应力释放MEMS陀螺仪的制作方法
应力释放mems陀螺仪
1.相关申请的交叉引用
2.本技术根据35u.s.c.
§
119(e)要求2020年6月8日提交的、代理人案卷no.g0766.70318us00、发明名称为“驱动和传感应力释放装置”的美国临时专利申请序列no.63/036,273的权益,其全部内容通过引用并入本文。
3.本技术根据35u.s.c.
§
119(e)要求2020年8月24日提交的、代理人案卷no.g0766.70328us00、发明名称为“应力释放mems陀螺仪”的美国临时专利申请序列no.63/069,656的权益,其全部内容通过引用并入本文。
技术领域
4.本技术涉及用于微机电系统(mems)惯性传感器的运动学连杆。
背景技术:
5.mems装置可以包括通过一个或多个耦合器耦合在一起的多个移动质量块。例如,陀螺仪(有时简称为“gyros”)是对旋转敏感的设备,因此可用于检测旋转。微机电系统(mems)陀螺仪通常包括可移动体,有时称为“检测质量块”,向其施加电信号以产生主要沿特定轴的运动。这被称为驱动检测质量块,并且检测质量块被驱动所沿的轴有时被称为传动轴。当陀螺仪经历旋转时,检测质量块另外沿着不同于驱动轴的轴移动,有时称为感测轴。检测检测质量块沿感测轴的运动,提供陀螺仪所经历的旋转的指示。对于一些mems陀螺仪,驱动检测质量可以包括使检测质量在平面内运动。对于某些mems陀螺仪,可以通过感测验证质量的平面外运动来检测旋转。
技术实现要素:
6.根据一些方面,提供一种mems装置,包括:基底;检测质量块,耦合到所述基底并且被配置为沿着谐振器轴移动;驱动结构,包括至少一个电极,并且被配置为驱动所述检测质量块沿着所述谐振器轴线移动;和枢转连杆,在所述枢转连杆的第一端和第二端处耦合到所述检测质量块,所述第一端包括第一固定枢轴并且所述第二端包括第二固定枢轴,所述枢转连杆包括:第一杆,被配置为围绕所述第一固定枢轴和第一动态枢轴枢转;第二杆,被配置为围绕所述第二固定枢轴和第二动态枢轴枢转;和第三杆,被配置为围绕所述第一动态枢轴和所述第二动态枢轴枢转,其中所述检测质量块被配置为当所述枢转连杆枢转时沿着所述谐振器轴移动。
7.根据一些方面,提供一种mems装置,包括:基底;检测质量块,耦合到所述基底并且被配置为响应于所述mems装置的旋转而沿着第一轴移动;感测结构,包括至少一个电极并且被配置为沿着所述第一轴移动;和枢转连杆,在所述枢转连杆的第一端和第二端处将所述感测结构耦合到所述检测质量块,所述第一端包括第一固定枢轴并且所述第二端包括第二固定枢轴,所述枢转连杆包括:第一杆,被配置为围绕所述第一固定枢轴和第一动态枢轴枢转;第二杆,被配置为围绕所述第二固定枢轴和第二动态枢轴枢转;和第三杆,被配置为
围绕所述第一动态枢轴和所述第二动态枢轴枢转,其中所述枢转连杆被配置为当所述检测质量块沿着所述第一轴移动时枢转。
8.根据一些方面,提供一种mems装置,包括:检测质量块,被配置为沿着第一轴移动;驱动结构,包括至少一个电极并且被配置为沿着所述第一轴驱动所述检测质量块;和连杆,将所述检测质量块耦合到所述至少一个驱动结构,其中所述连杆包括:第一杠杆,在所述第一杠杆的第一端处耦合到所述检测质量块;第一弹簧,在所述第一杠杆的第二端处耦合到所述第一杠杆;第二杠杆,在所述第二杠杆的第一端处耦合到所述检测质量块;第二弹簧,在所述第二杠杆的第二端处耦合到所述第二杠杆;其中所述第一和第二弹簧耦合在一起;和其中所述连杆被配置为围绕所述第一弹簧的第一和第二动态枢轴以及所述第二弹簧的第一和第二动态枢轴枢转。
附图说明
9.将参考以下附图描述本技术的各个方面和实施例。应当理解,这些数字不一定按比例绘制。出现在多个图中的项目在其出现的所有图中用相同的附图标记表示。为清晰起见,并非每个图纸中都会标记每个组件。
10.图1a-1c是根据一些非限制性实施例的具有枢转连杆的示例mems器件的示意图。
11.图2示出了根据一些非限制性实施例的图1c的示例mems装置在驱动模式下的运动。
12.图3示出了根据一些非限制性实施例的图1c的示例mems装置在感测模式下的运动。
13.图4a-4d示出了根据一些非限制性实施例的三杆枢转连杆的示例。
14.图4e示出了根据一些非限制性实施例的在正常操作模式下的图4a-4d的示例性三杆枢转连杆。
15.图4f示出了根据一些非限制性实施例的在倾斜操作模式下的图4a-4d的示例性三杆枢转连杆。
16.图5a-5d示出了根据一些非限制性实施例的四杆枢转连杆的示例。
17.图5e示出了根据一些非限制性实施例的在正常操作模式下的图5a-5d的示例性四杆枢转连杆。
18.图5f示出了根据一些非限制性实施例的在倾斜操作模式下的图5a-5d的示例性四杆枢转连杆。
19.图6示出了根据一些非限制性实施例的另一示例性四杆枢转连杆。
20.图7示出了根据一些非限制性实施例的示例性五杆枢转连杆。
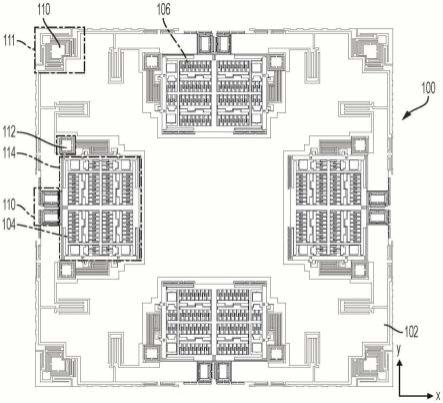
