一种空气氟化物采样器采集机构的制作方法
1.本实用新型涉及氟化物采样器技术领域,具体的,涉及一种空气氟化物采样器采集机构。
背景技术:
2.大气采样器是一种用以采集大气环境及车间现场气体的常用仪器,它广泛适用于大气环境监测、卫生防疫、劳动保护、科研等单位使用,也可与有关仪器配套使用,通过对采样气体分析,以了解环境被有害气体污染的程度,并向有关主管部门提供污染的实际情况,以采取对策,从而保障人们有个健康的生活环境,空气中具有大量的氟化物,对氟化物进行采集时,便需用到氟化物采样器。
3.但是,传统的空气氟化物采样器的吸气头都是固定的,不能进行多角度转动,当需要对不同方位的空气进行采集时,需要工人转动整体装置,这样不仅消耗大量的时间,还增大了工人的劳动量。
4.因此,本实用新型提供了一种空气氟化物采样器采集机构,以解决上述背景技术中提出的问题。
技术实现要素:
5.本实用新型提出一种空气氟化物采样器采集机构,解决了相关技术中的一种空气氟化物采样器采集机构问题。
6.本实用新型的技术方案如下:一种空气氟化物采样器采集机构,包括底板,所述底板的上端固定连接有固定筒,所述固定筒的内部滑动连接有螺纹杆,所述螺纹杆的圆周面螺纹连接有升降装置,所述螺纹杆的上端固定连接有采集装置,所述采集装置的上端固定连接有电动伸缩杆,所述电动伸缩杆的上端固定连接有角度调节装置。
7.作为本实用新型进一步的方案:所述底板的下端固定连接有万向轮,所述万向轮设置有多个均匀的分布在底板的下端,工作时,在万向轮的作用下,使得整体装置可以随意的移动到合适的位置。
8.作为本实用新型再进一步的方案:所述升降装置包括蜗杆,蜗轮、轴承座和手柄,所述底板的上端固定连接有轴承座,所述轴承座的内部转动连接有蜗杆,所述蜗杆的左端固定连接有手柄;所述螺纹杆的圆周面螺纹连接有蜗轮,所述蜗轮与固定筒之间转动连接,所述蜗轮与蜗杆啮合,工作时,转动手柄,在手柄的作用下带动蜗杆转动,蜗杆转动带动蜗轮转动,蜗轮转动带动螺纹杆沿着固定筒进行移动,在螺纹杆的作用下使得采集装置发生移动,采集装置移动使得角度调节装置发生移动,这样就达到了对角度调节装置的高度进行调节的目的。
9.作为本实用新型再进一步的方案:所述固定筒的内部开设有限位槽,所述限位槽的内部滑动连接有限位块,所述限位块与螺纹杆之间固定连接,所述限位块和限位槽一一对应,对称分布在螺纹杆的左右两端,工作时,在限位块和限位槽的作用下使得螺纹杆稳定
的进行移动。
10.作为本实用新型再进一步的方案:所述蜗轮与螺纹杆之间的螺纹形状为三角形,工作时,由于三角螺纹具有自锁性,使得蜗轮在不发生转动时,螺纹杆可以稳定的固定在蜗轮的内部而不发生移动。
11.作为本实用新型再进一步的方案:所述角度调节装置包括第一固定座、转动杆、吸气头、移动架、滑杆、滑块、转动块、第二固定座和滑动槽,所述采集装置的上端固定连接有第一固定座,所述第一固定座的内部转动连接有转动杆,所述转动杆的左端固定连接有吸气头,所述转动杆的右端面开设有滑动槽,所述滑动槽的内部固定连接有滑杆,所述滑杆的圆周面滑动连接有滑块;所述电动伸缩杆的上端固定连接有移动架,所述移动架的左端固定连接有第二固定座,所述第二固定座的内部转动连接有转动块,所述转动块与滑块之间固定连接,工作时,开启电动伸缩杆,在电动伸缩杆的作用下使得移动架发生移动,移动架移动带动第二固定座和转动块移动,转动块移动的同时并在第二固定座内部转动,同时转动块移动带动滑块沿着滑杆在滑动槽内部移动,随着滑块的移动使得转动杆围绕着第一固定座发生转动,这时在转动杆的作用下使得吸气头发生转动,这样就能达到了调节吸气头角度的目的。
