一种FOV测试装置的制作方法
一种fov测试装置
技术领域
1.本实用新型属于fov测试技术领域,具体涉及一种fov测试装置。
背景技术:
2.在光学仪器中,以光学仪器的镜头为顶点,以被测目标的物象可通过镜头的最大范围的两条边缘构成的夹角,称为视场角(fov)。视场角的大小决定了光学仪器的视野范围,视场角越大,视野就越大。通俗地说,目标物体超过这个视场角就不会被收在镜头里。
3.以红外热电堆温度传感器为例,传感器检测到的信号是视场角度范围内温度的加权平均,其fov视场角度定义为传感器收到大于50%的幅度信号的角度范围;在后续应用中,为保证测试结果的准确性,其传感器的fov视场范围需全部包含目标物体。另外,传感器的fov视场角对传感器的测试距离也有一定影响;在目标物体表面积固定的情况下,fov视场角越大,测试距离越近;fov视场角越小,测试距离相对较远。可以看出,fov视场角直接影响后续方案设计。
4.现有的测试装置如图1所示,以黑体作为辐射源,将被测传感器位置固定,传感器高度与黑体辐射面中心高度一致,传感器窗口正对前方;传感器与黑体之间的距离为r;手动将黑体在以传感器为圆心,r为半径的圆弧上移动;移动过程中,保证黑体辐射面始终正对传感器,每次移动保证黑体与传感器水平夹角始终增加10
°
,直至黑体完成半圆弧的移动;每移动一次黑体,使用数字万用表记录传感器的输出电压;等待测试完毕后,以传感器与黑体之间的水平夹角为横坐标,以传感器的输出电压为纵坐标,可得到一条类似正态分布曲线的曲线。将曲线上的最高点作为传感器满幅度信号值,计算出50%满幅度信号值时对应的横坐标,两个横坐标对应的角度之和即为fov 视场角。
5.以上测试装置存在如下弊端:动移动黑体过程中不能精确控制黑体辐射面正对角度;不能保证每次移动时黑体与传感器之间的夹角增加10
°
;测试误差较大。
技术实现要素:
6.为了解决上述问题,本实用新型提供一种fov测试装置,其实现了自动化,消除了传统手工测试产生的误差。
7.本实用新型所采用的技术方案是:
8.一种fov测试装置,包括半球形穹顶、支撑组件、光源组件、驱动组件、信号处理组件、用于固定待测传感器的传感器插座以及控制器;
9.所述支撑组件固定在半球形穹顶外周使其可水平放置,所述光源组件分布在半球形穹顶外侧,所述驱动组件使设置在半球形穹顶内的传感器插座转动,所述控制器接收待测传感器的信号并将所述信号通过信号处理组件处理后进行显示。
10.优选地,该测试装置进一步包括传动组件,所述传动组件位于驱动组件和传感器插座之间用于使得传感器插座每次转动10
°
。
11.优选地,所述半球形穹顶的最大圆弧上等距开设有十九个通孔,所述通孔用于放
置光源组件。
12.优选地,相邻所述通孔与半球形穹顶的球心连接后形成扇形,所述扇形的圆心角为10
°
。
13.优选地,当所述待测传感器为可见光传感器时,所述光源组件包括十九个led灯;当所述待测传感器为近红外传感器时,所述光源组件包括十九个红外灯泡;当所述待测传感器为红外传感器时,所述光源组件包括十九个 mems光源;当所述待测传感器为紫外线感应传感器时,所述光源组件包括十九个紫外线光源。
14.优选地,所述光源组件还包括光源驱动单元,所述光源驱动单元为led 灯、红外灯泡、mems光源或紫外线光源提供驱动信号,使其按照预设设置的模式进行打开以及关闭。
15.优选地,所述支撑组件包括方形的支架和底板,所述支架中部开设与半球形穹顶匹配的圆孔,所述底板中部开设置物通孔;
16.所述底板包括圆形层和方形层,所述圆形层与半球形穹顶的内径相同用于将其封闭,所述方形层紧贴圆形层设置,所述方形层与支架配合用于为半球形穹顶提供支撑力。