21.图8示出了根据一些非限制性实施例的具有四个检测质量块的示例mems陀螺仪。
22.图9示出了根据一些非限制性实施例的具有十二个检测质量块的示例mems陀螺仪。
23.图10是示出根据一些非限制性实施例的包括mems陀螺仪的示例系统的框图。
24.图11是示出根据一些非限制性实施例的包括具有mems陀螺仪的示例系统的汽车的透视图。
具体实施方式
25.本技术的各方面提供了具有运动学枢转连杆的微机电系统(mems)装置,其可降低正交、剪切和法向应力敏感性以及立方刚度。根据一些方面,枢转连杆包括多于两个杆,例如三个杆、四个杆或五个杆。枢转连杆的每个杆可以被配置为在杆的相应端部枢转。
26.mems陀螺仪可以包括至少一个检测质量块,该检测质量块被配置为通过科里奥利力的检测促进角速率的检测。科里奥利效应,以及科里奥利力,在以下情况下产生:(1)检测质量块振荡;以及(2)陀螺仪受到角运动。检测质量块可以悬挂在下面的基底上。在驱动模式中,检测质量块被配置为沿着第一轴移位。驱动模式下的检测质量块的位移可通过与检测质量块耦合的一个或多个驱动结构来实现。当检测质量块绕第二轴进行角运动时,会产生科里奥利力,从而导致检测质量块沿第三轴位移。耦合到检测质量块的感测结构可以感测检测质量块沿着第三轴的位移,以测量mems陀螺仪的旋转。
27.通过一个或多个梭子可以促进检测质量块与一个或多个驱动和感测结构的耦合。具体地,所述一个或多个驱动和感测结构可以各自耦合到枢转连杆,并且所述枢转连杆可以通过梭子耦合到检测质量块。然而,在一些实施例中,mems陀螺仪可以不包括一个或多个梭子,并且枢转连杆可以直接耦合到检测质量块。梭子可以通过抵抗与期望运动正交的运动来抑制驱动和/或感测模式的失准。
28.枢转连杆有助于驱动和感测结构与检测质量块之间的运动传递,以使检测质量块能够在驱动模式下位移,以及在感测模式中检测由科里奥利力引起的位移。枢转连杆可包括通过连接器连接在一起的两个段,在本文中可称为杠杆。杠杆还可以用作检测质量块和下面的基底之间的中间结构,并且可以是柔性的和/或可弯曲的,以便于检测质量块和驱动和/或感测结构之间的运动传递。
29.本文所述类型的陀螺仪容易受到某些误差源的影响,这些误差源随着时间的推移可导致错误检测旋转并损坏mems陀螺仪。例如,mems陀螺仪容易受到正交、剪切和法向应力以及立方刚度引起的误差的影响。正交是检测质量块在与驱动运动正交的方向上的运动,理想情况下为900与科里奥利响应异相。正交源包括mems器件的倾斜和侧壁角度不对称。通常,正交是不希望的,因为陀螺仪可无法区分正交产生的电信号与旋转产生的电信信号,因此陀螺仪在检测旋转时的精度可受到正交的出现的负面影响。法向应力是由于垂直于构件施加的载荷(例如拉伸或压缩)而产生的,而剪切应力是因为平行于构件施加(例如倾斜)的载荷而产生的。法向应力可导致驱动模式和感测模式之间的频率分裂的变化,而剪切应力可导致陀螺仪的正交信号的变化。立方体刚度表示由于梁(例如,枢转连杆的连接件)延伸导致的弹簧硬化而产生的非线性。
30.mems陀螺仪可以通过使用包括将杠杆耦合在一起的单个连接器的枢转连杆来说明正交。枢转连杆完全减少或防止正交。例如,当梭子直线移动离开枢转连杆时,随着连接器弯曲,允许枢转连杆弯曲。连接器可以抵抗扭转和/或剪切,从而抑制枢转连杆的倾斜,并通过抑制梭子和与其连接的检测质量块的不希望的旋转或倾斜来防止陀螺仪的正交运动,同时允许期望的线性运动。
31.然而,发明人已经认识到,仅具有两个杆的枢转连杆可容易受到其他误差源的影响,包括本文所述的剪切和法向应力敏感性以及立方体刚度。发明人已经认识到,通过实现具有两个以上杆的运动学枢转连杆,可以在mems装置中减少这些误差源。例如,在一些实施
例中,枢转连杆包括三个杆、四个杆或五个杆。每个枢转连杆可以在枢转连杆的端部(例如,连接到检测质量的端部)处具有固定枢轴,并且在枢转连杆的杆之间具有多个动态枢轴。例如,三杆连杆可包括至少两个动态枢轴,四杆连杆可以包括至少三个动态枢轴,以及五杆连杆包括至少四个动态枢轴。
32.每种类型的枢转连杆(例如,三杆、四杆和五杆等)可以使用许多不同的设计来实现。枢转连杆的不同类型和设计中的每一种都可以解决一个或多个不同的误差源(例如,正交、剪切应力、法向应力、立方刚度),并且可以基于期望解决的误差源来选择所实现的枢转连杆类型和设计。
33.因此,根据本技术的一个方面,提供一种mems装置,包括:基底;检测质量块,耦合到所述基底并且被配置为沿着谐振器轴移动;驱动结构,包括至少一个电极,并且被配置为驱动所述检测质量块沿着所述谐振器轴线移动;和枢转连杆,在所述枢转连杆的第一端和第二端处耦合到所述检测质量块,所述第一端包括第一固定枢轴并且所述第二端包括第二固定枢轴,所述枢转连杆包括第一杆,被配置为围绕所述第一固定枢轴和第一动态枢轴枢转;第二杆,被配置为围绕所述第二固定枢轴和第二动态枢轴枢转;和第三杆,被配置为围绕所述第一动态枢轴和所述第二动态枢轴枢转,其中所述检测质量块被配置为当所述枢转连杆枢转时沿着所述谐振器轴移动。
