灰尘传感器的制作方法
灰尘传感器
1.本技术要求申请号为10-2020-0144253、申请日为2020年11月02日的韩国专利申请的优先权,该韩国专利申请的全部内容在此以引入方式并入本发明。
技术领域
2.本发明涉及灰尘传感器,更详细地,涉及可以自动调节光源的输出偏差的灰尘传感器。
背景技术:
3.随着人口的密集及车辆的剧增,大气污染变得更加严重,因而对灰尘的关注度逐渐提高,且对空气净化器的需求也日益增加。为了主动净化空气,空气净化器需要用于测量空气的污染程度,即,用于测量空气中的灰尘浓度的灰尘传感器。
4.灰尘传感器主要使用光电式灰尘传感器,图1概念性示出光电式灰尘传感器检测灰尘的原理。
5.光电式灰尘传感器在外罩形成有空气的流入部和流出部,使从流入部流入的空气经过空气通过路径并通过流出部排出,配置于空气通过路径的发光部向检测空间放射光,配置于空气通过路径的光接收部对由发光部放射并通过灰尘散射的散射光进行集光,利用光接收部的电信号来测量空气中所包含的灰尘的浓度。
6.当在通过空气通过路径的空气中没有灰尘或烟时,从发光部放射的几乎所有光将通过检测空间并到达未配置有光接收部的遮光区域,因此,光接收部的光接收量变得极少。相反,当在通过空气通过路径的空气中存在灰尘或烟时,从发光部放射的光的一部分通过检测空间的灰尘或烟而发生散射并入射到光接收部,从而光接收部的光接收量将会上升。
7.对此,能够以光接收部中所包含的光接收器件(或光电探测器)的输出变动为基础来检测通过空气通过路径的灰尘或烟的存在/不存在,并且以光电探测器的输出电平为基础来检测通过空气通过路径的灰尘或烟的浓度。
8.另一方面,对于每个灰尘传感器,光源所输出的光输出不可避免地发生偏差。为了补偿在灰尘传感器制造过程中的这种光输出偏差,需要如下的工序,即,在驱动光源的过程中利用额外的光学功率计来检测光源的光输出,并调节光源驱动电路以使光输出达到目标光输出。
技术实现要素:
9.本发明考虑到这种情况,本发明的目的在于,提供恒定地维持灰尘传感器中所包括的光源的光输出的方法。
10.本发明的再一目的在于,提供自动调节灰尘传感器中包括的光源的光输出的方法。
11.根据本发明一实施例的灰尘传感器的特征在于,包括:发光部,用于向流入的空气通过的路径放射光;以及光接收部,接收由流入的空气中包含的粒子散射的散射光并且将
其输出为电信号,发光部包括用于放射光的激光二极管以及用于调节向激光二极管供应的驱动电压的驱动电路,驱动电路以与激光二极管发光的光量成比例的测量值和基准值的比较结果为基础来调节脉冲形态的驱动电压的频率。
12.根据本发明另一实施例的调节灰尘传感器内光源的光量的方法的特征在于,包括以下步骤:测量与用于向灰尘传感器的空气通过路径放射光的激光二极管发光的光量成比例的值;将测量值与基准值进行比较;当测量值小于基准值时,提高以脉冲形态向激光二极管供应的工作电压的频率,当测量值大于基准值时,降低工作电压的频率。
13.因此,能够自动调节由于构成灰尘传感器的光源的偏差所引起的光输出偏差,在灰尘传感器的制造过程中减少调节光输出的工序,从而能够降低制造费用。
附图说明
14.被包括以提供对本公开的进一步理解并且被并入并构成本说明书的一部分的附图示出本公开的实施例并与描述一同用于说明本公开的原理。在附图中:
15.图1概念性示出光电式灰尘传感器感测灰尘的原理;
16.图2示出光电式灰尘传感器的结构;
17.图3示出灰尘传感器的光源放射的光脉冲;
18.图4示出检测灰尘浓度的光接收部输出的信号;
19.图5示出利用散射光的方式的灰尘传感器中的灰尘与信号的关系;
20.图6示出在现有灰尘传感器中调节光源的光输出的电路结构;
21.图7示出电源电路为了补偿光源的偏差而向光源供应的电压的范围;
22.图8示出根据本发明的光输出调节电路的结构;
23.图9示出以不同频率的脉冲波形供应光源输入电源的实施例;
24.图10示出按3步骤调节用于控制光源输入电源的脉冲波形的实施例;
25.图11示出根据本发明一实施例按多步骤调节光源输入电源的工作流程图。
具体实施方式