17.优选地,所述置物通孔内放置有轴承,所述传感器插座置于轴承中用于减小摩擦。
18.优选地,所述传动组件包括主动轮和从动轮,所述主动轮套设在驱动组件的输出轴上,且与从动轮啮合,所述从动轮与传感器插座连接。
19.优选地,所述驱动组件包括步进电机和步进电机驱动单元,所述步进电机驱动单元为步进电机提供脉冲驱动信号。
20.优选地,所述半球形穹顶的中部设置有一条缝隙,所述光源组件可在缝隙中移动。
21.优选地,所述光源组件包括一个led灯、红外灯泡、mems光源或紫外线光源,所述光源组件还包括用于固定led灯、红外灯泡、mems光源或紫外线光源的固定环;所述固定环包括光滑的第一半环和外圈设置有齿轮的第二半环,所述第一半环和第二半环相对设置形成固定环,且所述第一半环覆盖所述缝隙。
22.优选地,所述传动组件包括主轴齿轮和齿条,所述主轴齿轮套设在驱动组件的输出轴上,且与齿条的一端啮合,所述齿条的另一端与第二半环啮合。
23.与现有技术相比,本实用新型使用时,将光源组件定在半球形穹顶上,之后光源组件工作,同时信号处理组件采集并记录待测传感器输出的信号,当光源组件工作结束后,信号处理组件根据记录的数据对应出记录待测传感器在当前角度下的fov视场角;之后驱动组件带动传感器插座进行旋转10
°
之后,重复上述步骤直至传感器插座转动180
°
,即完成待测传感器各角度下的fov视场角的测试;
24.本实用新型通过上述方式自动完成测试,提高了效率,并且消除了因为人工操作而产生的误差。
附图说明
25.图1是背景技术中所涉及现有技术的结构示意图;
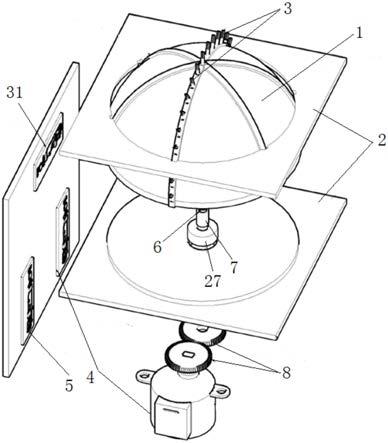
26.图2是本实用新型实施例提供的一种fov测试装置的分解图;
27.图3是本实用新型实施例提供的一种fov测试装置的结构示意图;
28.图4a是本实用新型实施例提供的一种fov测试装置中半球形穹顶的结构示意图;
29.图4b是本实用新型实施例提供的一种fov测试装置中,相邻通孔与半球形穹顶的
球心连接后所形成的扇形的结构示意图;
30.图5a是本实用新型实施例提供的一种fov测试装置中,红外灯泡的结构示意图;
31.图5b是本实用新型实施例提供的一种fov测试装置中,mems光源的结构示意图;
32.图6是本实用新型实施例提供的一种fov测试装置中支架的结构示意图;
33.图7是本实用新型实施例提供的一种fov测试装置中底板的结构示意图;
34.图8是本实用新型实施例提供的一种fov测试装置中传感器插座的结构示意图;
35.图9是本实用新型实施例提供的一种fov测试装置中步进电机与主动轮的配合图;
36.图10a是本实用新型实施例提供的一种fov测试装置中当光源组件仅包括一颗光源时,传动组件的结构示意图;
37.图10b是本发明实施例1提供的一种fov测试装置中光源组件仅包括一颗光源时,固定环和半球形穹顶的装配图;
38.图11是本实用新型实施例提供的一种fov测试装置中,光源与传感器水平夹角和传感器输出信号的曲线图;
39.图12是本实用新型实施例提供的一种fov测试装置中上位机软件功能图。
40.其中:1.半球形穹顶,2.支撑组件,3.光源组件,4.驱动组件,5.信号处理组件,6.待测传感器,7.传感器插座,8.传动组件,11.通孔,21.支架, 22.底板,23.圆孔,24.圆形层,25.方形层,26.置物通孔,27.轴承,31. 光源驱动单元,41.步进电机,42.步进电机驱动单元,81.主动轮,82.从动轮,301.固定环,302.第一半环,303.第二半环,801.主轴齿轮,802.齿条。
具体实施方式
41.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