34.在一些实施例中,提供了一种mems装置,包括:基底;检测质量块,耦合到所述基底并且被配置为响应于所述mems装置的旋转而沿着第一轴移动;感测结构,包括至少一个电极并且被配置为沿着所述第一轴移动;和枢转连杆,在所述枢转连杆的第一端和第二端处将所述感测结构耦合到所述检测质量块,所述第一端包括第一固定枢轴并且所述第二端包括第二固定枢轴,所述枢转连杆包括第一杆,被配置为围绕所述第一固定枢轴和第一动态枢轴枢转;第二杆,被配置为围绕所述第二固定枢轴和第二动态枢轴枢转;和第三杆,被配置为围绕所述第一动态枢轴和所述第二动态枢轴枢转;其中所述枢转连杆被配置为当所述检测质量块沿着所述第一轴移动时枢转。
35.在一些实施例中,提供了一种mems装置,包括:检测质量块,被配置为沿着第一轴移动;驱动结构,包括至少一个电极并且被配置为沿着所述第一轴驱动所述检测质量块;和连杆,将所述检测质量块耦合到所述至少一个驱动结构,其中所述连杆包括:第一杠杆,在所述第一杠杆的第一端处耦合到所述检测质量块;第一弹簧,在所述第一杠杆的第二端处耦合到所述第一杠杆;第二杠杆,在所述第二杠杆的第一端处耦合到所述检测质量块;第二弹簧,在所述第二杠杆的第二端处耦合到所述第二杠杆;其中所述第一和第二弹簧耦合在一起;和其中所述连杆被配置为围绕所述第一弹簧的第一和第二动态枢轴以及所述第二弹簧的第一和第二动态枢轴枢转。
36.下面进一步描述上述方面和实施例以及附加方面和实施方式。这些方面和/或实施例可以单独使用、一起使用或以任何组合使用,因为本技术在这方面不受限制。
37.图1a-1c是根据一些非限制性实施例的具有枢转连杆110的示例mems装置100的示意图。具体地,图1a示出了mems装置100,具有被配置为便于角速率检测的检测质量块102。检测质量块102可以悬挂在下面的基底(未示出)上方并耦合到下面的基底。如本文所述,检测质量块102可被配置为由于耦合到检测质量块102的一个或多个驱动结构104所产生的位移而振动。例如,检测质量块102可被设置为沿着第一轴(例如,x轴)和基本上垂直于第一轴
(如,y轴)的第二轴移动。在一些实施例中,检测质量块102可以被配置为在平面内和/或平面外移动。
38.mems装置100还包括驱动结构104和感测结构106。驱动结构是被配置为引起mems装置100的检测质量块的运动的结构。驱动结构104可以包括驱动电容器,其中静电力被用于引起检测质量块102的运动。例如,驱动结构104可以包括第一多个电极,与耦合到下面的基底的第二多个电极间隔一定距离。可以向第二多个电极施加电压,使得第一和第二多个电极之间的距离改变。因此,由于第一和第二多个电极之间的距离的变化,驱动结构可以响应于施加到第二多个电极的电压而振荡。驱动结构104的运动可以传递到检测质量块102,如本文进一步描述的。
39.感测结构是被配置为检测mems装置100的检测质量块的运动的结构。例如,感测结构106可以感测检测质量块102的运动,该运动是由当检测质量块102经历角运动时产生的科里奥利力引起的。由科里奥利力引起的检测质量块102的运动可以被传递到感测结构106,从而使感测结构如本文进一步描述的那样振荡。感测结构106可以包括感测电容器,其中当耦合到感测结构的电极和耦合到下层基底的电极之间的距离改变时,产生静电力。检测质量块的科里奥利平移运动可以基于由于角旋转而产生的静电科里奥利力来确定。
40.在所示实施例中,检测质量块102包括两个驱动结构和两个感测结构。然而,任何合适数量的驱动结构和感测结构都可以被实现并耦合到检测质量块102。
41.可以提供一个或多个锚112用于将mems装置100的组件耦合到下面的基底(未示出)。例如,在图1a所示的实施例中,提供锚112用于将驱动和感测结构104、106耦合到下面的基底。
42.在驱动模式中,驱动结构104的运动可通过一个或多个可移动梭108传递到检测质量块102。类似地,在感测模式中,检测质量块102的运动可经由一个或多个梭108传递至感测结构106,如图1a所示。枢转连杆110包括通过连接器耦合在一起的两个段,该枢转连杆以铰链方式耦合到每个梭108,以便于驱动和感测结构104、106与检测质量块102之间的运动传递。特别地,可移动梭108可设置在枢转连杆110和检测质量块102间。
43.如本文所述,枢转连杆110可被配置为具有至少三个杆。也就是说,枢转连杆可以具有至少三个部分,所述至少三个部件被配置为围绕每个杆的第一和第二端处的枢轴枢转。因此,具有三个杆的枢转连杆包括四个枢轴:位于连杆的第一和第二端的第一固定枢轴和第二固定枢轴,以及位于连杆的第一杆和第二杆以及第二杆和第三杆之间的第一和第三动态枢轴。在一些实施例中,连杆的每个杆可以被配置为相对于连杆的其他杆自由枢转。