12.作为本实用新型再进一步的方案:所述吸气头与采集装置之间通过连接管固定连接,工作时,吸气头采集到的气体可以顺着连接管进入采集装置的内部。
13.作为本实用新型再进一步的方案:所述第一固定座、转动杆、吸气头、移动架、滑杆、滑块、转动块、第二固定座和滑动槽设置有多个均匀的分布在采集装置的上端,工作时,对称分布的第一固定座、转动杆、吸气头、移动架、滑杆、滑块、转动块、第二固定座和滑动槽,使得吸气头可以多个方向多角度进行采集气体。
14.本实用新型的工作原理及有益效果为:
15.本实用新型中,通过电动伸缩杆、第一固定座、转动杆、吸气头、移动架、滑杆、滑块、转动块、第二固定座和滑动槽的配合下,开启电动伸缩杆,在电动伸缩杆的作用下使得移动架发生移动,移动架移动带动第二固定座和转动块移动,转动块移动的同时并在第二固定座内部转动,同时转动块移动带动滑块沿着滑杆在滑动槽内部移动,随着滑块的移动使得转动杆围绕着第一固定座发生转动,这时在转动杆的作用下使得吸气头发生转动,解决了传统的采集机构的吸气头都是固定的问题,达到了便于调节吸气头角度的目的。
附图说明
16.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
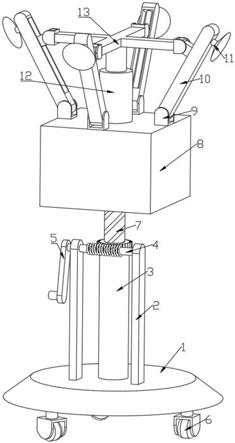
17.图1为本实用新型主视的整体结构示意图;
18.图2为本实用新型主视剖面的整体结构示意图;
19.图3为本实用新型图2中a的放大结构示意图;
20.图4为本实用新型图2中b的放大结构示意图;
21.图5为本实用新型俯视的整体结构示意图。
22.图中:1、底板;2、轴承座;3、固定筒;4、蜗杆;5、手柄;6、万向轮;7、螺纹杆;8、采集装置;9、第一固定座;10、转动杆;11、吸气头;12、电动伸缩杆;13、移动架;14、蜗轮;15、滑杆;16、限位块;17、限位槽;18、滑块;19、转动块;20、第二固定座;21、滑动槽。
具体实施方式
23.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本实用新型保护的范围。
24.实施例1
25.如图1~图5所示,本实施例提出了一种空气氟化物采样器采集机构,包括底板1,底板1的上端固定连接有固定筒3,固定筒3的内部滑动连接有螺纹杆7,螺纹杆7的圆周面螺纹连接有升降装置,螺纹杆7的上端固定连接有采集装置8,采集装置8的上端固定连接有电动伸缩杆12,电动伸缩杆12的上端固定连接有角度调节装置。
26.本实施例中,作为本实用新型进一步的实施方案:底板1的下端固定连接有万向轮6,万向轮6设置有多个均匀的分布在底板1的下端,工作时,在万向轮6的作用下,使得整体装置可以随意的移动到合适的位置。
27.作为本实用新型再进一步的实施方案:升降装置包括蜗杆4,蜗轮14、轴承座2和手柄5,底板1的上端固定连接有轴承座2,轴承座2的内部转动连接有蜗杆4,蜗杆4的左端固定连接有手柄5;螺纹杆7的圆周面螺纹连接有蜗轮14,蜗轮14与固定筒3之间转动连接,蜗轮14与蜗杆4啮合,工作时,转动手柄5,在手柄5的作用下带动蜗杆4转动,蜗杆4转动带动蜗轮14转动,蜗轮14转动带动螺纹杆7沿着固定筒3进行移动,在螺纹杆7的作用下使得采集装置8发生移动,采集装置8移动使得角度调节装置发生移动,这样就达到了对角度调节装置的高度进行调节的目的。