42.在本实用新型的描述中,需要明确的是,术语“垂直”、“横向”、“纵向”、“前”、“后”、“左”、“右”、“上”、“下”、“水平”等指示方位或位置关系为基于附图所示的方位或位置关系,仅仅是为了便于描述本实用新型,而不是意味着所指的装置或元件必须具有特有的方位或位置,因此不能理解为对本实用新型的限制。
43.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
44.本实用新型实施例提供一种fov测试装置,如图2和图3所示,包括半球形穹顶1、支撑组件2、光源组件3、驱动组件4、信号处理组件5、用于固定待测传感器6的插座7以及控制器;
45.所述支撑组件2固定在半球形穹顶1外周使其可水平放置,所述光源组件3分布在半球形穹顶1外侧,所述驱动组件5使设置在半球形穹顶1内的传感器插座7转动,所述控制器接收待测传感器6的信号并将所述信号通过信号处理组件5处理后进行显示;
46.这样,采用上述结构,将光源组件3定在半球形穹顶1上,之后光源组件3工作,同时信号处理组件5采集并记录待测传感器6输出的信号,当光源组件3工作结束后,信号处理组件5根据记录的数据对应出记录待测传感器6在当前角度下的fov视场角;之后驱动组件4带动传感器插座7进行旋转10
°
之后,重复上述步骤直至传感器插座转动180
°
,即完成待测传感器 6各角度下的fov视场角的测试;
47.本实施例通过上述方式自动完成测试,提高了效率,并且消除了因为人工操作而产生的误差
48.该测试装置进一步包括传动组件8,所述传动组件8位于驱动组件4和传感器插座7之间用于使得传感器插座7每次转动10
°
。
49.在具体实施例中:
50.如图4a所示,所述半球形穹顶1的最大圆弧上等距开设有十九个通孔 11,所述通孔11用于放置光源组件3。
51.如图4b所示,相邻所述通孔11与半球形穹顶1的球心连接后形成扇形,所述扇形的圆心角为10
°
。
52.更具体地,所述半球形穹顶1由树脂和高性能尼龙3d打印而成,且其内部涂有黑体漆,目的是防止光源组件1发出的光线发生反射而影响测试结果。
53.当所述待测传感器6为可见光传感器时,所述光源组件1包括十九个led 灯;当所述待测传感器6为近红外传感器时,所述光源组件1包括十九个红外灯泡(如图5a所示);当所述待测传感器6为红外传感器时,所述光源组件1包括十九个mems光源(如图5b);当所述待测传感器6为紫外线感应传感器时,所述光源组件1包括十九个紫外线光源(包括紫外线led和疝气灯等);
54.这样,可针对不同类别的待测传感器6选择不同的光源组件1,使得该装置具有较高的适用性。
55.所述光源组件3还包括光源驱动单元31;
56.这样,通过所述光源驱动单元31为led灯、红外灯泡、mems光源或紫外线光源提供驱动信号,使其按照预设设置的模式进行打开以及关闭。
57.在具体实施例中:
58.如图6和图7所示,所述支撑组件2包括方形的支架21和底板22,所述支架21中部开设与半球形穹顶1匹配的圆孔23,所述底板22中部开设有置物通孔26;
59.所述底板22包括圆形层24和方形层25,所述圆形层24与半球形穹顶 1的内径相同用于将其封闭,所述方形层25紧贴圆形层24设置,所述方形层25与支架22配合用于为半球形穹顶1提供支撑力;
60.更具体地,所述支架21是由亚力克材料制成的厚度约5mm厚的中心中空的方形结构,中间部分留有圆孔23,为半球形穹顶1提供支撑作用,保证所述装置可水平放置;
61.所述底板22由亚克力材料制成,可分为两层结构;一层是厚度约为5mm 的直径与半球穹顶内径相同的圆形层24;一层是厚度约为5mm的方形层25。两层结构中心位置留有置物通孔26,用于放置其它结构件;