44.如本文所述,枢转连杆110可耦合在检测质量块102和驱动结构104或感测结构106之间。在驱动操作模式中,可使驱动结构104振荡。驱动结构104的运动可通过枢转连杆110和/或梭108传递到检测质量块102。例如,驱动结构104运动可导致枢转连杆108的杆旋转,从而导致枢转杆110枢转。由于枢转连杆110和检测质量块102之间的耦合,枢转连杆的枢转可推动或拉动检测质量块102。因此,驱动结构104的运动可通过枢转连杆100传递到检测质量块102上。
45.类似地,枢转连杆110和/或梭108可将检测质量块102的运动传递到感测结构106。在感测操作模式中,检测质量块102可由于科里奥利力而移位,如本文进一步描述的。检测质量块102的位移可导致枢转连杆110的杆旋转,从而导致枢转连杆110枢转。由于枢转连杆
110和感测结构之间的耦合,枢转连杆120的枢转可推动或拉动感测结构106。因此,检测质量块102的运动可以经由枢转连杆传递到感测结构106。
46.mems装置100可包括多个枢转连杆110。例如,mems装置100可以包括耦合到一个或多个驱动结构104(例如,如图1a所示的两个驱动结构)中的每一个的相应的枢转连杆。在一些实施例中,mems装置100可包括耦合到一个或多个感测结构106(例如,如图1a所示的两个感测构件106)中的每一个的相应枢转连杆110。在一些实施例中,例如,如图1a所示实施例中所示,相应的枢转连杆110可以耦合到驱动结构104和感测结构106中的每一个。
47.发明人已经认识到,在mems装置的验证质量和驱动或感测结构之间实现本文所述类型的枢转连杆可以减少mems装置所经历的各种形式的应力(例如,立方刚度、法向应力敏感性、剪切应力敏感性和/或正交)。这种应力可导致mems装置感测旋转的能力不准确。因此,本文所述的枢转连杆提供了具有改进的感测能力的mems装置。
48.图1b-1c示出了具有枢转连杆110的mems装置100的附加示例。为了简单起见,图1b中的图示省略了驱动和感测结构104、106。如图1b所示,枢转连杆110经由梭108耦合到检测质量块102。提供了一个或多个用于将mems装置100的部件耦合到下面的基底的锚112。
49.图1c示出了修改了本文所述梭108的mems装置100的示例。在图1c的mems装置中,枢转连杆110耦合到驱动和感测结构104、106,而不使用图1a-1b所示的一个或多个梭,而是直接耦合到驱动和感测结构104、106。
50.应当理解,为了便于说明,图1a-1c中描述的枢转连杆已被简化。这里提供了枢转连杆的进一步说明和细节。
51.图2示出了根据一些非限制性实施例的图1c的示例mems装置在驱动模式下的运动。mems装置100可以是被配置为通过检测科里奥利力来检测角速率的mems陀螺仪。在该示例中,检测质量块102被驱动以沿着x轴振荡,并且当检测质量块102在页面平面内围绕平面外轴(例如,z轴)进行角运动时,科里奥利力产生,从而导致检测质量块沿着y轴移位。mems装置100可以被配置为感测检测质量块的位移以测量旋转。
52.如本文所述,mems装置100可包括一个或多个驱动结构104,被配置为沿着x轴驱动检测质量块。在图2所示的实施例中,mems装置100包括两个驱动结构104a、104b,其耦合到检测质量块102并且基本上彼此相对地设置。驱动结构104a、104b的运动可以经由杠杆116a、116b传递到检测质量块102。该对杠杆可形成本文所述的枢转连杆的全部或一部分。一对杠杆116可耦合到相应的驱动结构104。当驱动结构104摆动时,如图1b所示,该对杠杆116可以围绕枢转点117枢转。在一些实施例中,如本文所述,每个杠杆116具有多个枢转点。
53.图3示出了根据一些非限制性实施例的图1c的示例mems装置100在感测模式下的运动。如图3所示,感测结构106a、106b被配置为感测由科里奥利力引起的检测质量块102沿y轴的运动,科里奥利力是由于检测质量块102绕z轴旋转而产生的。因此,mems装置100可被配置为通过检测质量块102沿y轴的位移来感测关于平面外轴(例如,z轴)的旋转。感测结构106a、106b的运动可通过杠杆116a、116b耦合到检测质量块102。一对杠杆116可耦合到相应的感测结构106。当检测质量块102振荡时,如图1c所示,该对杠杆116可以围绕枢转点117枢转。在一些实施例中,如本文所述,每个杠杆116具有多个枢转点。
54.尽管在所示实施例中,驱动模式被配置为沿着x轴,而感测模式被配置成沿着y轴,但是其他配置也是可能的。例如,驱动和感测运动可以沿着x、y和/或z轴的任意组合。
55.根据本文描述的技术的方面,mems装置可以包括具有多于两个杆的枢转连杆。图4a-4d示出了根据一些非限制性实施例的三杆枢转连杆的示例。如图4a-4d所示,枢转连杆400包括通过连接器402连接在一起的两个段116a、116b(例如杠杆)。在图4a所示的实施例中,与两个杆枢转连杆不同,连接器404不直接连接到杠杆116a、116b,而是通过弹簧404、插件406和连接器402的组合将杠杆116a和116b连接在一起。发明人已经认识到,当允许连接段116a、116b的连接器402弯曲时,连接器可能硬化,从而导致不希望的硬化,特别是当连接器的位移在微米量级时。这种弯曲可表现为立方刚度,这可导致陀螺仪操作中的误差。
