用于激光雷达设备的计算机单元和激光雷达设备的制作方法
1.本发明涉及一种用于激光雷达设备的计算机单元,所述激光雷达设备具有激光源和激光雷达传感器,所述激光源设置用于将激光信号发射到发送路径中,所述激光雷达传感器布置在接收路径中,并且所述激光雷达传感器设置用于探测反射到所述接收路径中的激光信号,并且其中,所述计算机单元设置用于,处理所反射的激光信号的多个激光信号数据点。此外,本发明涉及一种具有这种计算机单元的激光雷达设备。
背景技术:
2.在未来几年,机动车的高度或完全自主的行驶(3-5级)将在道路交通中增加。自主机动车的所有已知的概念都需要不同传感器概念(例如摄像机概念、雷达概念或激光雷达传感器概念)的组合。激光雷达传感器概念能够借助激光雷达设备来实现。这种激光雷达设备具有激光源,所述激光源将激光信号发射到发送路径中。这个激光信号在激光雷达设备的周围环境中的对象处发生反射。所反射的激光信号又射到激光雷达设备上。它在那里被引导到接收路径中。在接收路径中布置有激光雷达传感器,所述激光雷达传感器探测所反射的激光信号。然后,激光雷达传感器由测得的飞行时间差计算对象与激光雷达设备的距离。在此,所述对象及其位置被编码在所反射的激光信号的多个激光信号数据点中。如果所述对象是高反射的并且尤其是回射的,则可能会出现相邻激光信号数据点的串扰。这被称为过度辐射效应(图像浮散,英语:blooming)。这样的过度辐射效应例如在分配给回射的交通标志的激光信号数据点中是可见的。
3.在此,过度辐射效应在具有并行测量的激光雷达设备(例如闪光激光雷达、竖直闪光激光雷达或水平闪光激光雷达)中是尤其强烈的。然而,它们也能够出现在在没有并行测量的情况下工作的激光雷达设备中。这尤其是适用的,如果散射光的介质布置在接收路径中。这种介质例如能够是玻璃罩上的雨滴或划痕。
4.过度辐射效应会使激光雷达设备的测量失真。因此,它们对自主行驶的机动车的安全来说是有潜在危险的。因此,过度辐射效应例如导致,高估了激光雷达设备的周围环境中的对象的尺寸。然后,根据激光雷达传感器的架构,可能会出现对自主行驶的车辆的驾驶安全来说安全关键的场景。例如,如果垂直过度辐射效应占主导地位,则例如能够使桥形路标牌(即横跨行车道的结构,在所述结构处在行车道上方安置交通标志)的识别变得困难。由于出现的过度辐射效应引起的桥形路标牌的尺寸的高估,桥形路标牌能够被探测为行车道上的“墙壁”。然后,这样的探测可能会启动自主行驶的机动车的紧急制动。出于交通安全的原因,必须避免这种情况。但是,与此同时可能的是,探测位于桥形路标牌下方且可能阻塞行车道的物体。
技术实现要素:
5.根据本发明,提供了一种计算机单元,所述计算机单元设置用于,将过度辐射效应从所反射的激光信号的激光信号数据点中滤除。
6.发明优点
7.计算机单元具有这种优点:现在能够将过度辐射效应从所反射的激光信号的激光信号数据点中滤除。同时,由此也保留了所反射的激光信号中的、能够分配给真实对象的那些激光信号数据点。由此,能够辨识在过度辐射区域中的真实对象。这可以以简单的方式实现。因此,例如能够解决在桥形路标牌处出现过度辐射效应的问题。桥形路标牌能够可靠地被辨识为桥形路标牌。同时,于是也可能的是,将位于桥形路标牌下方的物体辨识为真实对象。
8.也可能的是,所述计算机单元设置用于,辨识分配给回射器(r
ü
ckstrahler)的那些激光信号数据点。
9.在辨识激光信号数据点中的过度辐射区域的第一步骤是辨识能够分配给回射器的那些激光信号数据点。恰恰是对于这些回射器或者说高辐射对象,更多地出现了过度辐射效应。在此发生相邻的激光信号数据点的串扰,使得真实对象的可靠识别变得困难。为了能够可靠地识别且校正这种效应,精确地确定能够分配给回射器的激光信号数据点是决定性的。
10.在一个特别的实施方式中设置,计算机单元设置用于,