62.圆形层24可封闭半球形穹顶1,防止外部干扰影响测试结果;方形层25可与支架21架配合支撑所述半球形穹顶1。
63.另外,所述置物通孔26内放置有轴承27,所述传感器插座7置于轴承 27中用于减小摩擦;
64.更具体地,所述轴承27外径约为26mm,内径约为10mm,厚度约为8mm;放置于底板22中心的置物通孔26处,内径与传感器插座7固定,目的是为减小传感器插座7与底板22的摩擦力。
65.另外,如图8所示,传感器插座7由特氟龙材料3d打印而成,整体为圆柱形结构;中心留有8个直径约为0.8mm的通孔贯穿整个圆柱形结构,可满足对to39封装和to46封装光学传感器的测试。小孔内部放置铜针,用于传输传感器输出信号。
66.所述传动组件8包括主动轮81和从动轮82,所述主动轮81套设在驱动组件4的输出轴上,且与从动轮82啮合,所述从动轮82与传感器插座7连接;
67.这样,驱动组件4工作,其带动主动轮81转动,主动轮81带动从动轮 82转动,而从动轮82与传感器插座7连接,进而使得传感器插座7转动。
68.所述驱动组件4包括步进电机41和步进电机驱动单元42;
69.这样,通过所述步进电机驱动单元42为步进电机41提供脉冲驱动信号;
70.在这里需要强调一点,没有脉冲时,步进电机41静止,若加入适当的脉冲信号,步进电机41的主轴就会以一定角度转动;其转动速度和脉冲频率成正比;
71.本实施例采用28byj
‑
48单极性减速步进电机,减速比为1:64,步进角为5.625/64度,如果步进电机主轴需要转动1圈,就要需要4096个脉冲信号;
72.另外,若使用步进电机41直接连接驱动传感器插座7转动,根据设计每次步进需要转动10度,计算出脉冲数为113.77778,此数不是整数,故无法实现;因此需要使用齿轮传动,通过传动比设计,使得步进电机41主轴转动360
°
带动传感器插座转动10
°
。
73.在另外一个实施例中,光源组件3仅包括一颗光源,其对应的半球形穹顶1和传动组件8均有不同的结构,如图10a和10b所示,具体为:
74.所述半球形穹顶1的中部设置有一条缝隙101,所述光源组件3可在缝隙101中移动;
75.所述光源组件3包括一个led灯、红外灯泡、mems光源或紫外线光源,所述光源组件3还包括用于固定led灯、红外灯泡、mems光源或紫外线光源的固定环301;所述固定环301包括光滑的第一半环302和外圈设置有齿轮的第二半环303,所述第一半环302和第二半环303相对设置形成固定环301,且所述第一半环302覆盖所述缝隙;
76.所述传动组件8包括主轴齿轮801和齿条802,所述主轴齿轮801套设在驱动组件4的输出轴上,且与齿条802的一端啮合,所述齿条802的另一端与第二半环303啮合;
77.这样,采用上述传动组件8,步进电机41工作时,其带动主轴齿轮801 转动,主轴齿轮801使齿条802往一个方向移动,齿条802移动,固定环301 跟着移动,这样就使得固定在固定环301上的光源在半球形穹顶1中部的缝隙中移动,从而改变光源和待测传感器之间的角度。
78.在此种结构的光源组件3中,光源只有一个,可以避免因为光源之前的微小差异,造成传感器响应光源产生信号的偏差;
79.并且,通过这种方式可产生连续的角度变化,从而使得待测传感器的fov 可以分辨的更细。
80.另外,在实施例1中,所述步进电机驱动单元42、光源驱动单元31、信号处理组件5以及控制器均集成在pcb板上,且步进电机驱动单元42、光源驱动单元31以及信号处理组件5均与控制器连接,控制器控制步进电机驱动单元42、光源驱动单元31和信号处理组件5的工作状态。