56.三杆连杆相对于两杆连杆具有额外的自由度。特别地,当杠杆116a、116b的近端都沿相同方向移动(例如,通过沿相反方向旋转)时,如图4a所示,额外的自由度防止连接器402弯曲,从而产生立方刚度。特别地,当第一杠杆116a和第二杠杆116b沿相反方向旋转时,防止连接器402相对于检测质量块旋转。相反,弹簧404允许耦合到每个杠杆116a、116b的插件406移动。关于两杆连杆所描述的正交的有益减少仍然通过三杆连杆实现,同时也减少或防止了完全立方刚度。
57.三杆连杆也可以从其枢轴角度进行观察。例如,第一段116a可以被认为是第一杆,第二段116b可以被认为第二杆,并且连接器402可以被认为为第三杆。第一杆116a可以在三杆连杆400的第一端(例如通过弹簧)处(例如在一些实施例中通过梭108)耦合到检测质量块。第一端可包括第一固定枢轴410,其中第一杆116a被配置为围绕第一固定枢轴410枢转。第二杆116b可在三杆连杆400的第二端处(例如通过弹簧)耦合到检测质量块(例如在一些实施例中通过梭108)。第二端可包括第二固定枢轴412,其中第二杆116b被配置为围绕第二固定枢轴412枢转。
58.如本文所述,第一和第二杆116a、116b可通过连接器402耦合在一起。连接器402可被配置为围绕第一动态枢轴414相对于第一杆116a枢转。连接器402可以被配置为围绕第二动态枢轴416相对于第二杆116b枢转。因此,第一、第二和第三杆可以被配置为经由本文所述的动态枢轴相对于彼此枢转。
59.枢轴可以是动态的,因为枢轴设置在配置为枢轴的两个组件之间。例如,第一动态枢轴414设置在第一杆116a和连接器402之间。第一杆116a和连接器402都被配置为围绕彼此枢转。相反,在第一杆116在第一固定枢轴410处耦合到梭108的情况下,只有一个部件(第一杆116a)被配置为相对于另一部件枢转。例如,在一些实施例中,固定枢轴可以设置在枢转部件(例如第一杆116a)耦合到相对于mems装置100的底层基底固定的部件(例如锚112)的点处。
60.图4b示出了图4a的三杆连杆400,其中第一杠杆116a和第二杠杆116b沿相同方向旋转(例如,其中第一和第二杠杆116a、116b的近端沿相反方向移动)。如图4b所示,当杠杆116a、116b沿相反方向移动时,包括402、404和406的连杆机构防止检测质量块的倾斜。如图4b所示,当第一杠杆116a和第二杠杆116b旋转时,连接器402不变形,保持机械连杆的线性。连接器402足够硬以抵抗如图4b所示的s形形式的弯曲,从而防止检测质量块的倾斜,因此减小陀螺仪的正交。因此,三杆连杆400可以通过降低立方刚度而不影响倾斜刚度比来减少非线性。
61.图4c示出了在mems装置中实现的三杆连杆400的示例,其中三杆联动400耦合到驱动结构104。图4d示出了三杆连杆400’的另一示例,其中三杆连杆400’耦合到驱动结构104。
62.三杆连杆可以以任何合适的方式耦合到驱动结构。在图4c中,三杆连杆400通过两个折叠弹簧408耦合到驱动结构。在图4d中,三连杆连杆通过单个弹簧410耦合到驱动机构。
63.在图4c-4d所示的实施例中,三杆杆连400、400’耦合到锚112。锚112可耦合到底层基底(未示出),如本文所述。在所示实施例中,每个杠杆116a、116b耦合到相应的锚。然而,任何合适数量的锚可以耦合到杠杆116a、116b中的一个或多个。在一些实施例中,例如,如图4d所示,杠杆可以在多个点处耦合到锚112。
64.在图4c所示的实施例中,三杆连杆400的第一端和第二端连接到检测质量块102。在图4c的所示实施方案中,三杆连杆400通过弹簧410直接连接到检测质量块,而不使用梭,然而,其他配置也是可能的。
65.在一些实施例中,三杆连杆400的第一端和第二端可通过锚112耦合到检测质量块102。因此,本文所述的第一和第二固定枢轴可围绕锚(例如锚112)。
66.图4e示出了根据一些非限制性实施例的在正常操作模式下的图4a-4d的示例性三杆枢转连杆。图4f示出了根据一些非限制性实施例的在倾斜操作模式下的图4a-4d的示例性三杆枢转连杆。
67.图5a-5d示出了根据一些非限制性实施例的四杆枢转连杆500的示例。如图5a所示,四杆枢转连杆500可包括箱形弹簧502。相应的箱形弹簧502可通过相应的系绳504连接到相应的杠杆116、116b,并通过连接器402彼此连接。在所示实施例中,四杆连杆通过单个t形连接连接到驱动结构104,然而,其他配置也是可能的。例如,在一些实施例中,四杆连杆500可以通过两个或更多个弹簧耦合到驱动结构104。