[0011]-计算所述激光信号数据点中的每个的反射率,优选在使用其强度水平的情况下;
[0012]-将每个激光信号数据点的所计算的反射率与预确定的反射率极限值进行比较;
[0013]-如果所计算的反射率大于所述预确定的反射率极限值,则将所述激光信号数据点分配给回射器。
[0014]
以此,说明了用于确定能够分配给回射器的那些激光信号数据点的一种明确的算法。为此分析所反射的激光信号的强度水平。在此首先假设,存在大于激光信号数据点的像素的真实对象。在激光雷达传感器处测得的强度水平p
接收
与p
发送
r/r2成正比(p
接收
~p
发送
r/r2)。其中,p
发送
表示所发射的激光功率,r表示真实对象的反射率,并且r表示激光雷达传感器和真实对象之间的距离。因此,表达式p
接收
r2/p
发送
与反射率成比例。以此,现在能够对于每个激光信号数据点由强度水平计算反射率。将这个所计算的值与预确定的反射率极限值进行比较。在此,它能够是反射率值,所述反射率值由100%反射的朗伯目标预期。在此,回射器具有这种独特的特性:它们的表观朗伯反射率远超过100%。典型地,在此达到在1000%和100000%之间的反射率的值。因此,因此,具有远超过100%的反射率的所有激光信号数据点都被辨识为回射器。
[0015]
替代地,有利地设置,计算机单元设置用于,辨识特定的激光信号数据点,所述特定的激光信号数据点与分配给所述回射器的激光信号数据点位于同一激光信号数据点平面中和/或与分配给所述回射器的激光信号数据点具有距所述激光雷达设备的相同的间距。
[0016]
在已经辨识出分配给回射器的那些激光信号数据点之后,进行特定的激光信号数据点的这种辨识。在此,激光信号数据点平面能够沿水平方向和/或垂直方向。在此,如所阐述的,在回射器的周围环境中的所有这些激光信号数据点尤其被视为过度辐射效应的候选者(kandidaten)。同时,也选择与分配给所述回射器的激光信号数据点具有距所述激光雷达设备的相同的间距的那些激光信号数据点。在这些激光信号数据点中,能够编码位于回射器附近的真实对象。这样的真实对象必须能够被可靠地辨识。
[0017]
此外,非常有利的是,计算机单元设置用于,
[0018]-确定所述特定的激光信号数据点的强度水平;
[0019]-将每个激光信号数据点的所确定的强度水平与预确定的强度水平极限值进行比较;
[0020]-如果所确定的强度水平大于所述预确定的强度水平极限值和/或所确定的强度水平具有不连续的走向,则将所述特定的激光信号数据点分配给真实对象。
[0021]
以此,说明了用于确定能够分配给真实对象的那些特定的激光信号数据点的一种明确的算法。为此确定特定的激光信号数据点的强度水平。这例如能够在水平方向或垂直方向上进行。在此,对于能够分配给过度辐射效应的激光信号数据点,预期它们的强度水平下降到回射器的区域之外(例如在上方和下方以用于水平分析;或在右侧和左侧以用于垂直分析)。强度水平下降的这种行为对于过度辐射效应来说是典型的,因为如果激光信号数据点和回射器之间的距离增加,则过度辐射效应被减小。因而,如果激光信号数据点分配给真实对象,则预期强度水平中的不连续性。在过度辐射效应的情况下不能够出现这样的不连续性。因此,具有其强度水平的不连续的行为的所有激光信号数据点都能够分配给真实对象。这种方法尤其能够可靠地使用在这样的激光雷达传感器中,所述激光雷达传感器将强度水平确定为所反射的激光信号的时间积分。
[0022]
根据本发明的一个优选实施方式设置,计算机单元设置用于,
[0023]-确定所述特定的激光信号数据点的回波宽度;
[0024]-将所确定的回波宽度与预确定的回波宽度极限值进行比较;
[0025]-如果所确定的回波宽度大于所述预确定的回波宽度极限值,则将所述特定的激光信号数据点分配给真实对象。
[0026]