26.以下,参照附图,详细说明本发明的优选实施例。在整个说明书中,相同的附图标记实质上表示相同的构成要素。在以下的说明中,在判断为对于与本发明有关的公知功能或构成的具体说明使本发明的主旨不清楚的情况下,将省略对其的详细说明。
27.光电式灰尘传感器是由光电探测器接收由在空气中包含的灰尘等微细粒子散射而发生的散射光,并将其输出为电信号来测量灰尘的密集度的装置。
28.图2示出光电式灰尘传感器的结构。
29.光电式灰尘传感器包括:发光部,用于向传感器内部的空气通过路径放射光;以及光接收部,用于对因在空气通过路径流动的空气中包含的灰尘而散射的光进行集光,还可包括生成使空气经过流入口向空气通过路径流入并通过流出口排出的吸入力的风扇。
30.此外,灰尘传感器还可包括用于遮挡光的迷宫形路,以防止由发光部照射并且在未碰撞灰尘或粒子的情况下通过光接收部的检测空间的光在构成检测空间的壁面发生反射而回到光接收部或发光部。迷宫形路可以与发光部相向地配置。
31.灰尘传感器还可包括用于与用于控制灰尘传感器的工作的控制部连接的连接器
(未图示)。灰尘传感器通过连接器从控制部接收用于驱动发光部、光接收部及风扇的控制信号并向控制部传输光接收部的输出信号。
32.发光部可包括用于放射规定频带的光的光源和用于将从光源放射的光转换成平行光的光源透镜,光源可以为激光二极管(ld)或发光二极管(led),光源透镜可以是用于将散射光转换成平行光的准直透镜或将平行光转换成收敛光的凸透镜。
33.光接收部作为生成与所输入的光的量成比例的电信号的光电探测器,还可包括用于使入射的光向光电探测器集光的光接收透镜。
34.发光部向检测空间放射光,发光部与光接收部可配置成直角,以防止光接收部直接接收从发光部放射的光。在此情况下,发光部放射光的方向(x方向)和与光接收部接收光的表面垂直的方向(z方向)可相互垂直。即,发光部放射光的方向(x方向)、在流入口中流入空气的方向(y方向)及与光接收部的表面垂直的方向(z方向)均可相互垂直。
35.图2中,发光部在与从流入口流入空气并流动的方向(y方向)垂直的方向(x方向)上,朝向检测空间放射光,光电探测器由于朝向上方露出,从而接收由经过光电探测器的上方检测空间的空气中包含的粒子散射的、并且朝向光电探测器所占据的区域沿向下的方向(z方向)行进的光,并将其转换成与所入射的光的强度成比例的电信号。
36.风扇根据控制部的控制而驱动,产生吸入力来使空气按规定速度或压力在空气通过路径流动,所述风扇可配置于空气通过路径的末端,即,空气排出口附近。
37.如图3所示,发光部可周期性地以脉冲形态放射光,如图4所示,光接收部生成与向光电探测器入射的散射光的光量成比例的电信号并输出。
38.在光电式灰尘传感器中,即使在通过空气通过路径的空气中没有灰尘,从发光部放射的光也会在本体内发生散射反射,从而少量的光会被光接收部接收。由此,即使没有灰尘,光电探测器的输出信号的电平也具有一定值,光电探测器输出电平与通过空气通过路径的空气中包含的灰尘粒子的大小或体积成某种程度的比例浮动的信号。
39.灰尘浓度被定义为单位体积中包含的灰尘粒子的总重量。
40.向光电探测器入射的散射光与检测空间中所包含的灰尘粒子的大小或体积成比例,光电探测器的输出信号的电平也与灰尘粒子的体积成比例,因此,当大体积的粒子通过时,光电探测器的输出信号的电平变大,当通过体积小的粒子时,光电探测器的输出信号的电平变小。
41.因此,灰尘传感器通过光电探测器的输出信号确认灰尘粒子所占据的体积并将其换算成灰尘浓度,可将光电探测器的输出信号以规定电平的阈值电压截断并计算阈值电压以上的输出信号所占据的时间比重来确定通过空气通过路径的空气中包含的灰尘粒子所占据的总体积,将总体积乘以灰尘粒子的密度来计算灰尘浓度。
42.图5示出利用散射光的方式的灰尘传感器中灰尘与信号的关系,示出将光电探测器的输出信号以规定电平的阈值电压截断来以逻辑高(high)和逻辑低(low)输出的结果。
43.灰尘传感器在规定时间内(top),例如,在5~30秒钟内,在将光电探测器的输出信号以阈值电压截断的结果中求出逻辑高区间的时间长度之和(图5中的t1+t2+
…