81.另外,信号处理组件1包括有信号采集单元、信号放大单元,其采集待测传感器的数据后,经放大,转化和算法处理后,通过usb、串口或者以太网把数据上传至上位机,上位机接收到数据后,通过图表界面或者绘图界面,直观显示;
82.上述算法即为传感器fov视场角度计算算法。例:当待测传感器转动停止于某一角度时,光源依次亮灭(应用于光电传感器,红外热堆传感器,紫外线传感器等),或者按照一定的调制方式亮灭(应用于热释电传感器等),被待测传感器将接收到的光信号转换为电信号并传输至信号处理组件;信号处理组件通过计算比较被测传感器输出信号大小,若将每次光源工作时被测传感器的输出值为纵坐标,以光源与被测传感器之间的夹角为横坐标,则可以得到类似正态分布形状的曲线(如图11所示);选取最高点作为待测传感器为信号输出的最大值,以待测传感器输出最大值的50%幅度信号值为截取点,此时两个截取点的横坐标对应的夹角之和,即为被测传感器的fov视场角度。
83.另外,上位机软件功能图如图12所示,包括源数据区、图像区和结果区;源数据区记录传感器在光源工作时的输出数据,每个方向上会记录19 个数据,共19个方向。图像区是以传感器与光源之间的水平夹角为横坐标,以传感器在光源工作时的输出信号为纵坐标的类似正态分布曲线的曲线,传感器在每个方向上会记录成一条曲线,共19个方向。结果区是将传感器输出的源数据经过算法处理后得到的fov视场角结果。
84.采用本实施例提供的装置进行fov测试的方法具体按照如下步骤实施:
85.s1,光源组件3工作,同时信号处理组件5采集并记录待测传感器6输出的信号;
86.s2,当所述光源组件3工作结束后,信号处理组件5根据记录的数据对应出记录待测传感器6在当前角度下的fov视场角;
87.s3,驱动组件4带动传感器插座7进行旋转10
°
之后,重复s1和s2 直至传感器插座7转动180
°
,即完成待测传感器6各角度下的fov视场角的测试。
88.在具体实施例中,所述s1中光源组件3工作,具体为:
89.第一个光源工作1s后熄灭,紧接着第二个光源工作1s后熄灭,直到第 19颗光源全部工作完成。
90.本实施例步进电机驱动单元42输出脉冲信号控制步进电机41主轴转动一定角度,步进电机41主轴带动主动轮81转动,主动轮81带动从动轮82 转动,从动轮82带动插有待测传感器6的传感器插座7转动;经过传动比设计,保证传感器插座每次转动10
°
;
91.当待测传感器6转动完毕后,光源驱动单元31控制光源依次开始工作,即第一颗光源工作1s后熄灭,紧接着第二颗光源工作1s后熄灭,直到第19 颗光源全部工作完成;信号处理组件5会每次在光源工作时采集并记录待测传感器输出信号,经过算法处理后即可得到被测传感器在当前角度下的fov 视场角度;当待测传感器在此角度下测试完毕后,传感器插座7会转动10
°
继续进行下一个角度下的fov视场角度测试,依次类推,直至传感器插座7 带动被测传感器转动180
°
后即完成待测传感器6各角度下的fov视场角度测试;测试完毕后,将数据传输至上位机直观显示。
92.本实施例具有如下优点:
93.使用步进电机控制传感器转动角度,能精确测试传感器在不同方向上的 fov视场角;测试装置体积小,占用空间小;可搭配不同光源,如led光源、红外灯泡光源、mems光源,紫外线光源等,可针对不同光学类传感器进行测试。支持传感器主要有光电传感器,紫外线感应传感器,近红外传感器,中远红外传感器;集成信号处理组件,可与上位机软件配合,将测试结果直观显示;可以由控制器控制,自动完成测试,提高了效率,并且消除了因为人工操作而产生的误差。
94.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1