68.四杆连杆500可以从其枢轴的角度观察。例如,第一杠杆116a可以被认为是第一杆,第二杠杆116b可以被认为第二杆,并且相应的箱形弹簧502可以被认为枢转连杆的第三杆和第四杆。如本文所述,第一杆116a可以在四杆连杆500的第一端处(例如,通过弹簧和/或通过锚112)耦合到检测质量块102,并且可以被配置为围绕第一固定枢转点(未示出)枢转。第二杆116b可以在四杆连杆500的第二端处(例如,通过弹簧和/或通过锚112)耦合到检测质量块,并且可以被配置为围绕第二固定枢转点(未示出)枢转。
69.第一杆116a和第二杆116b可以通过箱形弹簧502(例如,第三杆和第四杆)耦合在一起。第三杆可以在动态枢轴510b处耦合到第一杆116a,并被配置为围绕动态枢轴510b枢转,如图5b-5c所示。第四杆可以在第二动态枢轴510a处耦合到第二杆116b,并被配置为围绕第二动态枢轴510a枢转,如图5b-5c所示。第三和第四杆可以在共享的动态枢轴510c、510d处耦合在一起,并被配置为围绕共享的动态枢轴510c、510d枢转,如图5b-5c所示。因此,第一杆、第二杆、第三杆和第四杆可以被配置为经由本文所述的动态枢轴相对于彼此枢转。本发明人已经认识到,四杆连杆有利于降低mems装置对剪切应力的敏感性。
70.在图5a所示的实施例中,四杆连杆500耦合到锚112。如本文所述,锚可以耦合到底层基底(未示出)。在所示实施例中,每个杠杆116a、116b耦合到相应的锚。然而,任何合适数量的锚可以耦合到杠杆116a、116b中的一个或多个。在一些实施例中,例如,杠杆可以在多个点处耦合到锚。
71.图5b是示出图5a所示的四杆连杆500的枢轴点的示意图。如图5b所示,四杆连杆500具有每个杆的至少两个枢转点。特别地,四杆连杆500的弹簧分别包括两个枢轴510a-d。在所示实施例中,各个枢轴510a-d设置在每个弹簧的相对对角线上。如本文所述,在一些实
施例中,杠杆116a、116b的双枢轴510a-d可以用箱形弹簧实现。
72.图5c示出了与驱动结构104耦合的图5a的四杆连杆500。如本文所述,四杆连杆500可以将驱动结构104在驱动模式下的运动传递到mems装置的检测质量块,使得当四杆连杆500由于驱动结构104的振动而枢转时,检测质量块被移位。
73.如本文所述,四杆连杆500可耦合到一个或多个锚112。如所示实施例中所示,第一杠杆116a在第一点510f处耦合到锚112,而第二杠杆116a在第二点耦合到锚112。点510f和510e可以充当支点,第一和第二杠杆116a、116b可以围绕支点枢转。在一些实施例中,点510f和510可包括本文所述的第一和第二固定枢轴。
74.在一些实施例中,驱动结构104可以耦合到一个或多个锚112。例如,如图5c所示,驱动结构104耦合到臂514(例如,通过一个或多个u形弹簧516)。然后将臂514耦合到锚112。例如,如图5c所示,臂514在多个点处耦合到锚112。在所示实施例中,驱动结构104耦合到两个锚112,然而,驱动结构104可以耦合到任何合适数量的锚。
75.图5d是图5c所示的四杆连杆500的箱形弹簧的放大图。特别地,图5d示出了在第一和第二杠杆116a、116b的端部处的第一和第二动态枢轴510a、510b。
76.图5e示出了根据一些非限制性实施例的在正常操作模式下的图5a-5d的示例性四杆枢转连杆。图5f示出了根据一些非限制性实施例的在倾斜操作模式下的图5a-5d的示例性四杆枢转连杆。如图5e-5f所示,枢转连杆的双箱形弹簧元件在倾斜操作模式下充当刚性杆,从而允许连杆充当三杆系统。
77.图6示出了根据一些非限制性实施例的四杆枢转连杆600的另一示例。图6的枢转连杆600包括四个段,每个杠杆具有两个段。特别地,枢转连杆600包括第一杠杆116a、第二杠杆116b和弹簧522。各个弹簧可以通过系绳520连接到各个杠杆116a和116b。
78.在图6所示的实施例中,四杆连杆通过驱动结构104将杠杆116a、116b耦合在一起。特别地,各个杠杆116a和116b均耦合到驱动结构104,而不直接耦合在一起。本发明人已经认识到,图6中所示的四杆连杆设计对于降低mems装置对封装应力的灵敏度同时降低立方体刚度是有利的。
79.各个杆116a、116b可以耦合到一个或多个锚112。例如,在所示实施例中,每个杠杆116a和116b可以连接到各个锚112上。在所示的实施例中每个杠杆116a和116b在多个点处耦合到各个锚112上。
80.在一些实施例中,驱动结构104可以耦合到一个或多个锚112。例如,如图6所示,驱动结构104连接到臂514(例如,通过一个或多个折叠弹簧524)。然后将臂514耦合到锚112。在所示的实施例中,驱动结构104耦合到两个锚112,然而驱动结构104可以耦合到任何合适数量的锚。
81.图7示出了根据一些非限制性实施例的五杆枢转连杆700的示例。图7中所示的五杆连杆700结合图5a-6中所示的四杆枢转连杆的方面。例如,五杆枢转连杆700包括通过系绳704连接到相应杠杆116a、116b的相应的箱形弹簧702。此外,相应杠杆116a和116b通过驱动结构连接在一起,而不是例如通过连接器直接连接在一起。特别地,每个箱形弹簧702通过系绳704耦合到弹簧706。每个弹簧706耦合到驱动结构104。发明人已经认识到,图7中所示的五杆连杆设计对于减少正交、剪切和法向应力敏感性以及由增加的立方刚度引起的非线性可是有利的。