+t8),并除以工作时间(top)来求出经过空气通过路径的空气与空气中包含的灰尘的体积比率(s),在此乘以灰尘粒子的密度来求出灰尘浓度。
44.可知在工作时间(top)期间内注入的空气的体积,可从输出信号知道在工作时间
(top)内注入的空气中包含的灰尘粒子的总体积,因此,可计算单位体积中所包含的灰尘粒子的体积比率。
45.图6示出在现有灰尘传感器中调节光源的光输出的电路结构,图7示出电源电路为了补偿光源的偏差而向光源供应的电压的范围,光源使用激光二极管(ld:laser diode)。
46.发光部为了驱动作为光源的ld而包括如图6所示的驱动电路。ld中包括的监控光电二极管(monitor pd)与电阻连接,从而可以测量监控pd的电压来计算在监控pd中流动的电流,在监控pd中流动的电流与ld输出的光输出成比例。
47.电源电路接收监控pd的电压,基于此,将向ld供应的电源电压或驱动电压的电平以连续波形(cw:continuous wave)形态调节,由此,通过控制使ld以一定电平输出光。
48.但是,每个ld在制造或流通过程中发生偏差,从而,即使供应相同电平的驱动电压,光输出也有可能不同。为了补偿这种ld的偏差,执行如下的光输出设置操作,即,监控pd与可变电阻连接,通过光学功率计测量ld的光输出并手动调节可变电阻,来使ld输出所需要电平的光。
49.灰尘传感器的增益根据ld的光输出改变,因此,需要恒定维持ld的光输出,并且需要减少每个灰尘传感器的偏差,因此,为了减少ld的初始输出偏差,需要执行每个灰尘传感器通过可变电阻来调节监控pd的输出电压的光输出设置操作。
50.确认ld的光输出具有+/-20%左右的偏差,这种程度对灰尘传感器的灵敏度产生较大的影响,因此必须执行通过可变电阻的光输出设置操作。
51.在ld中流动的电流(id)与电源电路驱动电压(vd)和ld的工作电压(vld)(vld约为1.7~1.8v)的电压差成比例,可表示为id
∝
(vd-vld)。
52.与ld的光输出偏差(+/-20%)相应地,驱动电压也需要能够在最大驱动电压(vd_max)与最小驱动电压(vd_min)之间变动,以使ld可以输出目标电平的光的方式手动调节可变电阻。
53.现有灰尘传感器的光源驱动电路中包括的电源电路以连续波形方式调节向作为光源的ld供应的驱动电压。
54.在本发明中,提供不是手动调节而是自动调节ld的光输出偏差的ld驱动电路,用固定电阻代替可变电阻来测量ld的监控pd的电压,将其与基准值进行比较,可根据比较结果,不是以连续波形方式而是以脉冲方式向ld供应电源,并通过改变脉冲宽度或脉冲的频率来调节供应的电源。
55.与监控pd连接的固定电阻的电阻值能够以ld的统计数据为基础确定,即以ld的初始输出的平均值为基准设定。
56.通过固定电阻测量的监控pd的电压通过模数转换器(adc)转换成数字数据并向控制器或微处理器输入,控制器对内部设定的基准值与数字数据进行比较,通过脉冲方式向ld供应电源,并可根据比较结果改变脉冲的宽或脉冲的频率。
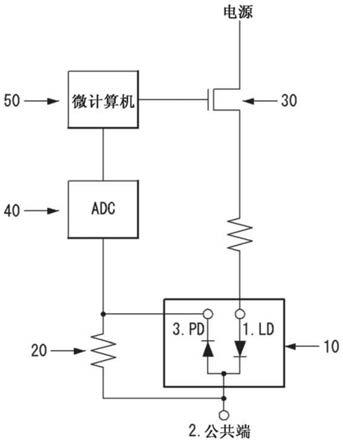
57.图8示出本发明的光输出调节电路的结构,图9示出以不同频率的脉冲波形供应光源输入电源的实施例。
58.如图8所示,调节ld 10的光输出的光输出调节电路或光源驱动电路可包括:固定电阻20,与包括在ld 10中的监控pd连接;电源开关30,用于对向ld 10供应的电源的供应进行切换;模数转换器40,用于将通过固定电阻20测量的监控pd的电压转换成数字数据;以及
微处理器50(或微计算机),在内部存储监控pd电压的基准值,将其与模数转换器40输出的数字数据进行比较来输出用于控制电源开关30的工作的控制信号。
59.微处理器50比较通过固定电阻20测量的监控pd的电压与内部设定的基准值即目标pd电压,当测量pd电压大于目标pd电压时,可将频率相对低的脉冲信号作为控制信号向电源开关30输出来降低向ld 10供应的驱动电压。
60.相反,当测量pd电压小于目标电压时,微处理器50可判断为ld10的光输出电平形成在低的一侧,将频率相对高的脉冲信号作为控制信号向电源开关30输出来提高向ld 10供应的驱动电压。