同样地,以此说明了用于确定能够分配给真实对象的那些特定的激光信号数据点的一种明确的算法。为此,确定特定的激光信号数据点的回波宽度。这尤其能够用于,辨识位于回射器附近的真实对象。在此,可以区分三种不同的状况。如果在真实对象和回射器之间的距离大于相关联的所反射的激光信号的回波宽度,则在特定的激光信号数据点中预期两个单独的激光信号数据点。如果在对象和回射器之间的距离小于相关联的激光信号的回波宽度,则在特定的激光信号数据点中仅预期一个激光信号数据点。这个激光信号数据点于是示出真实对象的激光信号数据点和回射器的激光信号数据点的叠加。因此,相应的激光信号数据点具有增大的回波宽度,所述增大的回波宽度大于真实对象或回射器的单个反射的激光信号的回波宽度。最后可能会出现第三情况,在所述第三情况中在真实对象和回射器之间的距离相同。在这种情况下,在特定的激光信号数据点中也仅预期一个激光信号数据点。然而,这个激光信号数据点也示出真实对象的激光信号数据点和回射器的激光信号数据点的叠加。因此,在此也将预期与在分离的激光信号数据点的情况下更大的回波宽度。特别地,在这种情况下,然而通过叠加也出现相应的激光信号数据点的峰值强度水平的升高。如已经描述的,这种强度水平又能够用于辨识真实对象。
[0027]
其次,有利的是,计算机单元设置用于,将没有分配给真实对象的特定的激光信号数据点从所述多个激光信号数据点中辨识为过度辐射激光信号数据点并且滤除。
[0028]
这个步骤通过以下方式进行:从激光信号数据点中滤除所有以下特定的激光信号数据点,它们在其强度水平方面具有由过度辐射效应预期的行为并且具有与所反射的激光
信号的回波宽度相同的回波宽度。这些激光信号数据点被辨识为过度辐射激光信号数据点。同时,保留在所述多个激光信号数据点中的、在其强度水平中具有不连续的行为的那些特定的激光信号数据点。在此,在本发明的一个实施方式中同样可能的是,借助合适的函数拟合强度水平的随着激光信号数据点距回射器的距离增加的降低。这例如能够是指数函数。然后,这个拟合的减少的平方能够说明,真实对象是否潜在地存在于过度辐射激光信号数据点中。此外,能从强度水平的值中减去拟合函数,并且具有高于一定强度水平极限值的剩余强度水平的所有激光信号数据点都能够分配给真实对象。
[0029]
同样有利地设置,计算机单元设置用于,确定分配给真实对象的激光信号数据点在所述过度辐射激光信号数据点中存在的概率。
[0030]
这甚至当激光信号数据点已经被辨识为过度辐射激光信号数据点时也能够进行。为此,通过使用激光雷达传感器的所基于的统计行为来估计每个过度辐射激光信号数据点的噪声。尤其地,在噪声~(强度)
1/2
中假定泊松分布。然后,激光雷达传感器能够说明具有不同反射率的目标存在于过度辐射激光信号数据点的位置处的概率。为此,使用正态分布的各种sigma环境。这种自我评估提供了一种稳健的方法,所述方法能够匹配于过度辐射效应可能更多出现的各种环境条件。在此,例如可设想玻璃罩上的雨滴。
[0031]
最后,有利地提供具有此类的计算机单元的激光雷达设备。
[0032]
以这种方式,能够提供激光雷达设备,所述激光雷达设备能够利用根据本发明的计算机单元的所提到的优点。在此,尤其有利的是,计算机单元能够用于不同的激光雷达设备。一些激光雷达设备例如使用激光雷达传感器,所述激光雷达传感器将强度水平确定为所反射的激光信号的峰值信号。反之,其他激光雷达传感器代替地使用激光信号的时间积分。在此说明的计算机单元同样适用于两种类型的激光雷达传感器。
[0033]
在从属权利要求中说明并且在说明书中描述本发明的有利的扩展方案。
附图说明
[0034]
参照附图和以下描述更进一步地阐述本发明的实施例。附图示出:
[0035]
图1a示出带有安置在桥形路标牌上的交通标志的行车道的第一前视图;
[0036]
