固定或者说支撑。可以理解的是,控制板111和天线板112可以为柔性电路板结构,当控制板111固定至支撑结构101时,支撑结构101为控制板111上的控制模块12提供刚性支撑,起到固定控制模块12的作用,同理,当天线板112固定至支撑结构101时,支撑结构101也能够为天线板112上的雷达模块13提供刚性支撑,固定雷达模块13。
86.在具体的应用环境中,本技术提供的雷达可以匹配不同的支撑结构,实现不同角度的覆盖,可见本技术提供的雷达的通用性较好。
87.本实施方式中,雷达模块13一一对应地分布在天线板112上,本技术通过设置支撑结构101的侧面1013具有不同的朝向(可以根据具体的应用场景来设置不同的侧面1013的朝向),使得雷达模块13具有不同的朝向,从而实现收发不同方向的信号。本实施方式,能够实现180度或者大于180度的探测视场角的覆盖。当四个侧面1013均布置天线板112,即可以实现360度的探测视场角的覆盖。本实施方式中,控制板111上只设置电控模块12,其它实施方式中,控制板111上也可以布置雷达模块13。
88.对于支撑结构101而言,在顶面1011和侧面1013的连接处,可以通过弧面连接,这样,柔性连接部14与弧面贴合,可以对柔性连接部14进行较好的保护,若在顶面1011和侧面1013的连接处为尖角的结构,可能对柔性连接部14造成磨损。
89.支撑结构101可以为介质材料,或塑料材质,或金属材质,或其它非金属材质。
90.图14为本技术一种实施方式提供的雷达组件100的示意图。具体为将图13所示的支撑结构101和雷达10安装在设有天线罩的外壳内的示意图。如图14所示,外壳102内设收容空间1021,安装在雷达10的支撑结构101安装在此收容空间1021内。图14为外壳102的截面图,只能看到外壳102的一部分,这部分相当外壳102上的固定部,支撑结构101收容在收容空间1021中且固定在此固定部上。天线罩103连接至外壳102,一种实施方式中,天线罩103和外壳102的材质可以不同,例如,外壳102为金属材质,天线罩103为非金属或不具有射频信号屏蔽功能的材料,以利于透过射频信号,保证雷达10的收发信号的性能。图14所示的实施方式中,天线罩103为一体式的结构且具有三个不同朝向的面,以对应三个不同的天线板112上的雷达模块13。天线罩103和外壳102之间可以为一体成型结构,例如通过双料注塑成型工艺制作,当然天线罩103和外壳102也可以为分离式的结构,通过胶水固定或者卡扣固定或者螺丝固定等固定方式固定连接。
91.支撑结构101的一个侧面1013(没有设置天线板112的侧面)固定连接至外壳102的固定部,其它的三个侧面1013(设置天线板112的侧面)分别与三个天线罩103相对设置。图14所示的实施方式中,当支撑结构101的顶面1011上的控制板111上布置雷达模块13的情况下,可以在控制板111所对应的外壳的位置上设置天线罩103。
92.图14所示的实施方式中,外壳的外表面设连接器(未图示),此连接器用于与具有探测功能的设备中的控制中心电连接。连接器通过线束电连接至所述控制板111上的电控模块12上。
93.图13和图14所示的实施方式中,还可以在支撑结构101和天线板112之间设置角度调整结构,用于调整天线板112在支撑结构101上的安装角度,以改变天线板112上的雷达模块13的朝向。
94.参阅图15和图16,图15所示的实施方式中的外壳103、天线罩103和支撑结构101与图14所示的实施方式中的外壳、天线罩和支撑结构是相同的,图15所示的实施方式与图14所示的实施方式的区别在于雷达10不同。图15所示的实施方式中的雷达10的具体结构参见图16。
95.如图16所示,一种实施方式中,雷达10包括一个控制板111和两个天线板112,雷达10包括三个分别布置在一个控制板111和两个天线板112上的雷达模块13。各雷达模块13均包括信号收发模块131和天线单元132。控制板111通过柔性连接部14连接在两个天线板112之间,控制板111上还设置电控模块12,电控模块12包括电源模块121和控制模块122。
96.参阅图15,支撑结构101的顶面1011和底面均不用于安装雷达10。控制板111固定在支撑结构101的一个侧面1013上,两个天线板112固定在支撑结构101的另两个侧面1013上。可以理解为,支撑结构101的侧面包括一个第一侧面和两个第二侧面,控制板111位于第一侧面,天线板112分布在第二侧面上。其它实施方式中,第二侧面的数量也可以为一个、三个或更多个,对应的天线板112的数量也随之变化。