61.即,在图9的实施例中,2个不同频率的脉冲信号,即,低频脉冲信号和高频脉冲信号交替作为控制信号向电源开关30供应来调节向ld 10供应的驱动电压,从而能够调节ld 10的光输出电平。
62.图10示出按3步骤调节用于控制光源输入电源的脉冲波形的实施例。
63.在图9的实施例中,微处理器50交替输出固定的2个频率的脉冲信号,相反,在图10的实施例中,微处理器50对将预先规定的频率的初始脉冲信号作为控制信号向电源开关30输出来驱动ld 10并将测量的测量pd电压与目标pd电压(基准值)进行比较,并且在基于此生成第一个脉冲信号并输出的步骤1之后,还附加地进行比较测量pd电压与pd目标电压来调节脉冲信号的频率并输出的步骤2和步骤3,之后,在最后步骤3中确定的频率的脉冲信号一直作为控制信号输出,以控制向ld 10供应的驱动电压。
64.图10中示出如下情况,第一次测量pd电压大于目标pd电压,因此,经过3个步骤来逐渐降低向电源开关30供应的脉冲信号的频率,直到ld 10的光输出达到目标电平。
65.微处理器50在步骤1的调节下,ld 10的光输出还大于目标电平,所以在步骤2降低脉冲信号的频率来使ld 10的光输出与目标电平的差比步骤1时小,在步骤2的调节下,ld 10的光输出还大于目标电平时,在步骤3进一步降低脉冲信号的频率来使ld 10的光输出与目标电平的差比步骤2时小,以使ld 10的光输出与目标电平的差能够处于所需范围以内。
66.图10中示出使进行下一步骤时的调节向电源开关30供应的脉冲信号的频率的调节步长(step)恒定的示例。
67.当在各个步骤中测量的ld 10的光输出与目标电平的差或者测量pd电压与目标pd电压的差并不处于允许范围以内时,可在下一步骤中调节脉冲信号的频率,调节的频率的调节步长可以是恒定的,或者也可以在进行步骤的过程中逐渐减小频率调节步长。
68.在使频率调节步长恒定的情况下,光输出(或测量pd电压)能够迅速达到目标电平附近,但有可能无法接近目标电平允许范围以内,而是继续反复进行步骤而无法以单一频率的脉冲信号驱动电源开关30。
69.相反,在逐渐减小频率调节步长的情况下,到达目标电平的时间或许稍微延迟,但光输出(或测量pd电压)能够接近目标电平的允许范围以内,所以在进入到目标电平允许范围以内的最后步骤中确定的频率被确定为驱动电源开关30的最终脉冲信号的频率,从而能够以相应频率的脉冲信号来一直驱动电源开关30。
70.或者,在每个步骤中计算测量pd电压与目标pd电压的差值,只要该差值的符号与之前步骤的符号相比没有改变时,在相应步骤中使调节脉冲信号的频率的大小即频率调节步长与之前步骤的步长相同,但是当差值的符号与之前步骤的符号不同时,在相应步骤中
可以使频率调节步长小于之前步骤的步长。
71.图11示出根据本发明的一实施例按多步骤调节光源输入电源的工作流程图。
72.微处理器50将以初始频率设定并生成的脉冲信号作为控制信号向电源开关30供应,并向ld 10供应电源,对应于驱动电压调节的第一步骤,设定为n=1(步骤s10)。
73.ld 10因供应电源而发光,通过固定电阻20检测ld 10中包括的监控pd的电压,即,测量pd电压(vm),模数转换器40将测量pd电压(vm)转换成数字数据(dm)并向微处理器50输出(步骤s11)。
74.微处理器50将与测量pd电压(vm)对应的数字数据(dm)与内部设定的目标值(或基准值)(dt)进行比较,判断数字数据与目标值的差(|dm-dt|)是否大于或小于允许值d(步骤s12)。
75.当数字数据与目标值的差(|dm-dt|)小于允许值d(在步骤s12中的否(no))时,微处理器50判断为ld 10的光输出电平达到目标电平,并结束向ld 10供应的驱动电压的调节操作,以当前设定的脉冲信号的频率输出控制信号。
76.相反,当数字数据与目标值的差(|dm-dt|)大于允许值d(在步骤s12中的是(yes))时,微处理器50继续执行调节控制电源开关30的脉冲信号的频率(或脉冲宽度)来调节ld 10的光输出电平的操作。