图1b示出编码图1a的视图的多个激光信号数据点的第一前视图;
[0037]
图2a示出带有安置在桥形路标牌上的交通标志的行车道的第二前视图,其中,真实对象布置在所述交通标志下方;
[0038]
图2b示出编码图2a的视图的多个激光信号数据点的第二前视图;
[0039]
图3a示出带有图2a的交通标志和真实对象的行车道的侧视图,以及在第一配置中的与所述交通标志和真实对象相关联的激光信号数据点的时间分辨的强度水平分布;
[0040]
图3b示出带有图2a的交通标志和真实对象的行车道的侧视图,以及在第二配置中的与所述交通标志和真实对象相关联的激光信号数据点的时间分辨的强度水平分布;以及
[0041]
图3c示出带有图2a的交通标志和真实对象的行车道的侧视图,以及在第三配置中的与所述交通标志和真实对象相关联的激光信号数据点的时间分辨的强度水平分布。
具体实施方式
[0042]
本发明涉及一种用于激光雷达设备的计算机单元,所述激光雷达设备具有激光源
和激光雷达传感器,所述激光源设置用于将激光信号发射到发送路径中,所述激光雷达传感器布置在接收路径中,并且所述激光雷达传感器设置用于探测反射到所述接收路径中的激光信号,并且其中,所述计算机单元设置用于,处理所反射的激光信号的多个激光信号数据点4。在此,借助激光源来发射激光信号。这个激光信号在激光雷达设备的周围环境中的对象处被反射。所反射的激光信号在激光雷达设备的接收路径中借助激光雷达传感器来探测。从这些探测到的所反射的激光信号中求取多个激光信号数据点4,所述多个激光信号数据点映射激光雷达设备的周围环境。
[0043]
在图1a中示出激光雷达设备的周围环境。该周围环境包括带有桥形路标牌2的行车道1,在所述桥形路标上安置有交通标志3。
[0044]
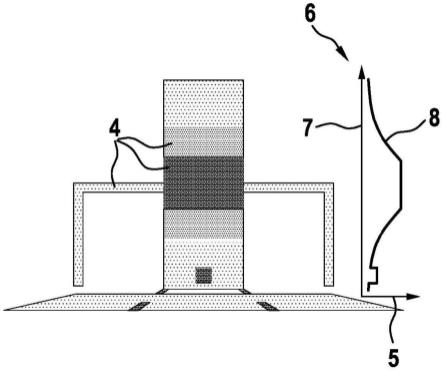
然后,在图1b中,借助多个激光信号数据点4示出图1a的所述周围环境的图像。这些激光信号数据点4中的每个都具有强度水平5,所述强度水平借助不同激光信号数据点4的颜色编码来说明。激光信号数据点4越暗,其相关联的强度水平5就越高。这种关系同样在图6中示出。在水平轴上,相对于高度7绘制强度水平5。在此,产生了高度7随强度水平5变化的函数8。
[0045]
在此,在图1b中也可识别出,在借助激光信号数据点4的映射中的交通标志3的尺寸在垂直方向上被高估。这是基于所谓的过度辐射效应。在此,涉及相邻的激光信号数据点4的串扰。这尤其能够在强反射或回射的对象(如交通标志3)处出现。如同样在图1b中能识别出的,在借助激光信号数据点4的映射中的交通标志3仿佛作为“墙壁”出现在行车道1上。然而,这种由于过度辐射效应导致的错误映射在行车道1上自主行驶的机动车的交通安全方面是危险的。因此,自主行驶的机动车在看到行车道1上的“墙壁”时必须启动紧急制动。这种“错误的”反应对于交通安全来说是危险的且必须被避免。
[0046]
在图2a中图示说明交通安全的另一个潜在威胁。再次示出带有桥形路标牌2和交通标志3的行车道1。然而,现在,行车道1上的真实对象9布置在交通标志3下方。这个真实对象9可能代表对于自主行驶的车辆的危险。自主行驶的车辆可能必须避开真实对象9。然而,为此也需要在激光信号数据点4中可靠地辨识真实对象9。
[0047]
然而,在图2b中现在可以识别出,在激光信号数据点4中的、尤其是布置在交通标志3下方(即靠近回射器)的真实对象9可能会落入激光信号数据点4中的过度辐射效应的区域中。存在这种危险:在过度辐射效应中不再识别出真实对象9。再次,在图6中示出高度7随强度水平5的变化。在此,相关联的函数8在高度7的值小的情况下示出小的平台,所述小的平台相应于真实对象9。
[0048]
总而言之,存在一种需求:(尤其是在回射器的情况下)消除过度辐射效应,并且在此然而同时保留(在过度辐射中)能够分配给真实对象9的那些激光信号数据点4。