97.图17是本技术一种实施方式提供的雷达组件100的立体示意图。本实施方式中,雷达组件100包括支撑结构101和雷达10。支撑结构101可以为六面体结构(例如长方体或正方体)或者柱状结构(可以为方形柱状或圆柱或圆台等架构)。支撑结构101包括相对设置的顶面1011和底面(未图示),以及连接在顶面1011和底面之间的侧面1013。侧面1013可以为多
个平面首尾相接构成的环状架构,也可以为曲面围成的圆柱面。为了便于观看雷达10和支撑结构101之间的关系,图17只示意性地绘出了顶面1011和两个相邻的平面构成的侧面1013。本实施方式中,雷达10包括一个控制板111、四个天线板112和四个柔性连接部14。本实施方式提供的雷达10与图9所示的实施方式的雷达10的具体的结构是相同的,也可以与图6所示的雷达10为相同的架构。控制板111安装在支撑结构101的顶面1011,四个天线板112安装在侧面1013上,四个天线板112两两相对设置。如图17所示,支撑结构101包括四个侧面1031,这四个侧面两两相对围成方形空间,四个天线板112分别安装在四个侧面1013上。
98.图18为本技术一种实施方式提供的雷达组件100的示意图。具体为将图17所示的支撑结构101和雷达10安装在设有天线罩的外壳内的示意图。本实施方式中,外壳102包括相对设置的顶壁1021和底壁1022,以及连接在顶壁1021和底壁1022之间的侧壁1023。一种实施方式中,侧壁1023垂直于顶壁1021或底壁1022,顶壁1021和底壁1022之间可以互相平行。天线罩103安装在侧壁1023上,具体而言,可以在侧壁1023上设通孔,将天线罩103安装在此通孔内。支撑结构101的底面固定至外壳102的顶壁1021,支撑结构101的顶面1011朝向外壳102的底壁1022,即,固定在顶面1011上的控制板111朝向外壳102的底壁1022。天线板112连接至支撑结构101的侧面1013,天线板112和侧面1013之间设置角度调整结构105,通过所述角度调整结构105连接在所述支撑结构和所述天线板之间,以调整所述天线板112的安装角度。外壳102的底壁1022的外表面设置连接器106,通过线束107电连接在控制板111上的电控模块和连接器106之间,连接器106与具有探测功能的设备中的控制中心电连接,以实现雷达10和控制中心之间的通信连接及电连接。
99.一种实施方式中,控制板111上不设置雷达模块,有利于减小控制板111的尺寸,控制板111只在满足能够布置电控模块就可以了,不需要额外的面积布置雷达模块。在具体的应用场景中,控制板可以设置在雷达组件中的闲置区域,例如控制板隐藏在雷达组件的外壳102的底部(即底壁1022的内侧),这样,雷达组件100上的连接器106也可以设置在外壳102的底部(即底壁1022的外侧),本实施方式的好处在于:方便控制板111上的电控模块与连接器106之间的电连接,而且电连接的线缆的延伸路径较短,有利于保证信号的质量。而且连接器106和控制板111均设置在外壳102的底部的区域,当雷达组件100安装在具有探测功能的设备内时,方便接线,可以直接将此雷达组件100的连接器106插接在设备内的电路板上的对端连接器,通过电路板走线实现雷达组件与控制中心之间的电连接,有利于保证信号传输质量。
100.可以理解的是,本实施方式中的天线板112的数量可以为两个、三个或四个。控制板111上也可以设置雷达模块13。
101.图19为本技术一种实施方式提供的雷达组件100的示意图。具体为将图17所示的支撑结构101和雷达10安装在设有天线罩的外壳内的示意图。本实施方式中,支撑结构101的底面固定至外壳102的底壁1022,支撑结构101的顶面1011朝向外壳102的顶壁1021,即,固定在顶面1011上的控制板111朝向外壳102的顶壁1021。天线板112连接至支撑结构101的侧面1013,天线板112和侧面1013之间设置角度调整结构105,通过所述角度调整结构105连接在所述支撑结构和所述天线板之间,以调整所述天线板112的安装角度。所述支撑结构101设有贯穿所述顶面1011和所述底面的通孔1017,外壳102的底壁1022的外部设置连接器
106,通过线束107穿过外壳102的底壁1022及支撑结构101的通孔1017,且电连接在控制板111上的电控模块和连接器106之间,连接器106与具有探测功能的设备中的控制中心电连接,以实现雷达10和控制中心之间的通信连接及电连接。
102.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1