28.作为本实用新型再进一步的实施方案:固定筒3的内部开设有限位槽17,限位槽17的内部滑动连接有限位块16,限位块16与螺纹杆7之间固定连接,限位块16和限位槽17一一对应,对称分布在螺纹杆7的左右两端,工作时,在限位块16和限位槽17的作用下使得螺纹杆7稳定的进行移动。
29.作为本实用新型再进一步的实施方案:蜗轮14与螺纹杆7之间的螺纹形状为三角形,工作时,由于三角螺纹具有自锁性,使得蜗轮14在不发生转动时,螺纹杆7可以稳定的固定在蜗轮14的内部而不发生移动。
30.作为本实用新型再进一步的实施方案:角度调节装置包括第一固定座9、转动杆10、吸气头11、移动架13、滑杆15、滑块18、转动块19、第二固定座20和滑动槽21,采集装置8的上端固定连接有第一固定座9,第一固定座9的内部转动连接有转动杆10,转动杆10的左端固定连接有吸气头11,转动杆10的右端面开设有滑动槽21,滑动槽21的内部固定连接有滑杆15,滑杆15的圆周面滑动连接有滑块18;电动伸缩杆12的上端固定连接有移动架13,移动架13的左端固定连接有第二固定座20,第二固定座20的内部转动连接有转动块19,转动块19与滑块18之间固定连接,工作时,开启电动伸缩杆12,在电动伸缩杆12的作用下使得移动架13发生移动,移动架13移动带动第二固定座20和转动块19移动,转动块19移动的同时并在第二固定座20内部转动,同时转动块19移动带动滑块18沿着滑杆15在滑动槽21内部移动,随着滑块18的移动使得转动杆10围绕着第一固定座9发生转动,这时在转动杆10的作用下使得吸气头11发生转动,这样就能达到了调节吸气头11角度的目的。
31.作为本实用新型再进一步的实施方案:吸气头11与采集装置8之间通过连接管固
定连接,工作时,吸气头11采集到的气体可以顺着连接管进入采集装置8的内部。
32.作为本实用新型再进一步的实施方案:第一固定座9、转动杆10、吸气头11、移动架13、滑杆15、滑块18、转动块19、第二固定座20和滑动槽21设置有多个均匀的分布在采集装置8的上端,工作时,对称分布的第一固定座9、转动杆10、吸气头11、移动架13、滑杆15、滑块18、转动块19、第二固定座20和滑动槽21,使得吸气头11可以多个方向多角度进行采集气体。
33.本实用新型的工作原理是:
34.使用本实用新型时,推动整体装置在万向轮6的作用下移动到合适的位置,在利用采集装置8和吸气头11对空气氟化物进行采集,当需要对吸气头11的角度进行调节时,开启电动伸缩杆12,在电动伸缩杆12的作用下使得移动架13发生移动,移动架13移动带动第二固定座20和转动块19移动,转动块19移动的同时并在第二固定座20内部转动,同时转动块19移动带动滑块18沿着滑杆15在滑动槽21内部移动,随着滑块18的移动使得转动杆10围绕着第一固定座9发生转动,这时在转动杆10的作用下使得吸气头11发生转动,这样就能达到了调节吸气头11角度的目的了,当需要对吸气头11和采集装置8的高度进行调节时,转动手柄5,在手柄5的作用下带动蜗杆4转动,蜗杆4转动带动蜗轮14转动,蜗轮14转动带动螺纹杆7沿着固定筒3进行移动,在螺纹杆7的作用下使得采集装置8发生移动,在采集装置8的作用下使得吸气头11发生移动,这样就达到了调节吸气头11和采集装置8高度的目的了。
35.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1