一种盲人室内行进避障导航方法
1.本发明主要涉及室内导航领域,具体涉及一种基于移动终端设备的盲人室内行进避障导航方法。
背景技术:
2.根据世界卫生组织和美国视觉与眼科协会2020年的调研记录,全球约有超过22亿人视力受损,其中患有盲症的有4910万人。由于缺失视力,盲人对周围空间的感知能力极为有限,在机场、地铁站、商场、人行通道等拥有复杂室内空间结构的生活场景中,难以准确的感知周围障碍物、行人、和地面变化,容易做出错误的行进决定,引发例如碰撞、跌落、磕绊等危险,危及自身以及他人的安全。
3.目前,盲人主要依靠自身的听力并辅助以盲杖或导盲犬完成对周围环境感知和危险情况预判。然而,背景噪声会干扰盲人的听力判断,盲杖只能探索小范围(《2m)内的障碍物,导盲犬培训周期长、养护困难、很难被广泛的推广使用。而使用超清摄像头、lidar、声呐等传感设备来实时的检测盲人行进过程中的各种障碍物的解决方案普遍存在造价高昂和体积较大难以便携的问题,且这些设备在使用前需要进行复杂的调试和安装,在实际的应用过程中也会受到障碍物材质、环境光线等因素的限制。
4.本发明针对现有盲人室内行进避障方案存在的问题,提出了一种基于移动终端设备声学传感阵列的盲人室内行进导航避障方法。该方法利用移动终端设备上的扬声器发射特定声波信号,由上下麦克风分别接收障碍物反射的回波信号;接着通过发射信号与回波信号计算互相关函数曲线获取障碍物距离,通过障碍物回波信号到达上下麦克风的时间差计算障碍物方位角;然后通过树全局最优化搜索关联障碍物距离和方位角时间序列;接着提取关联后的障碍物时间序列特征;最后根据提取出的特征匹配对应类型障碍物并发出相应告警提醒盲人用户。
技术实现要素:
5.针对现有盲人室内行进避障导航方法普遍存在的设备昂贵,难以操作,易受到多种因素制约、设备能耗过大等缺点,提出了一种基于移动终端设备声学传感阵列的盲人室内行进导航避障方法。该方法只需使用常见移动终端设备,易于普及推广;利用移动设备麦克风、扬声器等非敏感元件,实际使用功耗十分微小;可以探测室内场景下墙壁,桌子等常见静态障碍,也可探测行人等移动障碍物,且探测到障碍物距离和方位角信息较为精确。因此,该方法可普适于盲人室内行进导航避障的场景需求。
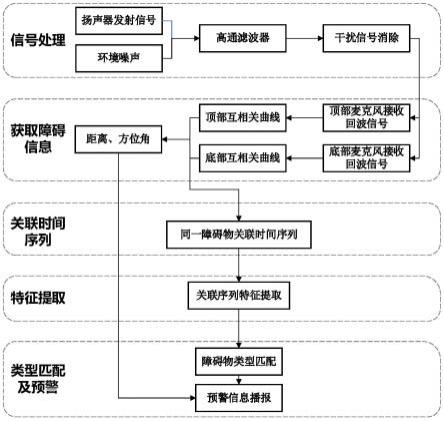
6.本发明为实现上述目标所采用的技术方案为:此盲人室内行进避障导航方法主要包括五个步骤:信号设计与处理、获取障碍物信息、关联障碍物时间序列、提取障碍物序列特征、匹配障碍物类别及预警。技术方案
7.1.信号设计与处理:移动设备扬声器发射声波信号频段处在人耳能听到频率到设
备扬声器硬件最大发声频率之间,采用扫频信号以提高信号强度,具体发射声波信号设计为如下:其中a0为信号幅度,t为扫频信号长度,fh为扫频信号的最高频,设为20khz,f
l
为扫频信号的最低频,设为16khz;室内环境噪声(如脚步声、交谈声)频率在10khz以下,设备麦克风经过高通滤波器过滤环境噪声后接收回波信号,而消除来自用户身体的反射干扰信号则可通过最小二乘优化实现:从扬声器发射声波信号sc到麦克风接收回波信号r(t),遵循以下多径反射模型:其中,u1为用户身体反射路径集合,u2为其他路径反射集合。hi为某条反射路径的声波衰减系数,τ为信号通过某条路径传播的时间。来自人体的反射信号通过以下的无约束的最小二乘优化模型提取,采用经典梯度下降方法解决。
8.2.获取障碍物信息:1)距离:扬声器发出的声波信号与麦克风接收的回波信号计算互相关(cross-correlation) 曲线,曲线上的峰值代表一个障碍物,通过障碍物的峰值所对应采样时间计算障碍物距离。互相关曲线计算公式如下:障碍物距离计算公式如下:其中ti为某个障碍物波峰在在互相关曲线上的采样时间,fs为采样频率48000hz,ss为声波在空气中的传播速率343.72m/s。2)方位角:移动终端设备自身长度的存在使得回波信号到达上下麦克风的时间(tdoa) 存在细微差距,因而障碍物到上下麦克风的距离不同。根据上下麦克风与障碍的三角关系,可通过反三角函数计算出障碍物的方位角信息。方位角计算公式如下:其中a为移动设备上下麦克风连线长度,d1为下麦克风到障碍物的计算距离,d2为上麦克风到障碍物的计算距离。