82.五杆连杆700也可以从其枢轴的角度观察。例如,第一杠杆116a可以被认为是第一杆,第二杠杆116b可以被认为为第二杆,箱形弹簧702可以被认为第三杆和第四杆,并且弹簧706和系绳704一起可以被看作是第五杆。第一杆116a可以在五杆连杆700的第一端处(例如通过弹簧和/或锚112)耦合到检测质量块。第一端可以包括第一固定枢轴(未示出),其中第一杆116a被配置为围绕第一固定枢轴枢转。第二杆116b可以在四杆连杆700的第二端处(例如,通过弹簧和/或锚112)耦合到检测质量块。第二端可包括第二固定枢轴(未示出),其中第二杆116b被配置为围绕第二固定枢轴枢转。
83.相应的箱形弹簧702可以在第一和第二动态枢轴714、716处连接到第一和第二杠杆116a、116b中的相应一个。相应的箱形弹簧702可以通过弹簧706和系绳704连接在一起。每个箱形弹簧702都可以在第三和第四动态枢轴718、720处连接到系绳704,并被配置为绕第三和第四动态枢轴718、720枢转。因此,五杆连杆700的每个杆可以被配置为相对于五杆连杆700的其他杆枢转。
84.如图7所示,驱动结构可以耦合到一个或多个锚112。例如,如图7中所示,驱动结构104耦合到臂514(例如,通过单个u形弹簧708)。然后将臂514耦合到锚112。在所示的实施例中,驱动结构104耦合到两个锚112,然而驱动结构104可以耦合到任何合适数量的锚。
85.如本文所述,mems陀螺仪容易受到许多误差源的影响,包括正交、对剪切和法向应力的敏感性以及由立方刚度引起的非线性。如本文进一步描述的,枢转连杆的不同类型和设计可以减少或完全消除这些误差源中的一个或多个。
[0086][0087]
表1:运动学枢轴连杆类型和设计的误差源
[0088]
如表1所示,本文所述的枢转连杆具有优点和权衡。特别地,与具有少于三个杆的枢转连杆相比,本文所述的具有至少三个杆的每个枢转连杆设计减少了由增加的立方刚度引起的非线性。在某些情况下,根据希望消除或减少的误差源的类型,可能更希望选择一种设计而不是另一种设计。例如,在某些情况下,增加的正交可能是可接受的折衷,因为可以通过使用正交微调电极来电学地考虑正交,而以这种方式考虑其他误差源可能是不可能
的。
[0089]
如本文所述,运动学连杆和相关方面可以在mems陀螺仪(例如,被配置为感测侧倾、俯仰和/或偏航旋转的mems陀螺仪)中实现。在一些实施例中,示例mems装置100可以形成较大mems装置的一部分。图8示出了根据一些非限制性实施例的具有四个检测质量块802的示例mems陀螺仪800。在一些实施例中,图8的mems陀螺仪800可以被配置为感测围绕两个或更多个轴的旋转。图8示出了具有四个象限804的mems陀螺仪800的示例,所述象限804耦合在一起并以2x2的形式布置。图8的mems陀螺仪的每个象限804可以具有检测质量块802和本文所述的一个或多个枢转连杆。
[0090]
各个象限中的检测质量块802可以被配置为相对于相邻检测质量块802逆相位移动。也就是说,检测质量块802可以被配置成在驱动模式中相对于垂直地和水平地与检测质量块802相邻的检测质量块的运动,沿着第一轴在相反的方向上移动,并且相对于对角地邻近检测质量块802。在感测模式中,检测质量块802可以被配置为相对于垂直和水平地与检测质量块相邻的检测质量块的运动沿着基本上垂直于第一轴的第二轴在相反方向上移动,并且相对于对角地与检测质量块802相邻的检测质量块的运动在相同方向上沿着第二轴移动。
[0091]
图9示出了根据一些非限制性实施例的具有十二个检测质量块802的示例mems陀螺仪910。具体地,图9示出了具有三个列920a、920b、920c的mems陀螺仪910的示例,每个列被配置为感测围绕相应轴的旋转(例如,俯仰、侧倾或偏航旋转)。在一些实施例中,mems陀螺仪910可以被配置为具有两个列,其中一个或多个列被配置为感测围绕多个轴的旋转(例如,俯仰、侧倾和/或偏航旋转中的一个或更多个)。每列可包括至少三个检测质量块802,其中所示实施例的mems陀螺仪910每列具有四个检测质量块。图9的mems陀螺仪910可以实现为具有所描述的枢转连杆和相关机构。例如,在一些实施例中,图9的mems陀螺仪910可以在mems陀螺仪910的一列或多列中(例如,在被配置为感测偏航旋转的mems陀螺仪的列中)实现本文所述的一个或多个枢转连杆。
[0092]
具有本文所述类型的枢转连杆的mems装置可部署在各种设置中以检测角速率,包括运动、医疗保健、军事和工业应用等。mems装置(例如,mems惯性传感器,例如mems陀螺仪)可以安装为部署在监测与运动相关的身体活动和表现、患者健康、军事人员活动或用户感兴趣的其他应用中的可穿戴传感器。mems陀螺仪可以设置在智能手机中,并且可以被配置为感测侧倾、俯仰和/或偏航角速率。