[0049]
现在,根据本发明的计算机单元设置用于,将过度辐射效应从所反射的激光信号的激光信号数据点4中滤除。下面将结合图3a至图3c描述如何实现这一点的。
[0050]
在第一步骤中,辨识相应于回射器(交通标志3)的那些激光信号数据点4。这通过以下方式实现:借助计算机单元来分析所反射的激光信号的强度水平5。为此,首先假设,回射器大于激光信号数据点4中的像素。借助激光雷达传感器然后测得的强度水平5与所发射的激光功率、回射器的反射率以及激光雷达传感器和回射器之间的距离的平方成比例。换言之,然后从测得的强度水平5中能够得出关于回射器的反射率的结论。相应地,回射器的
反射率借助计算机单元针对每个激光信号数据点4来计算。然后,将所计算的值与由100%反射的朗伯目标所预期的值进行比较。回射器具有这种独特的特性:它们的表观朗伯反射率远超过100%。典型的值介于1000%和100000%之间。因此,具有远超过100%的反射率的所有激光信号数据点4都被辨识为回射器。
[0051]
在第二步骤中,辨识与回射器位于同一激光信号数据点平面的所有特定的激光信号数据点4。附加地,辨识与分配给所述回射器的那些我激光信号数据点4具有距所述激光雷达设备的相同的间距的所有特定的激光信号数据点4。所有这些特定的激光信号数据点4是过度辐射效应的候选者。现在可以出现三种不同的情况。
[0052]
在图3a的第一情况下,所反射的激光信号的回波宽度10大于真实对象9和交通标志3之间的距离。示出真实对象9的强度水平分布11和交通标志3的强度水平分布12作为时间13的函数。在此,真实对象9的强度水平分布11距交通标志3的强度水平分布12的距离大于回波宽度10。探测到两个分离的激光信号数据点4。
[0053]
在图3b的第二情况下,在真实对象9和交通标志3之间的距离小于所反射的激光信号的回波宽度10。示出真实对象9的强度水平分布11和交通标志3的强度水平分布12作为时间13的函数。在此,真实对象9的强度水平分布11距交通标志3的强度水平分布12的距离小于回波宽度10。探测到单个的激光信号数据点4。然而,这个激光信号数据点4具有比真实对象9的强度水平分布11和交通标志3的强度水平分布12的回波宽度更大的回波宽度。测得叠加的强度水平分布14。
[0054]
在图3c的第三情况下,真实对象9和交通标志3位于距激光雷达设备的相同距离处。探测到单个的激光信号数据点4。然而,这个激光信号数据点4具有比真实对象9的强度水平分布11和交通标志3的强度水平分布12的峰值强度水平更高的峰值强度水平。测得叠加的强度水平分布14。
[0055]
以此,回波宽度10和强度水平分布11、12的两个参数允许辨识在交通标志3下方的真实对象9。在此,也可以利用,用于过度辐射效应的激光信号数据点4示出一种如在图1和图2b中图示说明的行为。用于此类激光信号数据点4的强度水平5在此沿垂直方向从交通标志3开始下落。这在函数8中进行说明。这种行为对于过度辐射效应来说是典型的,因为如果增加了距回射器的距离,则会减少过度辐射效应。真实对象9没有表现出这种行为。在此,预期强度水平5中的不连续的行为。因此能够辨识出过度辐射效应。
[0056]
然后,在第三步骤中,能够滤除在过度辐射效应的强度水平5中示出典型行为的所有激光信号数据点4,并且能够滤除与所反射的激光信号具有相同回波宽度的那些激光信号数据点。保留具有不连续的强度水平分布的所有激光信号数据点4。
[0057]
尽管已经通过优选实施例更进一步地说明和描述了本发明,但是本发明不限于所公开的示例,并且本领域技术人员可以在不脱离本发明的保护范围的情况下从中推导出其他变型方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1