9.3.障碍物时间序列关联:以第一次探测的障碍物集合作为树根结点,将连续探测到新的一组障碍物集合作为叶子节点加入树中,搜索从根节点到叶子节点的最短路径,将路径上的节点作为障碍物的时间关联序列。
10.4.序列特征提取:提取关联后障碍物方位角时间序列的均值,方差,变异系数,变化率等统计特征,提取关联后障碍物时间距离序列拟合曲线的斜率变化特征。
11.5.障碍物类型匹配及预警:基于提取到的障碍物序列特征匹配障碍物类型并进行语音提示。具体可分为:1)当探测到障碍物的方位角序列均值为90
°
,方差低于阈值,变异系数低于阈值,变化率低于阈值,距离序列拟合直线斜率数值接近盲人步行速率值时,判定为静态障碍物,语音提示前方为静态障碍物及播报障碍物距离和方位角信息;2)当探测到障碍物的方位角序列均值偏离90
°
,方差高于阈值,变异系数高于阈值,变化率高于阈值,距离序列无法拟合直线,斜率变化率高于阈值时,判定为动态障碍物(行人),语音提示行人注意礼让盲人用户及播报离行人距离和方位角信息。有益效果
12.此盲人室内行进避障导航方法无需特殊导盲设备或器件,只需要常见移动终端设备,易于普及推广;不涉及摄像头等硬件,只需要移动设备麦克风、扬声器等非敏感元件,实际使用功耗十分微小;可以探测室内场景下墙壁,桌子等常见静态障碍,也可探测行人等移动障碍物,且探测到障碍物距离和方位角信息较为精确。因此,该方法可普适于盲人室内行进导航避障的场景需求。
附图说明
13.图1为盲人室内行进避障导航方法的基本框图。
14.图2为发射信号扫频范围及间隔示意图。
15.图3为发射信号与回波信号卷积互相关曲线图。
16.图4为障碍物到达左右麦克风距离差值折线图。
17.图5为障碍物位置相对于盲人位置的角度折线图。
18.图6为检测到的障碍物距离及方位角极坐标图。
具体实施方式
19.下面结合附图对本发明进一步说明。
20.如图1所示,本盲人室内行进避障导航方法主要包括五个步骤:信号设计与处理、获取障碍物信息、关联障碍物时间序列、提取障碍物序列特征和匹配障碍物类别及预警。
21.图2为麦克风发射的信号扫频分量图。高频频率h为20khz,低频频率为16khz。两次信号的发射间隔为30ms,设置此信号发射间隔不会产生信号交叠,同时回波信号能以较低时延接收。
22.图3为发射信号与回波信号进行卷积获得的互相关曲线。曲线上的波峰代表潜在的障碍物,将互相关曲线进行峰值平滑后过滤掉不符合实际的小波峰,通过波峰对应的采样时间可计算得到障碍物的距离信息。
23.图4为障碍物到达左右麦克风距离差值折线图。在测量范围内过滤掉非真实障碍物后共检测到8个实际障碍物,由于移动设备自身长度的存在,障碍物距离上麦克风与距离下麦克风的距离存在差值,因而可以用于障碍物方位角的计算。
24.图5为障碍物位置相对于盲人的方位角度图。在测量范围内检测到8个障碍物,每
个障碍物、上麦克风和下麦克风可构成空间三角形,分别计算得到每一障碍物的方位角信息。
25.图6为盲人用户在当前位置所检测障碍物距离和方位角信息极坐标图。用户位置为极坐标原点,朝向为坐标系内90
°
方向,障碍物按照极坐标图所示分布存在于盲人的周围。基于障碍物类型与极坐标发出预警语音信息提示盲人用户。
26.上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而以限定本发明。任何熟悉并非用本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1