[0093]
图10是示出系统1000的框图,该系统1000包括mems装置1002、电源单元1004、感测电路1006和输入/输出(i/o)接口1008。在一些实施例中,mems装置可以包括本文所述的mems装置中的任何一个或其组合。在一些实施例中,mems装置可以包括被配置为感测侧倾、俯仰和/或偏航角速率的mems陀螺仪。
[0094]
系统1000可以经由有线连接或无线地将表示感测角速率的数据周期性地发送到外部监控系统,例如计算机、智能手机、平板电脑、智能手表、智能眼镜或任何其他合适的接收设备。i/o接口1008可以被配置为经由wi-fi、蓝牙、蓝牙低能量(ble)、zigbee、thread、ant、ant+、ieee802.15.4、ieee 802.11.ah或任何其他合适的无线通信协议来发送和/或接收数据。可替换地或附加地,i/o接口1008可以被配置为使用专有连接协议来发送和/或接收数据。i/o接口1008可以包括一个或多个天线,例如微带天线。在一些实施例中,i/o接口
1008可以连接到电缆,并且可以被配置为通过电缆发送和/或接收信号。
[0095]
可以使用电源单元1004为系统1000供电。电源单元1004可以被配置为为感测电路1006、i/o接口1008和/或mems装置1002中的一些或全部供电。在一些实施例中,电源单元1004可以包括一个或多个电池。在至少一些实施例中,系统1000可以消耗足够少的功率,以允许其仅基于电池功率在延长的时间段内运行。在一些实施例中,一个或多个电池可以是可再充电的。电源单元1004可包括一个或多个锂离子电池、锂聚合物(lipo)电池、基于超级电容器的电池、碱性电池、铝离子电池、汞电池、干电池、锌碳电池、镍镉电池、石墨烯电池或任何其他合适类型的电池。在一些实施例中,电源单元1004可以包括将ac功率转换成dc功率的电路。例如,电源单元1004可以从系统1000外部的电源(例如经由i/o接口1008)接收ac电力,并且可以向系统1000的一些或所有组件提供dc电力。在这种情况下,电源单元1004可以包括整流器、调压器、dc-dc转换器或用于电力转换的任何其他合适的设备。
[0096]
在一些实施例中,电源单元1004可以包括能量收集组件和/或能量存储组件。可以从周围环境中收集能量并存储能量以在需要时为系统1000供电,这可以包括周期性、随机性或连续供电。可以基于系统1000的预期环境来选择所实现的能量收集组件的类型,例如基于系统1000可能经历的预期运动幅度和频率,系统可能经历的应力量,系统可能经历的曝光量,和/或系统可能暴露的温度,以及其他可能的考虑因素。合适的能量采集技术的示例包括热电能量采集、磁振动采集、电过应力采集、光伏采集、射频采集和动能采集。在一些实施例中,能量存储部件可以包括超级电容器
[0097]
如上所述,本文所述类型的mems装置可以以各种设置来部署,例如,以检测角速率。一种这样的设置是在汽车或其他车辆中,例如船或飞机。图11示意性地示出了根据一些非限制性实施例的包括系统1000的车辆1100。系统1000可以设置在车辆1100的任何适当位置。在一些实施例中,系统1000可以包括附接到车辆1100的适当部分的封装或外壳,其中mems装置在内部。在一些实施例中,系统1000可以被配置为感测侧倾、俯仰和/或偏航角速率。系统1000可以被配置为使用i/o接口1008向设置在车辆1100中的计算机系统和/或向设置在车辆1100外部的基站上的计算机系统提供感测的角速率。
[0098]
可以使用具有本文所述类型的枢转连杆的mems装置的另一设置是用于运动应用的传感器装置,例如网球、游泳、跑步、棒球或曲棍球等。在一些实施例中,本文所述类型的mems装置可以是可穿戴健身设备。在其他实施例中,传感器可以是一件运动设备的一部分,例如是网球拍、棒球棒或曲棍球棒的一部分。来自传感器的感测数据可用于评估用户的性能。
[0099]
本文描述的技术的各方面可以提供一个或多个益处,其中一些已经在前面描述过。本文所描述的技术的各方面提供了具有至少三个杆的枢转连杆以及用于减小诸如mems陀螺仪的mems装置的正交性、对剪切和法向应力的敏感性以及立方刚度的其他方面。应当理解,并非所有方面和实施例都必须提供本文描述的所有益处。此外,应当理解,这里描述的技术的方面可以为这里描述的那些提供额外的益处。
[0100]“基本上在一个方向上”和“基本上平行于一个方向”应在本文中解释为平行于该方向或相对于该方向成小于20
°
的角度,包括该范围内的任何值。
[0101]
在一些实施例中,术语“近似”和“大约”可用于表示目标值的
±
20%,在一些实施方案中,其在目标值的
±
10%内,在某些实施方案中在目标值
±
5%内,而在一些实施方式
中,其仍在目标值
±
2%内。术语“近似”和“大约”可以包括目标值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1