77.微处理器50确认数字数据与目标值的差值(dm-dt)的符号是否与之前步骤的符号相同或不同(步骤s13)。
78.当数字数据与目标值的差值(dm-dt)的符号与之前步骤的符号相反时(在步骤s13中的是(yes)),微处理器50将调节脉冲信号的频率的频率调节步长的大小设成小于之前步骤的步长(步骤s14),反之,并不改变频率调节步长的大小。
79.微处理器50判断数字数据大于或小于目标值(步骤s15),当数字数据大于目标值时(在步骤s15中的是(yes)),将脉冲信号的频率减小频率调节步长来向下调节(步骤s16),当数字数据小于目标值时(在步骤s15中的否(no)),将脉冲信号频率增大频率调节步长来向上调节(步骤s17)。
80.之后,微处理器50为了在相应步骤中结束脉冲信号的频率调节并进行下一步骤而将n增加1(步骤s18),并确认n是否大于规定次数(n)(步骤s19),当n小于n时(在步骤s19中的否(no)),回到步骤s11,当n大于n时(在步骤s19中的是(yes)),结束向ld 10供应的驱动电压的调节操作。在图10的实施例中,n对应于3。
81.图11的自动调节ld偏差的功能可以在灰尘传感器内实现而每当灰尘传感器操作时执行,或者也可以在制造灰尘传感器的过程中执行一次并将最终确定的脉冲信号的频率存储在内部非易失性存储器,在使灰尘传感器操作时,根据存储于存储器的值生成脉冲信号并驱动电源开关来向ld供应电源。
82.因此,即使光源发生偏差,也能够以按规定电平输出光的方式自动控制光源,由此,每个灰尘传感器都可以维持恒定的灰尘传感器的灵敏度。
83.在本说明书中,对于灰尘传感器可以进行如下说明。
84.根据一实施例的灰尘传感器可包括:发光部,用于向流入的空气通过的路径放射光;以及光接收部,接收由流入的空气中包含的粒子散射的散射光并且将其输出为电信号,发光部包括用于放射光的激光二极管以及用于调节向激光二极管供应的驱动电压的驱动
电路,驱动电路以与激光二极管发光的光量成比例的测量值和基准值的比较结果为基础来调节脉冲形态的驱动电压的频率。
85.在一实施例中,驱动电路可包括:电阻,与激光二极管中包括的监控pd相连接;模数转换器(adc),用于将电阻的电压转换成数字数据以作为测量值输出;处理器,以测量值和基准值为基础来输出脉冲形态的控制信号;以及开关,根据控制信号来切换向激光二极管供应的驱动电压。
86.在一实施例中,当测量值小于基准值时,处理器可提高控制信号的频率,当测量值大于基准值时,处理器可降低控制信号的频率。
87.在一实施例中,当测量值与基准值的差处于允许范围内时,处理器可将控制信号的频率存储在非易失性存储器,并且以所存储的值的频率输出控制信号。
88.在一实施例中,处理器可以使作为改变控制信号的频率的量的频率调节步长恒定。
89.在一实施例中,处理器可以使作为改变控制信号的频率的量的频率调节步长可变。
90.在一实施例中,当测量值与基准值的差值的符号改变时,处理器可将频率调节步长减小为小于先前值。
91.根据另一实施例的调节灰尘传感器内光源的光量的方法,其特征在于包括以下步骤:测量与用于向灰尘传感器的空气通过路径放射光的激光二极管发光的光量成比例的值;将测量值与基准值进行比较;以及当测量值小于基准值时,提高以脉冲形态向激光二极管供应的工作电压的频率,当测量值大于基准值时,降低工作电压的频率。
92.在一实施例中,可以确认测量值与基准值的差是否处于允许范围内,当差处于允许范围以内时,以当前设定的频率向激光二极管供应工作电压。
93.在一实施例中,可以在提高或降低工作电压的频率的步骤中,使作为改变频率的量的频率调节步长恒定或可变。
94.在一实施例中,可以在测量值与基准值的差值的符号改变时,将频率调节步长减小为小于先前值。
95.本发明并不局限于所记载的实施例,在不超出本发明的思想及范围的情况下可以进行多种修改及变形对本发明所属技术领域的普通技术人员来说是显而易见的。因此,这种修改例或变形例应属于本发明的权利要求保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1